
- 1使用Transformer 模型进行时间序列预测的Pytorch代码示例_pytorch实现transfomer进行时序预测,预测未来多个时间点的值
- 2阿里P8凡尔赛一波:凭这份阿里面试突击指南,我已经拿了9次大厂Offer_首次公开!阿里p8技术团队编写的“大厂面试参考指南”,全部啃完后,你还怕拿不到off
- 3堆排序算法(图解详细流程)
- 4Python中英文小说词频统计与情感分析_英文小说词频python
- 5(六:1)Elasticsearch的分片数如何设置_es内存和磁盘官方建议比例
- 6JUnit5 【最实用最简洁】_junit5 before
- 7C++循环队列(模板类)_c++ 循环队列
- 8从零开始搭建 —— Anaconda + PyCharm + PyTorch(GPU)+ 虚拟环境(全步骤)_anaconda pycharm pytorch
- 9支付宝快捷注册万里汇WorldFirst个人账号教程!_万里汇可以私人收款么
- 10java上传文件到linux文件下_java base64img上传linux服务器
【ROS学习笔记】9.客户端Client的编程实现_ros2clientcall
赞
踩
基于B站ROS公开课:【古月居】古月·ROS入门21讲
基于Ubuntu 20.04.1、Noetic版本
修正错误,并详述Python版本部署
这节来到通信模式之二的Service模式,其使用“ 客户端/服务器(C/S)模型”的方式来通信。
是一种带有反馈的同步通信机制。
之前我们曾通过命令行工具
rosservice call /spawn ...生成一只新的海龟。这次通过程序的形式发布服务请求,使客户端在海龟仿真器生成一只新的小海龟。
我们先看要实现的这个小程序的图。
(部分图摘自:b站【古月居】古月·ROS入门21讲)
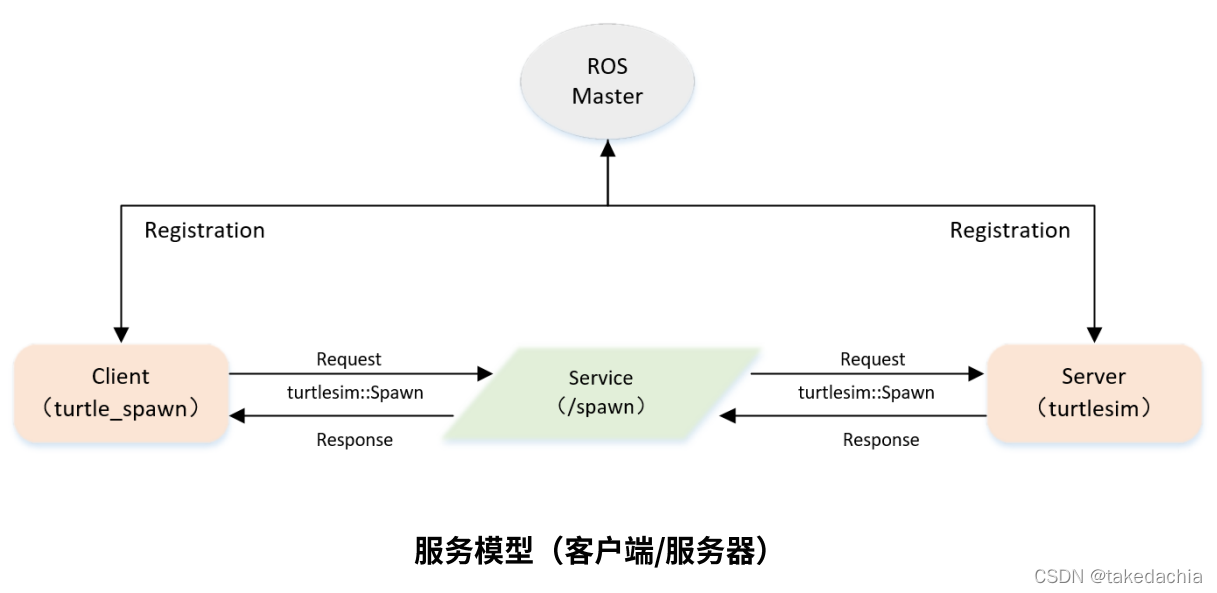
1 模型图
Sever端是海龟仿真器/turtlesim,Client端是待实现的程序,其作为Response的节点,并产生Request的请求,发给Server端。Server端收到Request请求后产生一只海龟,回馈一个Response给Client海龟产生是否成功。Service的名称为/spawn,中间传输消息的数据结构为turtlesim::Spawn。
ROS Master负责管理节点。
2 创建功能包
这次我们创建新的功能包 learning_service
cd ~/catkin_ws/src
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
- 1
- 2

3 创建代码并编译运行(C++)
如何实现一个客户端Client
- 初始化ROS
- 创建一个Client实例
- 发布服务请求数据
- 等待Server处理之后的应答结果
创建客户端Client代码
(源码:https://github.com/guyuehome/ros_21_tutorials/tree/master/learning_service/src)
将源码turtle_spawn.cpp拷贝到src文件夹下。我用红字标上了代码讲解。

编译
先配置CMakeLists.txt编译规则:
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库;
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
- 1
- 2
拷贝到CMakeLists.txt对应位置。

然后编译:
cd ~/catkin_ws
catkin_make
- 1
- 2
编译成功,在 devel/lib/learning_service 下生成库

运行
默认已经source,接着运行。
roscore
- 1
rosrun turtlesim turtlesim_node
- 1
rosrun learning_service turtle_spawn
- 1
成功生成第二只海龟!

4 创建代码并编译运行(Python)
如何实现一个客户端Client
- 初始化ROS
- 创建一个Client实例
- 发布服务请求数据
- 等待Server处理之后的应答结果
创建客户端Client代码
(源码:https://github.com/guyuehome/ros_21_tutorials/tree/master/learning_service/scripts)
将源码turtle_spawn.py拷贝到新建的scripts文件夹下。我用红字标上了代码讲解。
可以看到Python不需要C++中的另一个call阻塞型函数来等待服务器的反馈,而是建立ServiceProxy机制,直接add_turtle传入参数创建请求数据,赋为response以返回它的name。
 【注意】这里是Python2代码,接着需要如下图修改成Python3:
【注意】这里是Python2代码,接着需要如下图修改成Python3:
- 两个print语句后面的内容用括号括起来
- except 后面的逗号 , 改成 as

右击py文件→属性,打开执行权限。
编译
配置CMakeLists.txt编译规则,注意和C++的区别:
我们只要加上一个关于turtle_spawn.py的catkin_install_python方法:
下面代码写到指定位置:

然后编译:
cd ~/catkin_ws
catkin_make
- 1
- 2
编译成功,在 devel/lib/learning_service 下生成py调用库。
运行
默认已经source,接着运行。
roscore
- 1
rosrun turtlesim turtlesim_node
- 1
rosrun learning_service turtle_spawn.py
- 1
成功!


