
- 1最新模型VMamba:颠覆视觉Transformer,下一代主流Backbone?
- 2elf文件格式解析_elf格式解析
- 3mysql query use_mysql_query()函数执行“use 数据库名”这条SQL语句能实现数据库的选择( )。...
- 4git 更新远程仓库的代码_git更新远程仓库代码
- 5Prometheus 云原生 - 基于 file_sd、http_sd 实现 Service Discovery
- 6TCP重传机制详解
- 7linux rdma服务,容器网络启用RDMA高速通讯-Freeflow
- 8Navicat Premium15 正式教程_navicat premium 15使用教程
- 9RKNNToolkit2 推理数据输入问题_csdn knmmc
- 10ArcGIS JSAPI 学习教程 - ArcGIS Maps SDK for JavaScript 所有版本 - (4.5-4.20,4.21,4.22-最新版4.28)引入使用方式_arcgis js api
跨时钟域总结
赞
踩
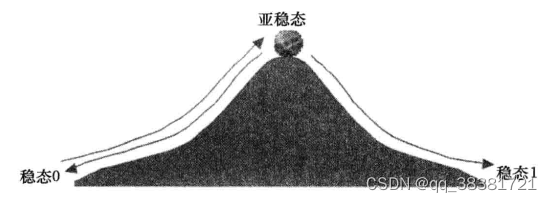
亚稳态介绍:
亚稳态是指在设计的正常运行过程中,信号在一定时间内不能达到稳定的0或者1的现象。由于同步系统中,数据与时钟存在固定的关系,其输入信号满足触发器的时序要求,即建立时间和保持时间,所以不会发送亚稳态现象;而对于异步系统,数据与时钟关系不固定,当出现不满足建立时间和保持时间的现象时,就会输出亚稳态,输出介于0和1之间的不定态。
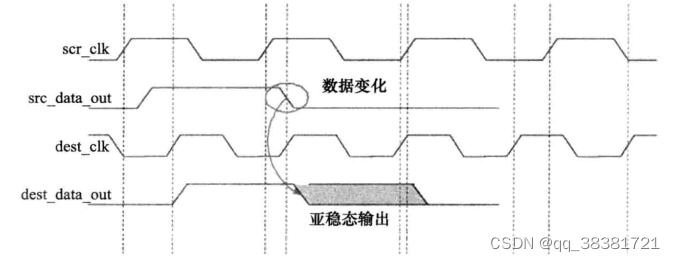
举例:输入信号(src_data_out)在源时钟域(src_clk)的亚稳态窗内发生了变化,在另一个时钟域(dest_clk)对该输入信号采样时,就会导致输出出现亚稳态(dest_data_out)。
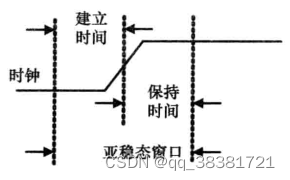
所谓亚稳态窗,就是建立时间+保持时间
另:在异步复位中,如果复位信号不满足removal time和recovery time也会出现亚稳态。
而对于容易出现亚稳态现象的电路则需要进行跨时钟域处理。
跨时钟域介绍:
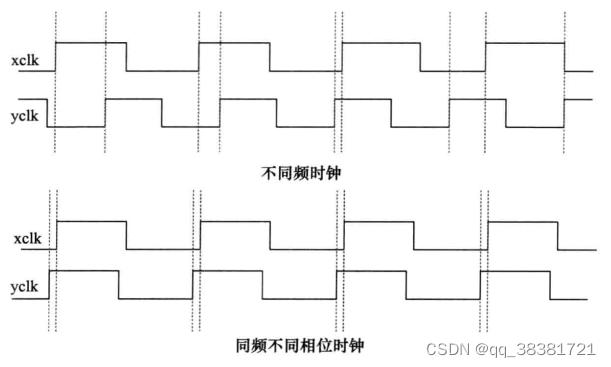
跨时钟域主要目的是保证数据从A时钟到B时钟的正确传递,其发生于多时钟域下,包含以下关系:
1. 时钟频率不同;
2. 时钟频率相同,但相位不同;
跨时钟域信号的传输分为两类:
1. 控制信号的传输(单bit信号)
2. 数据信号的传输(多bit信号)
其中,控制信号的传输分为从快时钟域到慢时钟域的传输,慢时钟域到快时钟域的传输。
慢时钟域到快时钟域的传输——延迟打拍:
此类传输可直接使用两级触发器进行缓存即可,因为理论上,快时钟域总会采集到慢时钟域的信号;在快时钟域下,对慢时钟域的信号进行连续缓存两次,可有效降低因建立时间和保持时间的不满足而导致的亚稳态问题。
- RTL code:
- module pulse_syn_slow2f(
- input clk_f,clk_s,rst_n,signal_slow,
- output signal_fast
- );
- reg signal_fast_r, signal_fast_rr;
- always @(posedge clk_f or negedge rst_n)begin
- if(!rst_n)begin
- signal_fast_r <= 1'b0;
- signal_fast_rr <= 1'b0;
- end
- else begin
- signal_fast_r <= signal_slow;
- signal_fast_rr <= signal_fast_r;
- end
- end
- //上升沿检测
- assign signal_fast = !signal_fast_rr && signal_fast_r;
- /*
- 下降沿检测
- assign signal_fast = signal_fast_rr && !signal_fast_r;
- */
- endmodule

快时钟域到慢时钟域的传输——握手传输:
此类情况,容易出现在慢时钟域中无法采集到快时钟域的信号,可采用握手传输的方式进行跨时钟域处理。
原理:
