
热门标签
热门文章
- 1第一卷清晨的帝国 第一百四十八章 一夜无言观山景_看着他怜惜摇头,说道:“以前你说过很多次想进二层楼,我当时也没怎么在意,心想你的
- 2140+ 款常用安全工具分类汇总,全网最全清单,只此一份!(内含工具获取链接,收藏不迷路)
- 3纯跟踪算法Pure Pursuit
- 4Unity实现生成本地二维码并访问二维码内容_unity 二维码局域网下载
- 5hive 日誌怎麼查看_如何hadoop 看hive执行日志
- 6大数据开发平台:Spark环境搭建:看这一篇博客就够了!!_spark的开发平台
- 7LetCode 127. 单词接龙_python 127. 单词接龙
- 8Linux用户账户的管理_1.分别写出用户账户信息文件,用户口令文件,组群账户信息文件,组群口令口令、管理
- 9小白学习微信小程序的客户端与服务端交互_微信小程序 服务端
- 10K-Means聚类算法(matlab)_k-means clustering algorithm initialization proces
当前位置: article > 正文
ROS2机器人编程简述humble-第一章-Introduction_ros-humble-joy
作者:盐析白兔 | 2024-07-08 05:42:07
赞
踩
ros-humble-joy
ROS2机器人编程简述新书推荐-A Concise Introduction to Robot Programming with ROS2
学习笔记流水账-推荐阅读原书。
第一章:简要介绍宏观概念,配置编译一下本书配套的源码包。
支持版本个人测试foxy和humble全部都OK。
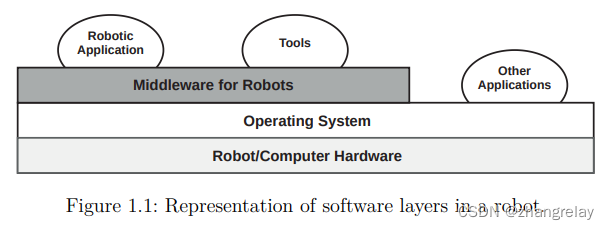
硬件+软件+机器人应用关系如下图所示:
ROS2最新的长期支持版本humble:

官方支持到:2027年5月
•社区:ROS社区是使用此中间件开发机器人应用程序的基本要素。除了提供技术文档外,还有一个庞大的开发人员社区,他们通过公共存储库为自己的应用程序和实用程序做出贡献,其他开发人员也可以为其做出贡献。社区的另一个成员可能已经开发了您需要的东西。
•计算图:计算图是一个正在运行的ROS2应用程序。该图由节点和弧组成。节点(ROS2中的主要计算单元)可以使用几种不同的通信范式与其他节点协作,以组成ROS2应用程序。此维度还处理监视工具,这些工具也是插入到此图中的节点。
•工作区:工作区是安装在机器人或计算机上的一组软件,以及用户开发的程序。与具有动态性质的计算图不同,工作区是静态的。这个维度还涉及构建计算图元素的开发工具。
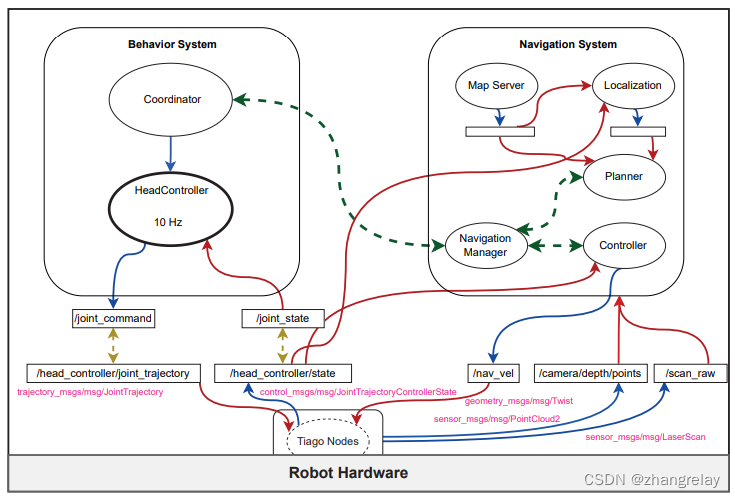
使用导航子系统的Tiago机器人基于行为的应用程序的计算图如下所示:
需要先安装标准桌面版ros2-humble。
请参考官网:sudo apt install ros-humble-desktop
记录如下
- zhangrelay@LAPTOP-5REQ7K1L:~/ros_ws/book_ros2$ sudo apt install ros-humble-desktop
- [sudo] password for zhangrelay:
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- ros-humble-desktop is already the newest version (0.10.0-1jammy.20221207.081220).
- 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
配置缺失功能包:rosdep install --from-paths src --ignore-src -r -y
记录如下:
- zhangrelay@LAPTOP-5REQ7K1L:~/ros_ws/book_ros2$ rosdep install --from-paths src --ignore-src -r -y
- executing command [sudo -H apt-get install -y ros-humble-gazebo-ros2-control]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- ros-humble-control-msgs ros-humble-controller-interface
- ros-humble-controller-manager ros-humble-controller-manager-msgs
- ros-humble-hardware-interface ros-humble-realtime-tools
- ros-humble-ros2-control-test-assets
- The following NEW packages will be installed:
- ros-humble-control-msgs ros-humble-controller-interface
- ros-humble-controller-manager ros-humble-controller-manager-msgs
- ros-humble-gazebo-ros2-control ros-humble-hardware-interface
- ros-humble-realtime-tools ros-humble-ros2-control-test-assets
- 0 upgraded, 8 newly installed, 0 to remove and 0 not upgraded.
- Need to get 1,353 kB of archives.
- After this operation, 13.4 MB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-control-msgs amd64 4.1.0-1jammy.20221108.173042 [345 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-hardware-interface amd64 2.18.0-1jammy.20221206.193309 [221 kB]
- Get:3 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-controller-interface amd64 2.18.0-1jammy.20221206.193752 [31.6 kB]
- Get:4 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-controller-manager-msgs amd64 2.18.0-1jammy.20221206.193123 [200 kB]
- Get:5 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-realtime-tools amd64 2.4.0-1jammy.20221202.024821 [24.2 kB]
- Get:6 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-ros2-control-test-assets amd64 2.18.0-1jammy.20221206.193145 [11.4 kB]
- Get:7 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-controller-manager amd64 2.18.0-1jammy.20221207.042157 [327 kB]
- Get:8 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-gazebo-ros2-control amd64 0.4.0-1jammy.20221207.061606 [192 kB]
- Fetched 1,353 kB in 13s (106 kB/s)
- Selecting previously unselected package ros-humble-control-msgs.
- (Reading database ... 180542 files and directories currently installed.)
- Preparing to unpack .../0-ros-humble-control-msgs_4.1.0-1jammy.20221108.173042_amd64.deb ...
- Unpacking ros-humble-control-msgs (4.1.0-1jammy.20221108.173042) ...
- Selecting previously unselected package ros-humble-hardware-interface.
- Preparing to unpack .../1-ros-humble-hardware-interface_2.18.0-1jammy.20221206.193309_amd64.deb ...
- Unpacking ros-humble-hardware-interface (2.18.0-1jammy.20221206.193309) ...
- Selecting previously unselected package ros-humble-controller-interface.
- Preparing to unpack .../2-ros-humble-controller-interface_2.18.0-1jammy.20221206.193752_amd64.deb ...
- Unpacking ros-humble-controller-interface (2.18.0-1jammy.20221206.193752) ...
- Selecting previously unselected package ros-humble-controller-manager-msgs.
- Preparing to unpack .../3-ros-humble-controller-manager-msgs_2.18.0-1jammy.20221206.193123_amd64.deb ...
