
- 1分布式系统开发实战:Cloud Native架构,Cloud Native特性
- 2探索创新的WebUI文本转视频工具:sd-webui-text2video
- 3九:爬虫-MongoDB基础_爬虫 mongodb
- 4Window Routing and Remote Access 服务(RRAS)无法启动_routing and remote access无法启动
- 5java学到什么程度安卓_自学Android到什么程度才能找到工作?
- 6拦截器与过滤器的区别_过滤器和拦截器
- 7git获取数据提交合并流程_git获取后如何合并
- 8Apache Hadoop概述+Hadoop集群搭建+Hadoop集群启动命令_apahce hdfs启动命令
- 9GitCode Pages: 免费、高速的静态网站托管服务
- 10资料总结分享:数据库篇:设计步骤_数据库设计的步骤
《西门子PLC S7-1200程序实例》:博图V15版本,电气编程者学习借鉴,附机器人TCP/IP通讯与伺服电机控制示例,《西门子PLC S7-1200程序实例》:机器人通讯、伺服控制、开放式通讯、传_博图tcp ip 开放式通讯
赞
踩
西门子PLC S7-1200程序实例,博图版本V15,仅供电气编程者学习借鉴,如有需要也可帮忙代写程序
1,西门子1200与安川机器人TCP/IP通讯,包含机器人GSD文件;
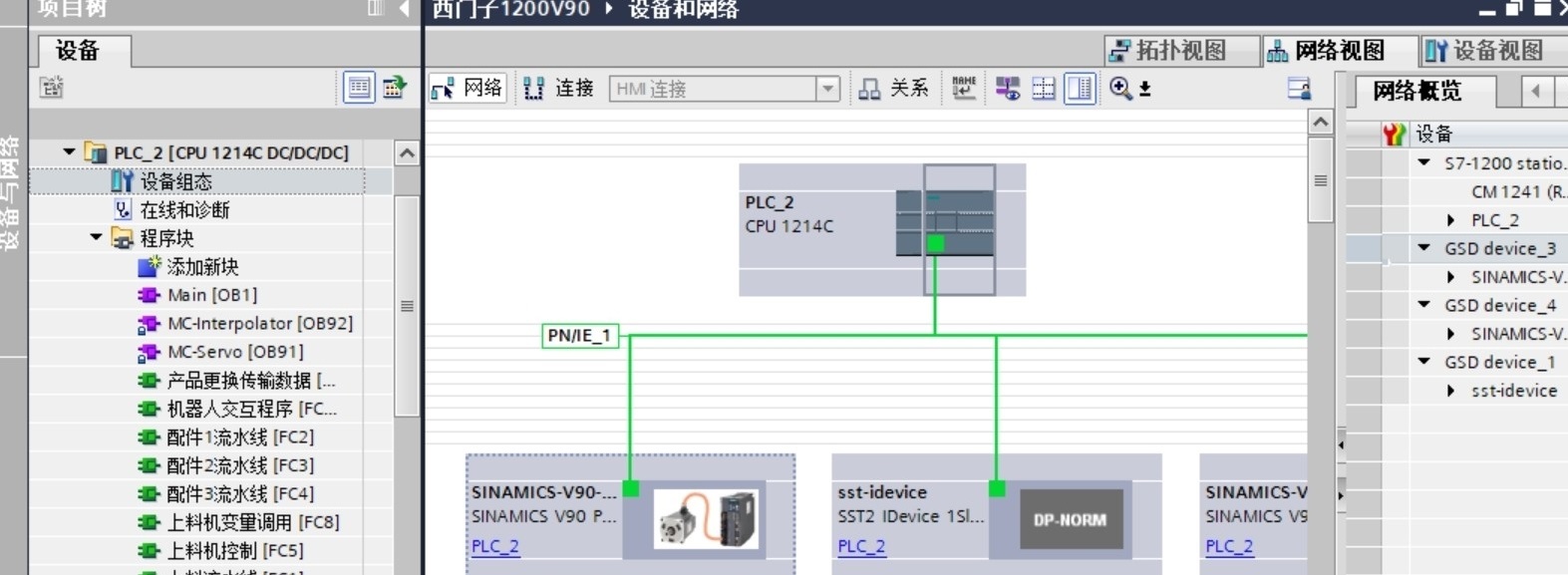
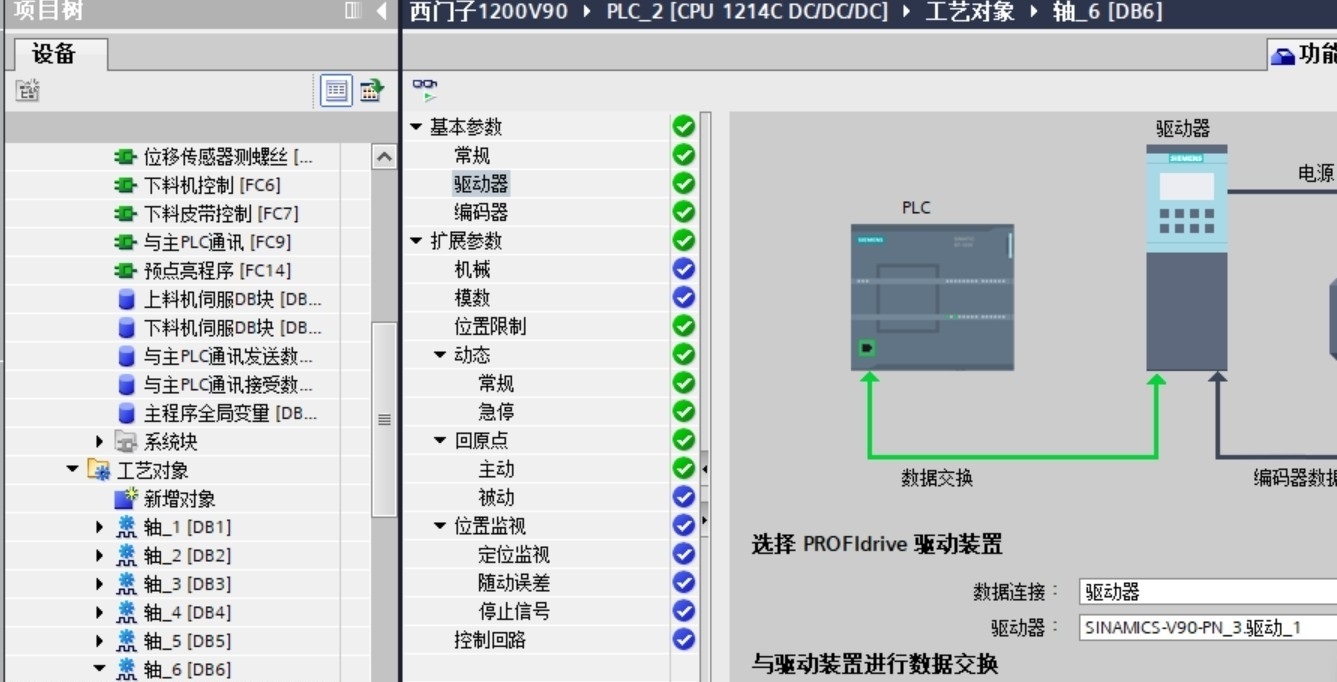