1. 在快时钟域下,对输入的脉冲信号进行检测,检测到输入的脉冲信号后,输出一个高电平信号,不急于将信号拉低,保持高电平状态;
2. 在慢时钟域下,对快时钟域下输出的高电平信号进行延迟打拍采样;
3. 在慢时钟域下,确认得到高电平信号后,输出反馈信号给快时钟域;
4. 快时钟域对反馈信号进行延迟打拍采样,确认接收到反馈信号,拉低输出的高电平信号;
- RTL code:
- module pulse_syn_fast2s
- #(parameter pulse_init = 1'b0)(
- input rst_n,clk_fast,pulse_fast,clk_slow,
- output pulse_slow);
- wire clear_n;
- reg pulse_fast_r;
- //(1)快时钟域对脉冲信号检测,并不急于将信号拉低,保持输出信号为高电平状态
- always @(posedge clk_fast or negedge rst_n)begin
- if(!rst_n)
- pulse_fast_r <= pulse_init;
- else if(!clear_n)
- pulse_fast_r <= 1'b0;
- else if(pulse_fast)
- pulse_fast_r <= 1'b1;
- end
- //(2)慢时钟域下对信号进行延迟打拍采样
- reg [1:0] pulse_fast2s_r;
- always @(posedge clk_slow or negedge rst_n)begin
- if(!rst_n)
- pulse_fast2s_r <= 2'b0;
- else
- pulse_fast2s_r <= {pulse_fast2s_r[0],pulse_fast_r};
- end
- assign pulse_slow = pulse_fast2s_r[1];
- //(3)快时钟域下对慢时钟域的反馈信号延迟打拍采样
- reg [1:0] pulse_slow2f_r;
- always @(posedge clk_fast or negedge rst_n)begin
- if(!rst_n)
- pulse_slow2f_r <= 2'b0;
- else
- pulse_slow2f_r <= {pulse_slow2f_r[0],pulse_slow};
- end
- //(4)拉低快时钟域脉冲信号
- assign clear_n = ~(!pulse_fast && pulse_slow2f_r[1]);
- endmodule
数据信号的传输(多bit信号)——异步FIFO:
多位宽数据的异步传输问题,无论是从快时钟到慢时钟,还是从慢时钟到快时钟,
都可以用 FIFO 处理。
异步FIFO系统框图:

FIFO设计的几个关键点:
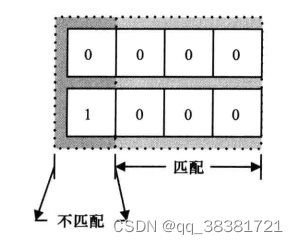
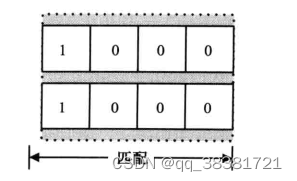
1. FIFO空满的判断:
增加1位标志位,因为FIFO是一种回卷式的读写,将标志位和地址位结合,可进行FIFO空满的判断;假设:读地址和写地址都指向同样的位置,即最高位相同,rdaddr==wraddr,可判断出FIFO此时的状态为读空;若读写地址的最高位不同,其余位相同,即rdaddr[N]==wraddr[N]; rdaddr[N-1:0]==wraddr[N-1:0]; 此时可判断出FIFO状态为写满;写地址比读地址大出一个FIFO深度。在读写吞吐量相同情况下,FIFO深度=写入数据个数-读出数据个数。
FIFO满条件:
FIFO空条件:
2. 格雷码和二进制码的相互转换:
因为格雷码本身的性质,即格雷码相邻两个状态之间只有单比特信号发生跳变,其余信号不变。因此,在FIFO中,地址总线可以先转换成格雷码,再进行两级触发器对格雷码地址进行同步,其误码概率与单比特信号的跨时钟域转换是一致的。
格雷码转二进制:
- bin[3]=gray[3]
- bin[2]=gray[3]^gray[2]
- bin[1]=gray[3]^gray[2]^gray[1]
- bin[0]=gray[3]^gray[2]^gray[1]^gray[0]
-
- RTL code:
- integer i
- always @(*)
- for(i=0;i<=size;i=i+1)