- Unpacking ros-humble-controller-manager-msgs (2.18.0-1jammy.20221206.193123) ...
- Selecting previously unselected package ros-humble-realtime-tools.
- Preparing to unpack .../4-ros-humble-realtime-tools_2.4.0-1jammy.20221202.024821_amd64.deb ...
- Unpacking ros-humble-realtime-tools (2.4.0-1jammy.20221202.024821) ...
- Selecting previously unselected package ros-humble-ros2-control-test-assets.
- Preparing to unpack .../5-ros-humble-ros2-control-test-assets_2.18.0-1jammy.20221206.193145_amd64.deb ...
- Unpacking ros-humble-ros2-control-test-assets (2.18.0-1jammy.20221206.193145) ...
- Selecting previously unselected package ros-humble-controller-manager.
- Preparing to unpack .../6-ros-humble-controller-manager_2.18.0-1jammy.20221207.042157_amd64.deb ...
- Unpacking ros-humble-controller-manager (2.18.0-1jammy.20221207.042157) ...
- Selecting previously unselected package ros-humble-gazebo-ros2-control.
- Preparing to unpack .../7-ros-humble-gazebo-ros2-control_0.4.0-1jammy.20221207.061606_amd64.deb ...
- Unpacking ros-humble-gazebo-ros2-control (0.4.0-1jammy.20221207.061606) ...
- Setting up ros-humble-ros2-control-test-assets (2.18.0-1jammy.20221206.193145) ...
- Setting up ros-humble-control-msgs (4.1.0-1jammy.20221108.173042) ...
- Setting up ros-humble-realtime-tools (2.4.0-1jammy.20221202.024821) ...
- Setting up ros-humble-controller-manager-msgs (2.18.0-1jammy.20221206.193123) ...
- Setting up ros-humble-hardware-interface (2.18.0-1jammy.20221206.193309) ...
- Setting up ros-humble-controller-interface (2.18.0-1jammy.20221206.193752) ...
- Setting up ros-humble-controller-manager (2.18.0-1jammy.20221207.042157) ...
- Setting up ros-humble-gazebo-ros2-control (0.4.0-1jammy.20221207.061606) ...
- Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-controller-manager]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- ros-humble-controller-manager is already the newest version (2.18.0-1jammy.20221207.042157).
- ros-humble-controller-manager set to manually installed.
- 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
- executing command [sudo -H apt-get install -y ros-humble-diff-drive-controller]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- ros-humble-diff-drive-controller
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 187 kB of archives.
- After this operation, 987 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-diff-drive-controller amd64 2.15.0-1jammy.20221207.061747 [187 kB]
- Fetched 187 kB in 5s (40.8 kB/s)
- Selecting previously unselected package ros-humble-diff-drive-controller.
- (Reading database ... 181602 files and directories currently installed.)
- Preparing to unpack .../ros-humble-diff-drive-controller_2.15.0-1jammy.20221207.061747_amd64.deb ...
- Unpacking ros-humble-diff-drive-controller (2.15.0-1jammy.20221207.061747) ...
- Setting up ros-humble-diff-drive-controller (2.15.0-1jammy.20221207.061747) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-joint-state-broadcaster]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- python3-typeguard ros-humble-generate-parameter-library
- ros-humble-generate-parameter-library-py ros-humble-parameter-traits
- ros-humble-rsl ros-humble-tcb-span ros-humble-tl-expected
- The following NEW packages will be installed:
- python3-typeguard ros-humble-generate-parameter-library
- ros-humble-generate-parameter-library-py ros-humble-joint-state-broadcaster
- ros-humble-parameter-traits ros-humble-rsl ros-humble-tcb-span
- ros-humble-tl-expected
- 0 upgraded, 8 newly installed, 0 to remove and 0 not upgraded.
- Need to get 189 kB of archives.
- After this operation, 946 kB of additional disk space will be used.
- Get:1 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 python3-typeguard all 2.2.2-1.1 [13.3 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-generate-parameter-library-py amd64 0.3.0-1jammy.20221128.191052 [23.9 kB]
- Get:3 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-tcb-span amd64 1.0.2-2jammy.20221108.150956 [10.4 kB]
- Get:4 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-tl-expected amd64 1.0.2-2jammy.20221108.151135 [16.4 kB]
- Get:5 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-rsl amd64 0.2.1-1jammy.20221202.033627 [20.4 kB]
- Get:6 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-parameter-traits amd64 0.3.0-1jammy.20221202.034430 [9,574 B]
- Get:7 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-generate-parameter-library amd64 0.3.0-1jammy.20221202.034649 [7,758 B]
- Get:8 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joint-state-broadcaster amd64 2.15.0-1jammy.20221207.061953 [87.2 kB]
- Fetched 189 kB in 16s (11.8 kB/s)
- Selecting previously unselected package python3-typeguard.
- (Reading database ... 181637 files and directories currently installed.)
- Preparing to unpack .../0-python3-typeguard_2.2.2-1.1_all.deb ...
- Unpacking python3-typeguard (2.2.2-1.1) ...
- Selecting previously unselected package ros-humble-generate-parameter-library-py.
- Preparing to unpack .../1-ros-humble-generate-parameter-library-py_0.3.0-1jammy.20221128.191052_amd64.deb ...
- Unpacking ros-humble-generate-parameter-library-py (0.3.0-1jammy.20221128.191052) ...
- Selecting previously unselected package ros-humble-tcb-span.
- Preparing to unpack .../2-ros-humble-tcb-span_1.0.2-2jammy.20221108.150956_amd64.deb ...
- Unpacking ros-humble-tcb-span (1.0.2-2jammy.20221108.150956) ...
- Selecting previously unselected package ros-humble-tl-expected.
- Preparing to unpack .../3-ros-humble-tl-expected_1.0.2-2jammy.20221108.151135_amd64.deb ...
- Unpacking ros-humble-tl-expected (1.0.2-2jammy.20221108.151135) ...
- Selecting previously unselected package ros-humble-rsl.
- Preparing to unpack .../4-ros-humble-rsl_0.2.1-1jammy.20221202.033627_amd64.deb ...
- Unpacking ros-humble-rsl (0.2.1-1jammy.20221202.033627) ...
- Selecting previously unselected package ros-humble-parameter-traits.
- Preparing to unpack .../5-ros-humble-parameter-traits_0.3.0-1jammy.20221202.034430_amd64.deb ...
- Unpacking ros-humble-parameter-traits (0.3.0-1jammy.20221202.034430) ...
- Selecting previously unselected package ros-humble-generate-parameter-library.
- Preparing to unpack .../6-ros-humble-generate-parameter-library_0.3.0-1jammy.20221202.034649_amd64.deb ...
- Unpacking ros-humble-generate-parameter-library (0.3.0-1jammy.20221202.034649) ...
- Selecting previously unselected package ros-humble-joint-state-broadcaster.
- Preparing to unpack .../7-ros-humble-joint-state-broadcaster_2.15.0-1jammy.20221207.061953_amd64.deb ...
- Unpacking ros-humble-joint-state-broadcaster (2.15.0-1jammy.20221207.061953) ...
- Setting up ros-humble-tl-expected (1.0.2-2jammy.20221108.151135) ...
- Setting up python3-typeguard (2.2.2-1.1) ...
- Setting up ros-humble-tcb-span (1.0.2-2jammy.20221108.150956) ...
- Setting up ros-humble-generate-parameter-library-py (0.3.0-1jammy.20221128.191052) ...
- Setting up ros-humble-rsl (0.2.1-1jammy.20221202.033627) ...
- Setting up ros-humble-parameter-traits (0.3.0-1jammy.20221202.034430) ...