2,西门子1200控制6轴伺服电机,四台台脉冲控制台达B2伺服,两台PN通讯控制西门子V90伺服电机;
3,两台西门子1200开放式通讯交互数据联动;
4,与4台位移传感器modbus485轮询读取参数;
5,本程序为本人自己编写,仅用于学习探讨。
ID:5615667631164687
工控教学

西门子PLC S7-1200程序实例
西门子PLC S7-1200是一款功能强大的可编程逻辑控制器(PLC)。它的博图版本V15提供了丰富的功能和工具,适用于电气编程者进行学习和借鉴。本文将通过几个示例,详细介绍了S7-1200与其他设备之间的通信协议和控制方式。
-
西门子1200与安川机器人TCP/IP通讯
在工业自动化领域,机器人的应用越来越广泛。本文以西门子1200与安川机器人的TCP/IP通讯为例,展示了如何在S7-1200控制器中实现与机器人的数据交换。通过安装机器人的GSD文件,S7-1200能够与机器人建立通信连接,并传输控制指令和接收反馈数据。这种通信方式不仅能够实现实时控制,还能提高生产效率和精度。 -
西门子1200控制6轴伺服电机
伺服电机在自动化控制中扮演着重要角色。本文介绍了如何利用S7-1200控制器控制6轴伺服电机。其中,四台台脉冲控制台达B2伺服电机是通过脉冲信号进行控制。而另外两台PN通讯控制的西门子V90伺服电机则通过PN通讯总线与S7-1200进行数据交换。通过这些控制方式,S7-1200能够高效精确地控制伺服电机的运动,满足自动化生产线的要求。 -
两台西门子1200开放式通讯交互数据联动