- bin[i] = ^(gray>>i);
二进制转格雷码:
- gray[3]=bin[3]
- gray[2]=bin[2]^bin[3]
- gray[1]=bin[1]^bin[2]
- gray[0]=bin[0]^bin[1]
- RTL code:
- assign gray = (bin>>1)^bin;
注意:先将a时钟的地址格雷码编码,再用b时钟采样格雷码地址进行两级触发器缓存,最后用b时钟对暂存的格雷码地址进行译码。
- RTL code:
- module async_fifo_16x16(
- //fifo_write
- wr_clk,wr_en,almost_full,full,wr_data,wr_reset,
- //fifo_read
- rd_clk,rd_en,almost_empty,empty,rd_data,rd_reset
- );
- /*************** parameter ************************/
- parameter ADDR_WIDTH = 4;
- parameter DATA_WIDTH = 16;
- parameter ALMOST_FULL_GAP = 3;//离满还有 ALMOST_FULL_GAP时,almost_full有效
- parameter ALMOST_EMPTY_GAP = 3;//离空还有ALMOST_EMPTY_GAP时,almost_empty有效
- parameter FIFO_DEEP = 16;
-
- input wr_reset;//wr_clk 下的复位
- input wr_clk;
- input wr_en;
- input [DATA_WIDTH-1:0] wr_data;
- output almost_full;
- output full;
- input rd_reset;
- input rd_clk;
- input rd_en;
- output almost_empty;
- output empty;
- output [DATA_WIDTH-1:0] rd_data;
-
- /*********************** wire && reg ********************/
- wire [DATA_WIDTH-1:0] wr_addr;
- wire [DATA_WIDTH-1:0] rd_addr;
- wire [DATA_WIDTH-1:0] data_out_temp;//FIFO读出数据
- reg [ADDR_WIDTH:0] wr_gap;//写指针与读指针之间的间隔
- reg [ADDR_WIDTH:0] rd_gap;//读指针与写指针之间的间隔
-
- wire [DATA_WIDTH-1:0] rd_data;//fifo data output
- reg almost_full;//fifo almost full
- reg full;
- reg almost_empty;
- reg empty;
- reg [ADDR_WIDTH:0] waddr;//写地址,最高位为指针循环指示
- reg [ADDR_WIDTH:0] waddr_gray;//写地址格雷码
- reg [ADDR_WIDTH:0] waddr_gray_sync_dl;//写地址格雷码,同步到读时钟域
- reg [ADDR_WIDTH:0] waddr_gray_sync;
- reg [ADDR_WIDTH:0] raddr;//读地址,最高位为指针循环指示位
- reg [ADDR_WIDTH:0] raddr_gray;//读地址格雷码
- reg [ADDR_WIDTH:0] raddr_gray_sync_dl;//同步到写时钟域的读地址格雷码
- reg [ADDR_WIDTH:0] raddr_gray_sync;
- reg [ADDR_WIDTH:0] raddr_gray2bin;//读地址的二进制码
- reg [ADDR_WIDTH:0] waddr_gray2bin;//写地址的二进制码
- reg wen;//RAM写使能
- reg ren;//RAM读使能
-
- /************** 异步FIFO读/写地址的格雷码编码 ****************/