- Setting up ros-humble-generate-parameter-library (0.3.0-1jammy.20221202.034649) ...
- Setting up ros-humble-joint-state-broadcaster (2.15.0-1jammy.20221207.061953) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-joy-teleop]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- ros-humble-teleop-tools-msgs
- The following NEW packages will be installed:
- ros-humble-joy-teleop ros-humble-teleop-tools-msgs
- 0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
- Need to get 94.3 kB of archives.
- After this operation, 1,172 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-teleop-tools-msgs amd64 1.3.0-1jammy.20221128.183604 [75.7 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joy-teleop amd64 1.3.0-1jammy.20221207.031146 [18.6 kB]
- Fetched 94.3 kB in 3s (27.2 kB/s)
- Selecting previously unselected package ros-humble-teleop-tools-msgs.
- (Reading database ... 181863 files and directories currently installed.)
- Preparing to unpack .../ros-humble-teleop-tools-msgs_1.3.0-1jammy.20221128.183604_amd64.deb ...
- Unpacking ros-humble-teleop-tools-msgs (1.3.0-1jammy.20221128.183604) ...
- Selecting previously unselected package ros-humble-joy-teleop.
- Preparing to unpack .../ros-humble-joy-teleop_1.3.0-1jammy.20221207.031146_amd64.deb ...
- Unpacking ros-humble-joy-teleop (1.3.0-1jammy.20221207.031146) ...
- Setting up ros-humble-teleop-tools-msgs (1.3.0-1jammy.20221128.183604) ...
- Setting up ros-humble-joy-teleop (1.3.0-1jammy.20221207.031146) ...
- Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-twist-mux]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- ros-humble-twist-mux
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 212 kB of archives.
- After this operation, 945 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-twist-mux amd64 4.1.0-3jammy.20221207.034508 [212 kB]
- Fetched 212 kB in 17s (12.5 kB/s)
- Selecting previously unselected package ros-humble-twist-mux.
- (Reading database ... 181995 files and directories currently installed.)
- Preparing to unpack .../ros-humble-twist-mux_4.1.0-3jammy.20221207.034508_amd64.deb ...
- Unpacking ros-humble-twist-mux (4.1.0-3jammy.20221207.034508) ...
- Setting up ros-humble-twist-mux (4.1.0-3jammy.20221207.034508) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-nav2-bringup]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- libamd2 libbtf1 libcamd2 libccolamd2 libceres-dev libceres2 libcholmod3
- libcolamd2 libcxsparse3 libgoogle-glog-dev libgoogle-glog0v5 libgraphblas-dev
- libgraphblas6 libklu1 libldl2 libmetis5 libmongoose2 librbio2 libsliplu1 libspqr2
- libsuitesparse-dev libsuitesparseconfig5 libumfpack5 libunwind-dev
- nlohmann-json3-dev ros-humble-behaviortree-cpp-v3 ros-humble-costmap-queue
- ros-humble-dwb-core ros-humble-dwb-critics ros-humble-dwb-msgs
- ros-humble-dwb-plugins ros-humble-nav-2d-msgs ros-humble-nav-2d-utils
- ros-humble-nav2-amcl ros-humble-nav2-behavior-tree ros-humble-nav2-behaviors
- ros-humble-nav2-bt-navigator ros-humble-nav2-collision-monitor
- ros-humble-nav2-constrained-smoother ros-humble-nav2-controller
- ros-humble-nav2-core ros-humble-nav2-costmap-2d ros-humble-nav2-dwb-controller
- ros-humble-nav2-navfn-planner ros-humble-nav2-planner
- ros-humble-nav2-regulated-pure-pursuit-controller
- ros-humble-nav2-rotation-shim-controller ros-humble-nav2-rviz-plugins
- ros-humble-nav2-simple-commander ros-humble-nav2-smac-planner
- ros-humble-nav2-smoother ros-humble-nav2-theta-star-planner
- ros-humble-nav2-velocity-smoother ros-humble-nav2-voxel-grid
- ros-humble-nav2-waypoint-follower ros-humble-navigation2 ros-humble-ompl
- ros-humble-slam-toolbox
- The following NEW packages will be installed:
- libamd2 libbtf1 libcamd2 libccolamd2 libceres-dev libceres2 libcholmod3
- libcolamd2 libcxsparse3 libgoogle-glog-dev libgoogle-glog0v5 libgraphblas-dev
- libgraphblas6 libklu1 libldl2 libmetis5 libmongoose2 librbio2 libsliplu1 libspqr2
- libsuitesparse-dev libsuitesparseconfig5 libumfpack5 libunwind-dev
- nlohmann-json3-dev ros-humble-behaviortree-cpp-v3 ros-humble-costmap-queue
- ros-humble-dwb-core ros-humble-dwb-critics ros-humble-dwb-msgs
- ros-humble-dwb-plugins ros-humble-nav-2d-msgs ros-humble-nav-2d-utils
- ros-humble-nav2-amcl ros-humble-nav2-behavior-tree ros-humble-nav2-behaviors
- ros-humble-nav2-bringup ros-humble-nav2-bt-navigator
- ros-humble-nav2-collision-monitor ros-humble-nav2-constrained-smoother
- ros-humble-nav2-controller ros-humble-nav2-core ros-humble-nav2-costmap-2d
- ros-humble-nav2-dwb-controller ros-humble-nav2-navfn-planner
- ros-humble-nav2-planner ros-humble-nav2-regulated-pure-pursuit-controller
- ros-humble-nav2-rotation-shim-controller ros-humble-nav2-rviz-plugins
- ros-humble-nav2-simple-commander ros-humble-nav2-smac-planner
- ros-humble-nav2-smoother ros-humble-nav2-theta-star-planner
- ros-humble-nav2-velocity-smoother ros-humble-nav2-voxel-grid
- ros-humble-nav2-waypoint-follower ros-humble-navigation2 ros-humble-ompl
- ros-humble-slam-toolbox
- 0 upgraded, 59 newly installed, 0 to remove and 0 not upgraded.
- Need to get 36.2 MB of archives.