在某些场合,多个S7-1200控制器之间需要进行数据交互,共同完成复杂的控制任务。本文以两台S7-1200控制器为例,展示了它们通过开放式通讯协议进行数据联动的实现方式。通过定义好数据交换的格式和规则,两台控制器能够实现数据的互传,实现分布式控制和数据共享。 -
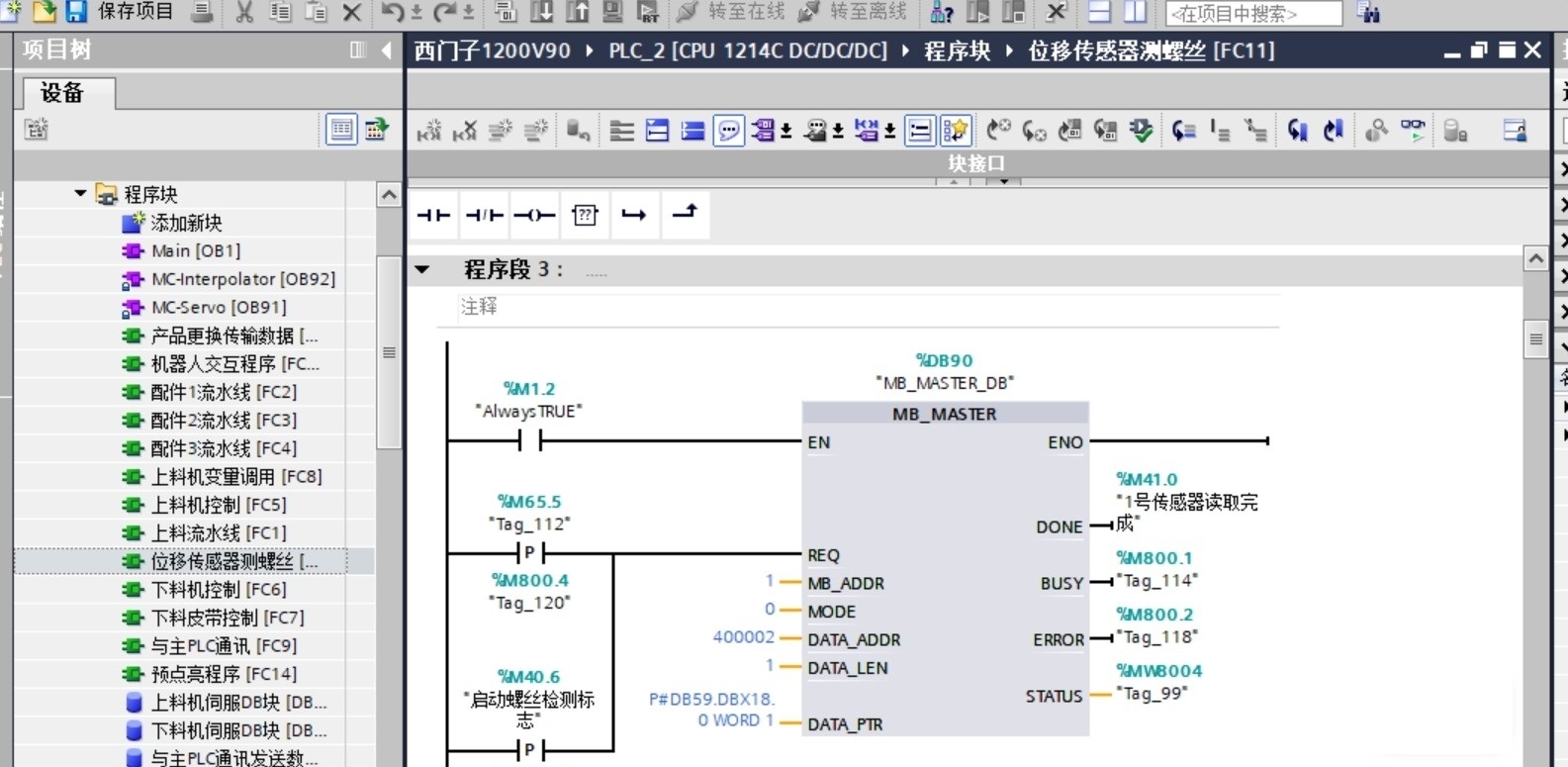
与4台位移传感器modbus485轮询读取参数
位移传感器在工业自动化中常用于测量和监控物体的位置和运动状态。本文介绍了如何利用S7-1200控制器通过modbus485通讯协议,实现对4台位移传感器的轮询读取参数。通过建立与传感器的通信连接,并按照modbus协议规定的格式进行数据传输,S7-1200能够准确获取传感器的测量数据,为后续的控制和决策提供准确的依据。 -
本程序为本人自己编写,仅用于学习探讨
最后,需要强调的是,本文介绍的程序示例是本人自己编写的,仅用于学习和探讨。这些示例展示了S7-1200控制器在不同应用场景下的控制能力和通信功能。通过学习这些示例,电气编程者可以更深入地理解S7-1200的各种功能和应用方法,为实际项目的开发和实施提供参考和借鉴。
在实际应用中,S7-1200控制器具有广泛的适用性,能够满足各种自动化控制需求。本文所示的示例只是冰山一角,实际应用中还有更多的功能和应用方式等待开发者去探索和实践。通过不断学习和实践,电气编程者可以不断提升自己的技术水平,为工业自动化领域的发展贡献自己的力量。
相关的代码,程序地址如下:http://nodep.cn/667631164687.html