- //写控制逻辑
- //RAM写使能与地址
- assign wen = wr_en && (!full);
- //fifo write address generated
- always @(posedge wr_clk or posedge wr_reset)
- if(wr_reset)
- waddr <= {(ADDR_WIDTH+1){1'b0}};
- else if(wen)
- waddr <= waddr + 1'b1;
- assign wr_addr = waddr[ADDR_WIDTH-1:0];//写地址连接到RAM存储器
- //fifo write address : bin2gray
- always @(posedge wr_clk or posedge wr_reset)
- if(wr_reset)
- waddr_gray <= {(ADDR_WIDTH+1){1'b0}};
- else
- waddr_gray <= waddr ^ {1'b0,waddr[ADDR_WIDTH:1]};//原二进制码左移一位,高位补零,再与原二进制码进行异或
-
- //fifo read address gray sync to wr_clk
- always @(posedge wr_clk or posedge wr_reset)
- if(wr_reset)begin
- raddr_gray_sync <= {(ADDR_WIDTH+1){1'b0}};
- raddr_gray_sync_dl <= {(ADDR_WIDTH+1){1'b0}};
- end
- else begin
- raddr_gray_sync <= raddr_gray;
- raddr_gray_sync_dl <= raddr_gray_sync;
- end
-
- //读地址格雷码转变为二进制码
- always @(*)begin
- raddr_gray2bin = {
- raddr_gray_sync_dl[4],
- raddr_gray_sync_dl[4]^raddr_gray_sync_dl[3],
- raddr_gray_sync_dl[4]^raddr_gray_sync_dl[3]^raddr_gray_sync_dl[2],
- raddr_gray_sync_dl[4]^raddr_gray_sync_dl[3]^raddr_gray_sync_dl[2]^raddr_gray_sync_dl[1],
- raddr_gray_sync_dl[4]^raddr_gray_sync_dl[3]^raddr_gray_sync_dl[2]^raddr_gray_sync_dl[1]^raddr_gray_sync_dl[0]
- };
- end
- //写指针与读指针间隔计算
- /*wraddr和rdaddr最高位不等时,rdaddr[3:0]>wraddr[3:0],低4位直接相减即可*/
- /*wraddr和rdaddr最高位相等时,rdaddr[3:0]<wraddr[3:0],wraddr减去rdaddr得到
- 已经写入FIFO的数值,要得到还剩多少个就要满则必须由FIFO深度减去该值*/
- always @(*)begin
- if(raddr_gray2bin[4]^waddr[4])
- wr_gap = raddr_gray2bin[3:0]-waddr[3:0];
- else
- wr_gap = FIFO_DEEP + raddr_gray2bin - waddr;
- end
-
- //almost_full 信号产生
- always @(posedge wr_clk or posedge wr_reset)begin
- if(wr_reset)
- almost_full <= 1'b0;
- else begin
- if(wr_gap < ALMOST_FULL_GAP)begin
- almost_full <= 1'b1;
- end
- else
- almost_full <= 1'b0;
- end
- end
- //full 信号产生
- always @(posedge wr_clk or posedge wr_reset)
- if(wr_reset)
- full <= 1'b0;
- else