- After this operation, 249 MB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-behaviortree-cpp-v3 amd64 3.8.0-1jammy.20221202.022001 [285 kB]
- Get:2 http://mirrors.aliyun.com/ubuntu jammy/main amd64 libsuitesparseconfig5 amd64 1:5.10.1+dfsg-4build1 [10.4 kB]
- Get:3 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libamd2 amd64 1:5.10.1+dfsg-4build1 [21.6 kB]
- Get:4 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libbtf1 amd64 1:5.10.1+dfsg-4build1 [12.1 kB]
- Get:5 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libcamd2 amd64 1:5.10.1+dfsg-4build1 [23.3 kB]
- Get:6 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libccolamd2 amd64 1:5.10.1+dfsg-4build1 [25.2 kB]
- Get:7 http://mirrors.aliyun.com/ubuntu jammy/main amd64 libcolamd2 amd64 1:5.10.1+dfsg-4build1 [18.0 kB]
- Get:8 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libmetis5 amd64 5.1.0.dfsg-7build2 [181 kB]
- Get:9 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libcholmod3 amd64 1:5.10.1+dfsg-4build1 [346 kB]
- Get:10 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libcxsparse3 amd64 1:5.10.1+dfsg-4build1 [70.8 kB]
- Get:11 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgoogle-glog0v5 amd64 0.5.0+really0.4.0-2 [60.3 kB]
- Get:12 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libspqr2 amd64 1:5.10.1+dfsg-4build1 [71.6 kB]
- Get:13 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libceres2 amd64 2.0.0+dfsg1-5 [834 kB]
- Get:14 http://mirrors.aliyun.com/ubuntu jammy/main amd64 libunwind-dev amd64 1.3.2-2build2 [1,882 kB]
- Get:15 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgoogle-glog-dev amd64 0.5.0+really0.4.0-2 [91.9 kB]
- Get:16 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libklu1 amd64 1:5.10.1+dfsg-4build1 [77.6 kB]
- Get:17 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libldl2 amd64 1:5.10.1+dfsg-4build1 [11.7 kB]
- Get:18 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libmongoose2 amd64 1:5.10.1+dfsg-4build1 [33.5 kB]
- Get:19 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-voxel-grid amd64 1.1.3-1jammy.20221207.041245 [19.5 kB]
- Get:20 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libumfpack5 amd64 1:5.10.1+dfsg-4build1 [250 kB]
- Get:21 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 librbio2 amd64 1:5.10.1+dfsg-4build1 [26.6 kB]
- Get:22 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libsliplu1 amd64 1:5.10.1+dfsg-4build1 [37.1 kB]
- Get:23 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-costmap-2d amd64 1.1.3-1jammy.20221207.050306 [895 kB]
- Get:24 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libsuitesparse-dev amd64 1:5.10.1+dfsg-4build1 [1,058 kB]
- Get:25 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libceres-dev amd64 2.0.0+dfsg1-5 [1,177 kB]
- Get:26 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgraphblas6 amd64 6.1.4+dfsg-2 [20.1 MB]
- Get:27 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgraphblas-dev amd64 6.1.4+dfsg-2 [54.4 kB]
- Get:28 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 nlohmann-json3-dev all 3.10.5-2 [167 kB]
- Get:29 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-costmap-queue amd64 1.1.3-1jammy.20221207.063710 [19.1 kB]
- Get:30 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav-2d-msgs amd64 1.1.3-1jammy.20221110.224153 [68.0 kB]
- Get:31 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-msgs amd64 1.1.3-1jammy.20221110.224320 [129 kB]
- Get:32 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav-2d-utils amd64 1.1.3-1jammy.20221207.044652 [24.1 kB]
- Get:33 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-core amd64 1.1.3-1jammy.20221207.051902 [11.0 kB]
- Get:34 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-core amd64 1.1.3-1jammy.20221207.052140 [190 kB]
- Get:35 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-critics amd64 1.1.3-1jammy.20221207.063858 [61.6 kB]
- Get:36 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-plugins amd64 1.1.3-1jammy.20221207.053319 [45.6 kB]
- Get:37 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-amcl amd64 1.1.3-1jammy.20221207.044549 [345 kB]
- Get:38 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-behavior-tree amd64 1.1.3-1jammy.20221207.044559 [1,052 kB]
- Get:39 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-behaviors amd64 1.1.3-1jammy.20221207.052114 [402 kB]
- Get:40 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-bt-navigator amd64 1.1.3-1jammy.20221207.052119 [256 kB]
- Get:41 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-collision-monitor amd64 1.1.3-1jammy.20221207.051848 [225 kB]
- Get:42 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-constrained-smoother amd64 1.1.3-1jammy.20221207.052820 [61.5 kB]
- Get:43 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-controller amd64 1.1.3-1jammy.20221207.052820 [302 kB]
- Get:44 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-dwb-controller amd64 1.1.3-1jammy.20221207.064539 [5,150 B]
- Get:45 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-navfn-planner amd64 1.1.3-1jammy.20221207.052820 [48.0 kB]
- Get:46 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-planner amd64 1.1.3-1jammy.20221207.052822 [200 kB]
- Get:47 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-regulated-pure-pursuit-controller amd64 1.1.3-1jammy.20221207.052822 [82.7 kB]
- Get:48 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-rotation-shim-controller amd64 1.1.3-1jammy.20221207.053601 [104 kB]
- Get:49 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-rviz-plugins amd64 1.1.3-1jammy.20221207.075748 [294 kB]
- Get:50 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-simple-commander amd64 1.1.3-1jammy.20221207.041752 [30.6 kB]
- Get:51 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-ompl amd64 1.5.2-1jammy.20221108.143845 [1,628 kB]
- Get:52 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-smac-planner amd64 1.1.3-1jammy.20221207.052822 [449 kB]
- Get:53 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-smoother amd64 1.1.3-1jammy.20221207.052824 [194 kB]
- Get:54 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-theta-star-planner amd64 1.1.3-1jammy.20221207.052829 [41.3 kB]
- Get:55 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-velocity-smoother amd64 1.1.3-1jammy.20221207.044624 [125 kB]
- Get:56 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-waypoint-follower amd64 1.1.3-1jammy.20221207.052825 [358 kB]
- Get:57 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-navigation2 amd64 1.1.3-1jammy.20221207.081347 [5,550 B]
- Get:58 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-slam-toolbox amd64 2.6.3-1jammy.20221207.075748 [1,646 kB]
- Get:59 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-bringup amd64 1.1.3-1jammy.20221207.081537 [22.1 kB]
- Fetched 36.2 MB in 4min 47s (126 kB/s)
- Extracting templates from packages: 100%
- Selecting previously unselected package libsuitesparseconfig5:amd64.
- (Reading database ... 182035 files and directories currently installed.)
- Preparing to unpack .../00-libsuitesparseconfig5_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libsuitesparseconfig5:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libamd2:amd64.
- Preparing to unpack .../01-libamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libbtf1:amd64.
- Preparing to unpack .../02-libbtf1_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libbtf1:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libcamd2:amd64.
- Preparing to unpack .../03-libcamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libcamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libccolamd2:amd64.
- Preparing to unpack .../04-libccolamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libccolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libcolamd2:amd64.
- Preparing to unpack .../05-libcolamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libcolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libmetis5:amd64.
- Preparing to unpack .../06-libmetis5_5.1.0.dfsg-7build2_amd64.deb ...
- Unpacking libmetis5:amd64 (5.1.0.dfsg-7build2) ...
- Selecting previously unselected package libcholmod3:amd64.
- Preparing to unpack .../07-libcholmod3_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libcholmod3:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libcxsparse3:amd64.
- Preparing to unpack .../08-libcxsparse3_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libcxsparse3:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libgoogle-glog0v5.
- Preparing to unpack .../09-libgoogle-glog0v5_0.5.0+really0.4.0-2_amd64.deb ...
- Unpacking libgoogle-glog0v5 (0.5.0+really0.4.0-2) ...
- Selecting previously unselected package libspqr2:amd64.
- Preparing to unpack .../10-libspqr2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libspqr2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libceres2.
- Preparing to unpack .../11-libceres2_2.0.0+dfsg1-5_amd64.deb ...
- Unpacking libceres2 (2.0.0+dfsg1-5) ...
- Selecting previously unselected package libunwind-dev:amd64.
- Preparing to unpack .../12-libunwind-dev_1.3.2-2build2_amd64.deb ...
- Unpacking libunwind-dev:amd64 (1.3.2-2build2) ...
- Selecting previously unselected package libgoogle-glog-dev.
- Preparing to unpack .../13-libgoogle-glog-dev_0.5.0+really0.4.0-2_amd64.deb ...
- Unpacking libgoogle-glog-dev (0.5.0+really0.4.0-2) ...
- Selecting previously unselected package libklu1:amd64.
- Preparing to unpack .../14-libklu1_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libklu1:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libldl2:amd64.
- Preparing to unpack .../15-libldl2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libldl2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libmongoose2:amd64.
- Preparing to unpack .../16-libmongoose2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libmongoose2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libumfpack5:amd64.
- Preparing to unpack .../17-libumfpack5_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libumfpack5:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package librbio2:amd64.
- Preparing to unpack .../18-librbio2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking librbio2:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libsliplu1:amd64.
- Preparing to unpack .../19-libsliplu1_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libsliplu1:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libsuitesparse-dev:amd64.
- Preparing to unpack .../20-libsuitesparse-dev_1%3a5.10.1+dfsg-4build1_amd64.deb ...
- Unpacking libsuitesparse-dev:amd64 (1:5.10.1+dfsg-4build1) ...
- Selecting previously unselected package libceres-dev.
- Preparing to unpack .../21-libceres-dev_2.0.0+dfsg1-5_amd64.deb ...
- Unpacking libceres-dev (2.0.0+dfsg1-5) ...
- Selecting previously unselected package libgraphblas6:amd64.
- Preparing to unpack .../22-libgraphblas6_6.1.4+dfsg-2_amd64.deb ...
- Unpacking libgraphblas6:amd64 (6.1.4+dfsg-2) ...
- Selecting previously unselected package libgraphblas-dev:amd64.
- Preparing to unpack .../23-libgraphblas-dev_6.1.4+dfsg-2_amd64.deb ...
- Unpacking libgraphblas-dev:amd64 (6.1.4+dfsg-2) ...
- Selecting previously unselected package nlohmann-json3-dev.
- Preparing to unpack .../24-nlohmann-json3-dev_3.10.5-2_all.deb ...
- Unpacking nlohmann-json3-dev (3.10.5-2) ...
- Selecting previously unselected package ros-humble-behaviortree-cpp-v3.
- Preparing to unpack .../25-ros-humble-behaviortree-cpp-v3_3.8.0-1jammy.20221202.022001_amd64.deb ...
- Unpacking ros-humble-behaviortree-cpp-v3 (3.8.0-1jammy.20221202.022001) ...
- Selecting previously unselected package ros-humble-nav2-voxel-grid.
- Preparing to unpack .../26-ros-humble-nav2-voxel-grid_1.1.3-1jammy.20221207.041245_amd64.deb ...
- Unpacking ros-humble-nav2-voxel-grid (1.1.3-1jammy.20221207.041245) ...
- Selecting previously unselected package ros-humble-nav2-costmap-2d.
- Preparing to unpack .../27-ros-humble-nav2-costmap-2d_1.1.3-1jammy.20221207.050306_amd64.deb ...
- Unpacking ros-humble-nav2-costmap-2d (1.1.3-1jammy.20221207.050306) ...
- Selecting previously unselected package ros-humble-costmap-queue.
- Preparing to unpack .../28-ros-humble-costmap-queue_1.1.3-1jammy.20221207.063710_amd64.deb ...
- Unpacking ros-humble-costmap-queue (1.1.3-1jammy.20221207.063710) ...
- Selecting previously unselected package ros-humble-nav-2d-msgs.
- Preparing to unpack .../29-ros-humble-nav-2d-msgs_1.1.3-1jammy.20221110.224153_amd64.deb ...
- Unpacking ros-humble-nav-2d-msgs (1.1.3-1jammy.20221110.224153) ...
- Selecting previously unselected package ros-humble-dwb-msgs.
- Preparing to unpack .../30-ros-humble-dwb-msgs_1.1.3-1jammy.20221110.224320_amd64.deb ...
- Unpacking ros-humble-dwb-msgs (1.1.3-1jammy.20221110.224320) ...
- Selecting previously unselected package ros-humble-nav-2d-utils.
- Preparing to unpack .../31-ros-humble-nav-2d-utils_1.1.3-1jammy.20221207.044652_amd64.deb ...
- Unpacking ros-humble-nav-2d-utils (1.1.3-1jammy.20221207.044652) ...
- Selecting previously unselected package ros-humble-nav2-core.
- Preparing to unpack .../32-ros-humble-nav2-core_1.1.3-1jammy.20221207.051902_amd64.deb ...
- Unpacking ros-humble-nav2-core (1.1.3-1jammy.20221207.051902) ...
- Selecting previously unselected package ros-humble-dwb-core.
- Preparing to unpack .../33-ros-humble-dwb-core_1.1.3-1jammy.20221207.052140_amd64.deb ...
- Unpacking ros-humble-dwb-core (1.1.3-1jammy.20221207.052140) ...
- Selecting previously unselected package ros-humble-dwb-critics.
- Preparing to unpack .../34-ros-humble-dwb-critics_1.1.3-1jammy.20221207.063858_amd64.deb ...
- Unpacking ros-humble-dwb-critics (1.1.3-1jammy.20221207.063858) ...
- Selecting previously unselected package ros-humble-dwb-plugins.
- Preparing to unpack .../35-ros-humble-dwb-plugins_1.1.3-1jammy.20221207.053319_amd64.deb ...
- Unpacking ros-humble-dwb-plugins (1.1.3-1jammy.20221207.053319) ...
- Selecting previously unselected package ros-humble-nav2-amcl.
- Preparing to unpack .../36-ros-humble-nav2-amcl_1.1.3-1jammy.20221207.044549_amd64.deb ...
- Unpacking ros-humble-nav2-amcl (1.1.3-1jammy.20221207.044549) ...
- Selecting previously unselected package ros-humble-nav2-behavior-tree.
- Preparing to unpack .../37-ros-humble-nav2-behavior-tree_1.1.3-1jammy.20221207.044559_amd64.deb ...
- Unpacking ros-humble-nav2-behavior-tree (1.1.3-1jammy.20221207.044559) ...
- Selecting previously unselected package ros-humble-nav2-behaviors.
- Preparing to unpack .../38-ros-humble-nav2-behaviors_1.1.3-1jammy.20221207.052114_amd64.deb ...
- Unpacking ros-humble-nav2-behaviors (1.1.3-1jammy.20221207.052114) ...
- Selecting previously unselected package ros-humble-nav2-bt-navigator.
- Preparing to unpack .../39-ros-humble-nav2-bt-navigator_1.1.3-1jammy.20221207.052119_amd64.deb ...
- Unpacking ros-humble-nav2-bt-navigator (1.1.3-1jammy.20221207.052119) ...
- Selecting previously unselected package ros-humble-nav2-collision-monitor.
- Preparing to unpack .../40-ros-humble-nav2-collision-monitor_1.1.3-1jammy.20221207.051848_amd64.deb ...
- Unpacking ros-humble-nav2-collision-monitor (1.1.3-1jammy.20221207.051848) ...
- Selecting previously unselected package ros-humble-nav2-constrained-smoother.
- Preparing to unpack .../41-ros-humble-nav2-constrained-smoother_1.1.3-1jammy.20221207.052820_amd64.deb ...
- Unpacking ros-humble-nav2-constrained-smoother (1.1.3-1jammy.20221207.052820) ...
- Selecting previously unselected package ros-humble-nav2-controller.
- Preparing to unpack .../42-ros-humble-nav2-controller_1.1.3-1jammy.20221207.052820_amd64.deb ...
- Unpacking ros-humble-nav2-controller (1.1.3-1jammy.20221207.052820) ...
- Selecting previously unselected package ros-humble-nav2-dwb-controller.
- Preparing to unpack .../43-ros-humble-nav2-dwb-controller_1.1.3-1jammy.20221207.064539_amd64.deb ...
- Unpacking ros-humble-nav2-dwb-controller (1.1.3-1jammy.20221207.064539) ...
- Selecting previously unselected package ros-humble-nav2-navfn-planner.
- Preparing to unpack .../44-ros-humble-nav2-navfn-planner_1.1.3-1jammy.20221207.052820_amd64.deb ...
- Unpacking ros-humble-nav2-navfn-planner (1.1.3-1jammy.20221207.052820) ...
- Selecting previously unselected package ros-humble-nav2-planner.