- full <= (!(|wr_gap)) || ((wr_gap==1)&wr_en);
-
-
- //异步FIFO读控制逻辑
- //RAM读使能
- assign ren = rd_en && (!empty);
- //FIFO读地址产生
- always @(posedge rd_clk or posedge rd_reset)
- if(rd_reset)
- raddr <= {(ADDR_WIDTH+1){1'b0}};
- else if(ren)
- raddr <= raddr + 1'b1;
- assign rd_addr = raddr[ADDR_WIDTH-1:0];//连接到FIFO内RAM存储器的读地址
- //写地址:bin2gray
- always @(posedge rd_clk or posedge rd_reset)
- if(rd_reset)
- raddr_gray <= {(ADDR_WIDTH+1){1'b0}};
- else
- raddr_gray <= raddr ^ {1'b0,raddr[ADDR_WIDTH:1]};
- //写地址同步到读时钟
- always @(posedge rd_clk or posedge rd_reset)begin
- if(rd_reset)begin
- waddr_gray_sync <= {(ADDR_WIDTH+1){1'b0}};
- waddr_gray_sync_dl <= {(ADDR_WIDTH+1){1'b0}};
- end
- else begin
- waddr_gray_sync <= waddr_gray;
- waddr_gray_sync_dl <= waddr_gray_sync;
- end
- end
- //写地址格雷码变成二进制
- always @(*)begin
- waddr_gray2bin = {
- waddr_gray_sync_dl[4],
- waddr_gray_sync_dl[4]^waddr_gray_sync_dl[3],
- waddr_gray_sync_dl[4]^waddr_gray_sync_dl[3]^waddr_gray_sync_dl[2],
- waddr_gray_sync_dl[4]^waddr_gray_sync_dl[3]^waddr_gray_sync_dl[2]^addr_gray_sync_dl[1],
- waddr_gray_sync_dl[4]^waddr_gray_sync_dl[3]^waddr_gray_sync_dl[2]^addr_gray_sync_dl[1]^waddr_gray_sync_dl[0]
- };
- end
-
- //读指针与写指针的间隔
- always @(*)
- rd_gap = waddr_gray2bin - raddr;
-
- //almost_empty信号产生
- always @(posedge rd_clk or posedge rd_reset)
- if(rd_reset)
- almost_empty <= 1'b1; //重置时,FIFO应为空
- else begin
- if(rd_gap < ALMOST_EMPTY_GAP)
- almost_empty <= 1'b1;
- else
- almost_empty <= 1'b0;
- end
- //产生empty信号
- always @(posedge rd_clk or posedge rd_reset)begin
- if(rd_reset)
- empty <= 1'b1;
- else
- empty <= (!(|rd_gap))||((rd_gap==1)&rd_en);
- end
-
- //例化FIFO内部RAM寄存器
- ram_16x16 ul(
- //port a
- .clka (wr_clk),
- .addra (wr_addr),
- .dina (wr_data),
- .wra(wen),
- //port b
- .clkb(rd_clk),
- .addrb(rd_addr),
- .doutb(rd_data),
- .rdb(ren)
- );
-
- endmodule
参考资料:
《FPGA深度解析》
《硬件架构的艺术》
《菜鸟教程——跨时钟域处理》