- Preparing to unpack .../45-ros-humble-nav2-planner_1.1.3-1jammy.20221207.052822_amd64.deb ...
- Unpacking ros-humble-nav2-planner (1.1.3-1jammy.20221207.052822) ...
- Selecting previously unselected package ros-humble-nav2-regulated-pure-pursuit-controller.
- Preparing to unpack .../46-ros-humble-nav2-regulated-pure-pursuit-controller_1.1.3-1jammy.20221207.052822_amd64.deb ...
- Unpacking ros-humble-nav2-regulated-pure-pursuit-controller (1.1.3-1jammy.20221207.052822) ...
- Selecting previously unselected package ros-humble-nav2-rotation-shim-controller.
- Preparing to unpack .../47-ros-humble-nav2-rotation-shim-controller_1.1.3-1jammy.20221207.053601_amd64.deb ...
- Unpacking ros-humble-nav2-rotation-shim-controller (1.1.3-1jammy.20221207.053601) ...
- Selecting previously unselected package ros-humble-nav2-rviz-plugins.
- Preparing to unpack .../48-ros-humble-nav2-rviz-plugins_1.1.3-1jammy.20221207.075748_amd64.deb ...
- Unpacking ros-humble-nav2-rviz-plugins (1.1.3-1jammy.20221207.075748) ...
- Selecting previously unselected package ros-humble-nav2-simple-commander.
- Preparing to unpack .../49-ros-humble-nav2-simple-commander_1.1.3-1jammy.20221207.041752_amd64.deb ...
- Unpacking ros-humble-nav2-simple-commander (1.1.3-1jammy.20221207.041752) ...
- Selecting previously unselected package ros-humble-ompl.
- Preparing to unpack .../50-ros-humble-ompl_1.5.2-1jammy.20221108.143845_amd64.deb ...
- Unpacking ros-humble-ompl (1.5.2-1jammy.20221108.143845) ...
- Selecting previously unselected package ros-humble-nav2-smac-planner.
- Preparing to unpack .../51-ros-humble-nav2-smac-planner_1.1.3-1jammy.20221207.052822_amd64.deb ...
- Unpacking ros-humble-nav2-smac-planner (1.1.3-1jammy.20221207.052822) ...
- Selecting previously unselected package ros-humble-nav2-smoother.
- Preparing to unpack .../52-ros-humble-nav2-smoother_1.1.3-1jammy.20221207.052824_amd64.deb ...
- Unpacking ros-humble-nav2-smoother (1.1.3-1jammy.20221207.052824) ...
- Selecting previously unselected package ros-humble-nav2-theta-star-planner.
- Preparing to unpack .../53-ros-humble-nav2-theta-star-planner_1.1.3-1jammy.20221207.052829_amd64.deb ...
- Unpacking ros-humble-nav2-theta-star-planner (1.1.3-1jammy.20221207.052829) ...
- Selecting previously unselected package ros-humble-nav2-velocity-smoother.
- Preparing to unpack .../54-ros-humble-nav2-velocity-smoother_1.1.3-1jammy.20221207.044624_amd64.deb ...
- Unpacking ros-humble-nav2-velocity-smoother (1.1.3-1jammy.20221207.044624) ...
- Selecting previously unselected package ros-humble-nav2-waypoint-follower.
- Preparing to unpack .../55-ros-humble-nav2-waypoint-follower_1.1.3-1jammy.20221207.052825_amd64.deb ...
- Unpacking ros-humble-nav2-waypoint-follower (1.1.3-1jammy.20221207.052825) ...
- Selecting previously unselected package ros-humble-navigation2.
- Preparing to unpack .../56-ros-humble-navigation2_1.1.3-1jammy.20221207.081347_amd64.deb ...
- Unpacking ros-humble-navigation2 (1.1.3-1jammy.20221207.081347) ...
- Selecting previously unselected package ros-humble-slam-toolbox.
- Preparing to unpack .../57-ros-humble-slam-toolbox_2.6.3-1jammy.20221207.075748_amd64.deb ...
- Unpacking ros-humble-slam-toolbox (2.6.3-1jammy.20221207.075748) ...
- Selecting previously unselected package ros-humble-nav2-bringup.
- Preparing to unpack .../58-ros-humble-nav2-bringup_1.1.3-1jammy.20221207.081537_amd64.deb ...
- Unpacking ros-humble-nav2-bringup (1.1.3-1jammy.20221207.081537) ...
- Setting up ros-humble-nav2-velocity-smoother (1.1.3-1jammy.20221207.044624) ...
- Setting up libunwind-dev:amd64 (1.3.2-2build2) ...
- Setting up ros-humble-nav2-simple-commander (1.1.3-1jammy.20221207.041752) ...
- Setting up libgraphblas6:amd64 (6.1.4+dfsg-2) ...
- Setting up ros-humble-nav2-voxel-grid (1.1.3-1jammy.20221207.041245) ...
- Setting up libldl2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-nav2-amcl (1.1.3-1jammy.20221207.044549) ...
- Setting up libmetis5:amd64 (5.1.0.dfsg-7build2) ...
- Setting up libbtf1:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-behaviortree-cpp-v3 (3.8.0-1jammy.20221202.022001) ...
- Setting up libgraphblas-dev:amd64 (6.1.4+dfsg-2) ...
- Setting up ros-humble-nav2-costmap-2d (1.1.3-1jammy.20221207.050306) ...
- Setting up ros-humble-costmap-queue (1.1.3-1jammy.20221207.063710) ...
- Setting up ros-humble-nav-2d-msgs (1.1.3-1jammy.20221110.224153) ...
- Setting up ros-humble-nav2-rviz-plugins (1.1.3-1jammy.20221207.075748) ...
- Setting up ros-humble-ompl (1.5.2-1jammy.20221108.143845) ...
- Setting up libcxsparse3:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up nlohmann-json3-dev (3.10.5-2) ...
- Setting up ros-humble-nav-2d-utils (1.1.3-1jammy.20221207.044652) ...
- Setting up ros-humble-nav2-collision-monitor (1.1.3-1jammy.20221207.051848) ...
- Setting up libgoogle-glog0v5 (0.5.0+really0.4.0-2) ...
- Setting up libsuitesparseconfig5:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up librbio2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-nav2-core (1.1.3-1jammy.20221207.051902) ...
- Setting up libamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libcolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-nav2-theta-star-planner (1.1.3-1jammy.20221207.052829) ...
- Setting up ros-humble-nav2-smac-planner (1.1.3-1jammy.20221207.052822) ...
- Setting up ros-humble-nav2-behavior-tree (1.1.3-1jammy.20221207.044559) ...
- Setting up ros-humble-nav2-planner (1.1.3-1jammy.20221207.052822) ...
- Setting up ros-humble-nav2-bt-navigator (1.1.3-1jammy.20221207.052119) ...
- Setting up ros-humble-nav2-regulated-pure-pursuit-controller (1.1.3-1jammy.20221207.052822) ...
- Setting up ros-humble-nav2-controller (1.1.3-1jammy.20221207.052820) ...
- Setting up ros-humble-nav2-smoother (1.1.3-1jammy.20221207.052824) ...
- Setting up libsliplu1:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libcamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libmongoose2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-dwb-msgs (1.1.3-1jammy.20221110.224320) ...
- Setting up ros-humble-nav2-behaviors (1.1.3-1jammy.20221207.052114) ...
- Setting up ros-humble-nav2-waypoint-follower (1.1.3-1jammy.20221207.052825) ...
- Setting up libklu1:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libccolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libgoogle-glog-dev (0.5.0+really0.4.0-2) ...
- Setting up ros-humble-nav2-navfn-planner (1.1.3-1jammy.20221207.052820) ...
- Setting up ros-humble-nav2-rotation-shim-controller (1.1.3-1jammy.20221207.053601) ...
- Setting up libcholmod3:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libspqr2:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-dwb-core (1.1.3-1jammy.20221207.052140) ...
- Setting up ros-humble-dwb-critics (1.1.3-1jammy.20221207.063858) ...
- Setting up libumfpack5:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up libceres2 (2.0.0+dfsg1-5) ...
- Setting up ros-humble-dwb-plugins (1.1.3-1jammy.20221207.053319) ...
- Setting up libsuitesparse-dev:amd64 (1:5.10.1+dfsg-4build1) ...
- Setting up ros-humble-nav2-dwb-controller (1.1.3-1jammy.20221207.064539) ...
- Setting up libceres-dev (2.0.0+dfsg1-5) ...
- Setting up ros-humble-nav2-constrained-smoother (1.1.3-1jammy.20221207.052820) ...
- Setting up ros-humble-slam-toolbox (2.6.3-1jammy.20221207.075748) ...
- Setting up ros-humble-navigation2 (1.1.3-1jammy.20221207.081347) ...
- Setting up ros-humble-nav2-bringup (1.1.3-1jammy.20221207.081537) ...
- Processing triggers for man-db (2.10.2-1) ...
- Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-joint-trajectory-controller]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- ros-humble-control-toolbox
- The following NEW packages will be installed:
- ros-humble-control-toolbox ros-humble-joint-trajectory-controller
- 0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
- Need to get 280 kB of archives.
- After this operation, 1,170 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-control-toolbox amd64 2.1.2-1jammy.20221202.025253 [65.8 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joint-trajectory-controller amd64 2.15.0-1jammy.20221207.061745 [214 kB]
- Fetched 280 kB in 31s (9,026 B/s)
- Selecting previously unselected package ros-humble-control-toolbox.
- (Reading database ... 185343 files and directories currently installed.)
- Preparing to unpack .../ros-humble-control-toolbox_2.1.2-1jammy.20221202.025253_amd64.deb ...
- Unpacking ros-humble-control-toolbox (2.1.2-1jammy.20221202.025253) ...
- Selecting previously unselected package ros-humble-joint-trajectory-controller.
- Preparing to unpack .../ros-humble-joint-trajectory-controller_2.15.0-1jammy.20221207.061745_amd64.deb ...
- Unpacking ros-humble-joint-trajectory-controller (2.15.0-1jammy.20221207.061745) ...
- Setting up ros-humble-control-toolbox (2.1.2-1jammy.20221202.025253) ...
- Setting up ros-humble-joint-trajectory-controller (2.15.0-1jammy.20221207.061745) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-launch-param-builder]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- ros-humble-launch-param-builder
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 8,308 B of archives.
- After this operation, 64.5 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-launch-param-builder amd64 0.1.1-1jammy.20221207.031000 [8,308 B]
- Fetched 8,308 B in 3s (2,613 B/s)
- Selecting previously unselected package ros-humble-launch-param-builder.
- (Reading database ... 185418 files and directories currently installed.)
- Preparing to unpack .../ros-humble-launch-param-builder_0.1.1-1jammy.20221207.031000_amd64.deb ...
- Unpacking ros-humble-launch-param-builder (0.1.1-1jammy.20221207.031000) ...
- Setting up ros-humble-launch-param-builder (0.1.1-1jammy.20221207.031000) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-position-controllers]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- ros-humble-forward-command-controller
- The following NEW packages will be installed:
- ros-humble-forward-command-controller ros-humble-position-controllers
- 0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
- Need to get 140 kB of archives.
- After this operation, 687 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-forward-command-controller amd64 2.15.0-1jammy.20221207.061802 [120 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-position-controllers amd64 2.15.0-1jammy.20221207.062351 [19.6 kB]
- Fetched 140 kB in 5s (26.2 kB/s)
- Selecting previously unselected package ros-humble-forward-command-controller.
- (Reading database ... 185450 files and directories currently installed.)
- Preparing to unpack .../ros-humble-forward-command-controller_2.15.0-1jammy.20221207.061802_amd64.deb ...
- Unpacking ros-humble-forward-command-controller (2.15.0-1jammy.20221207.061802) ...
- Selecting previously unselected package ros-humble-position-controllers.
- Preparing to unpack .../ros-humble-position-controllers_2.15.0-1jammy.20221207.062351_amd64.deb ...
- Unpacking ros-humble-position-controllers (2.15.0-1jammy.20221207.062351) ...
- Setting up ros-humble-forward-command-controller (2.15.0-1jammy.20221207.061802) ...
- Setting up ros-humble-position-controllers (2.15.0-1jammy.20221207.062351) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-behaviortree-cpp-v3]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- ros-humble-behaviortree-cpp-v3 is already the newest version (3.8.0-1jammy.20221202.022001).
- ros-humble-behaviortree-cpp-v3 set to manually installed.
- 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
- executing command [sudo -H apt-get install -y libqt5svg5-dev]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- libqt5svg5-dev
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 11.1 kB of archives.
- After this operation, 79.9 kB of additional disk space will be used.
- Get:1 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libqt5svg5-dev amd64 5.15.3-1 [11.1 kB]
- Fetched 11.1 kB in 0s (24.4 kB/s)
- Selecting previously unselected package libqt5svg5-dev:amd64.
- (Reading database ... 185521 files and directories currently installed.)
- Preparing to unpack .../libqt5svg5-dev_5.15.3-1_amd64.deb ...
- Unpacking libqt5svg5-dev:amd64 (5.15.3-1) ...
- Setting up libqt5svg5-dev:amd64 (5.15.3-1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-vision-msgs]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- ros-humble-vision-msgs
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 135 kB of archives.
- After this operation, 1,881 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-vision-msgs amd64 4.0.0-2jammy.20221108.172753 [135 kB]
- Fetched 135 kB in 9s (15.7 kB/s)
- Selecting previously unselected package ros-humble-vision-msgs.
- (Reading database ... 185547 files and directories currently installed.)
- Preparing to unpack .../ros-humble-vision-msgs_4.0.0-2jammy.20221108.172753_amd64.deb ...
- Unpacking ros-humble-vision-msgs (4.0.0-2jammy.20221108.172753) ...
- Setting up ros-humble-vision-msgs (4.0.0-2jammy.20221108.172753) ...
- Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-control-msgs]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- ros-humble-control-msgs is already the newest version (4.1.0-1jammy.20221108.173042).
- ros-humble-control-msgs set to manually installed.
- 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
- executing command [sudo -H apt-get install -y ros-humble-joint-state-publisher-gui]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- ros-humble-joint-state-publisher-gui
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 15.5 kB of archives.
- After this operation, 66.6 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joint-state-publisher-gui amd64 2.3.0-1jammy.20221207.043424 [15.5 kB]
- Fetched 15.5 kB in 4s (3,742 B/s)
- Selecting previously unselected package ros-humble-joint-state-publisher-gui.
- (Reading database ... 185898 files and directories currently installed.)
- Preparing to unpack .../ros-humble-joint-state-publisher-gui_2.3.0-1jammy.20221207.043424_amd64.deb ...
- Unpacking ros-humble-joint-state-publisher-gui (2.3.0-1jammy.20221207.043424) ...
- Setting up ros-humble-joint-state-publisher-gui (2.3.0-1jammy.20221207.043424) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-moveit-configs-utils]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following NEW packages will be installed:
- ros-humble-moveit-configs-utils
- 0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
- Need to get 20.6 kB of archives.
- After this operation, 105 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-configs-utils amd64 2.5.4-1jammy.20221207.043730 [20.6 kB]
- Fetched 20.6 kB in 3s (6,650 B/s)
- Selecting previously unselected package ros-humble-moveit-configs-utils.
- (Reading database ... 185921 files and directories currently installed.)
- Preparing to unpack .../ros-humble-moveit-configs-utils_2.5.4-1jammy.20221207.043730_amd64.deb ...
- Unpacking ros-humble-moveit-configs-utils (2.5.4-1jammy.20221207.043730) ...
- Setting up ros-humble-moveit-configs-utils (2.5.4-1jammy.20221207.043730) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-moveit-ros-control-interface]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- ros-humble-moveit-simple-controller-manager
- The following NEW packages will be installed:
- ros-humble-moveit-ros-control-interface
- ros-humble-moveit-simple-controller-manager
- 0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
- Need to get 291 kB of archives.
- After this operation, 1,153 kB of additional disk space will be used.
- Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-simple-controller-manager amd64 2.5.4-1jammy.20221207.065321 [98.3 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-ros-control-interface amd64 2.5.4-1jammy.20221207.065645 [193 kB]
- Fetched 291 kB in 17s (16.9 kB/s)
- Selecting previously unselected package ros-humble-moveit-simple-controller-manager.
- (Reading database ... 185949 files and directories currently installed.)
- Preparing to unpack .../ros-humble-moveit-simple-controller-manager_2.5.4-1jammy.20221207.065321_amd64.deb ...
- Unpacking ros-humble-moveit-simple-controller-manager (2.5.4-1jammy.20221207.065321) ...
- Selecting previously unselected package ros-humble-moveit-ros-control-interface.
- Preparing to unpack .../ros-humble-moveit-ros-control-interface_2.5.4-1jammy.20221207.065645_amd64.deb ...
- Unpacking ros-humble-moveit-ros-control-interface (2.5.4-1jammy.20221207.065645) ...
- Setting up ros-humble-moveit-simple-controller-manager (2.5.4-1jammy.20221207.065321) ...
- Setting up ros-humble-moveit-ros-control-interface (2.5.4-1jammy.20221207.065645) ...
- Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- executing command [sudo -H apt-get install -y ros-humble-moveit-planners-ompl]
- Reading package lists... Done
- Building dependency tree... Done
- Reading state information... Done
- The following additional packages will be installed:
- libomp-14-dev libomp-dev libomp5-14
- Suggested packages:
- libomp-14-doc
- The following NEW packages will be installed:
- libomp-14-dev libomp-dev libomp5-14 ros-humble-moveit-planners-ompl
- 0 upgraded, 4 newly installed, 0 to remove and 0 not upgraded.
- Need to get 1,059 kB of archives.
- After this operation, 10.4 MB of additional disk space will be used.
- Get:1 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libomp5-14 amd64 1:14.0.0-1ubuntu1 [388 kB]
- Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-planners-ompl amd64 2.5.4-1jammy.20221207.072823 [321 kB]
- Get:3 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libomp-14-dev amd64 1:14.0.0-1ubuntu1 [347 kB]
- Get:4 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libomp-dev amd64 1:14.0-55~exp2 [3,074 B]
- Fetched 1,059 kB in 23s (45.7 kB/s)
- Selecting previously unselected package libomp5-14:amd64.
- (Reading database ... 186029 files and directories currently installed.)
- Preparing to unpack .../libomp5-14_1%3a14.0.0-1ubuntu1_amd64.deb ...
- Unpacking libomp5-14:amd64 (1:14.0.0-1ubuntu1) ...
- Selecting previously unselected package libomp-14-dev.
- Preparing to unpack .../libomp-14-dev_1%3a14.0.0-1ubuntu1_amd64.deb ...
- Unpacking libomp-14-dev (1:14.0.0-1ubuntu1) ...
- Selecting previously unselected package libomp-dev:amd64.
- Preparing to unpack .../libomp-dev_1%3a14.0-55~exp2_amd64.deb ...
- Unpacking libomp-dev:amd64 (1:14.0-55~exp2) ...
- Selecting previously unselected package ros-humble-moveit-planners-ompl.
- Preparing to unpack .../ros-humble-moveit-planners-ompl_2.5.4-1jammy.20221207.072823_amd64.deb ...
- Unpacking ros-humble-moveit-planners-ompl (2.5.4-1jammy.20221207.072823) ...
- Setting up libomp5-14:amd64 (1:14.0.0-1ubuntu1) ...
- Setting up libomp-14-dev (1:14.0.0-1ubuntu1) ...
- Setting up libomp-dev:amd64 (1:14.0-55~exp2) ...
- Setting up ros-humble-moveit-planners-ompl (2.5.4-1jammy.20221207.072823) ...
- Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
- Scanning processes...
- Scanning processor microcode...
- Scanning linux images...
-
- Failed to retrieve available kernel versions.
-
- Failed to check for processor microcode upgrades.
-
- No services need to be restarted.
-
- No containers need to be restarted.
-
- No user sessions are running outdated binaries.
-
- No VM guests are running outdated hypervisor (qemu) binaries on this host.
- #All required rosdeps installed successfully
编译功能包: colcon build --symlink-install
记录如下
Finished
依据书中流程,通常不会遇到任何问题。
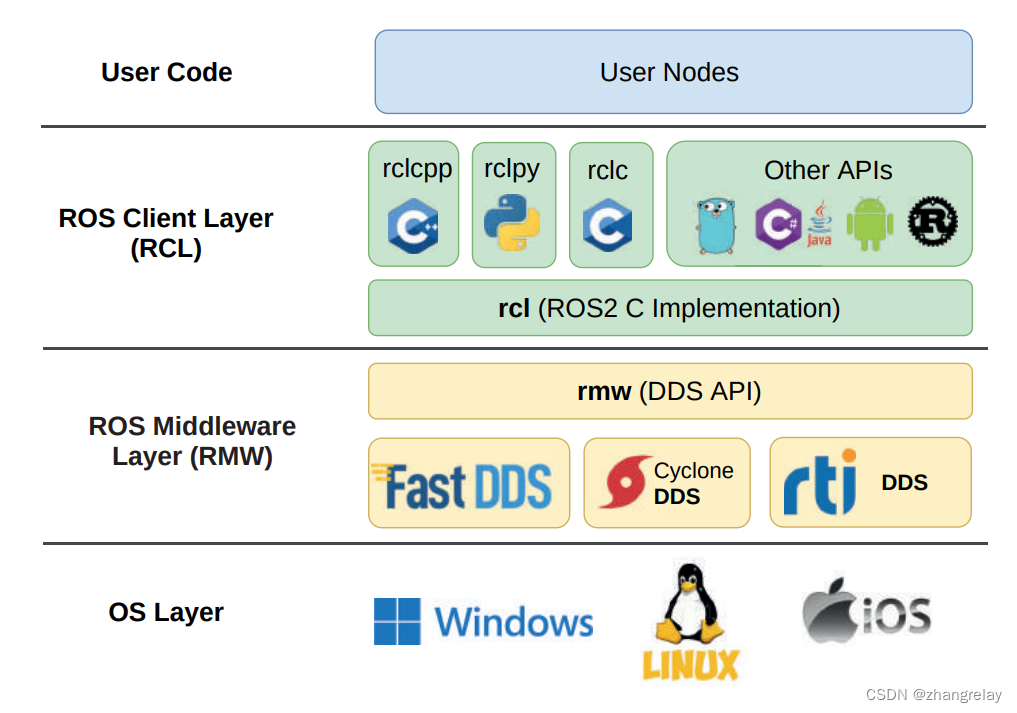
ROS2分层设计如下:
书内容简洁流畅。
推荐阅读
相关标签

