
热门标签
热门文章
- 1【FPGA】SCCB协议+ov5640摄像头_ov5640连接是什么协议fpag
- 2python tensorflow 以图搜图_GitHub - lomoss/SearchImage: 基于VGG16的图像检索系统,简单的以图搜图。...
- 3机器智能的创造力:如何激发AI系统的潜能
- 4《自然语言处理》教学上机实验报告_自然语言处理实验报告
- 5Consul下载与安装_go consul下载
- 6RocketMQ与kafka的区别_kafka与rocketmq区别
- 7国内拉取国外镜像方法_docker拉取国外镜像
- 8ArcGIS的属性表里的shape字段内容(geometry)转换成WKT字符串的方法
- 9深度探索:解锁互联网级检索新范式 —— DeepSeek 探秘之旅
- 10Python 3.12.4 初学安装_python3.12.4安装教程
当前位置: article > 正文
均匀采样信号的鲁棒Savistky-Golay滤波(MATLAB)
作者:我家自动化 | 2024-07-13 18:54:32
赞
踩
均匀采样信号的鲁棒Savistky-Golay滤波(MATLAB)
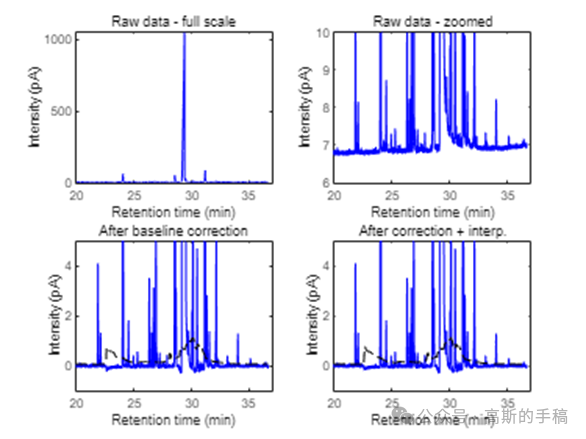
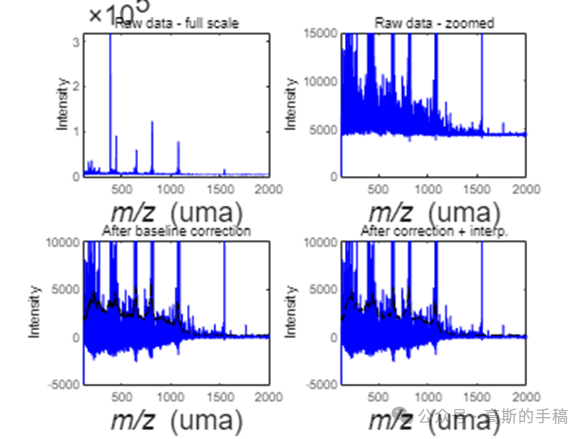
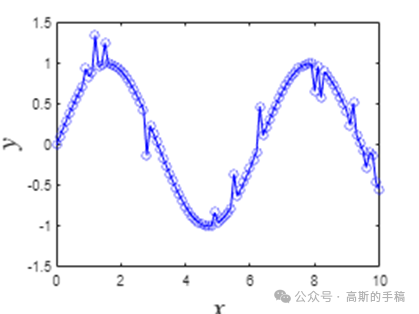
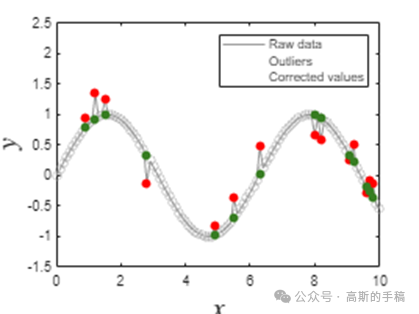
S-G滤波器又称S-G卷积平滑器,它是一种特殊的低通滤波器,用来平滑噪声数据。该滤波器被广泛地运用于信号去噪,采用在时域内基于多项式最小二乘法及窗口移动实现最佳拟合的方法。与通常的滤波器要经过时域-频域-时域变换不同,S-G滤波直接处理时域数据进行平滑,其平滑效果随窗口宽度不同而不同。相对于均值平滑滤波,S-G滤波更能保留相对极大值、极小值和宽度等分布特征。该滤波算法的另一优点是其运算量相对较小,对计算机的内存及数据处理能力要求较低。鉴于此,采用一种鲁棒Savistky-Golay滤波器对均匀采样信号进行降噪平滑,运行环境MATLAB 2021。
-
- for i = 1:step:N
-
- ind1 = max(1,i-half_window) ;
- ind2 = min(N,i+half_window) ;
- y_spl = y_input(ind1:ind2) ;
- x_spl = [ind1:ind2]' ;
- weights = ones(size(y_spl)) ;
- p = inf(order+1,1) ; s = inf ; ds = 1 ; dp = 1 ;
- X = repmat(x_spl,1,order+1).^[order:-1:0] ;
- c = 4.685 ; nb_iter = 0 ;
- while (abs(ds) >= opts.TolFun) || (abs(dp) >= opts.TolX)
- if nb_iter > opts.MaxIter
- break
- end
- nb_iter = nb_iter+1 ;
- old_p = p ;
- p = (sqrt(weights).*X)\(sqrt(weights).*y_spl) ;
-
- y_spl_calc = X*p ;
- r = y_spl_calc-y_spl ;
- tau = median(abs(r-median(r)))/0.6745 ;
- if tau == 0
- s = std(r)*sqrt(1+1/numel(y_spl)+(i-mean(x_spl)).^2/sum((x_spl-mean(x_spl)).^2)) ;
- break
- end
- z = r/tau ;
- weights = (abs(z)<c).*(1-(z/c).^2).^2 ;
- weights = weights.*(weights>=0) ;
- old_s = s ;
- s = std(r,weights)*sqrt(1+1/numel(y_spl)+(i-sum(weights.*x_spl)./sum(weights)).^2/sum((x_spl-sum(weights.*x_spl)./sum(weights)).^2)) ;
- dp = max((old_p-p)./p) ;
- ds = (old_s-s)/s ;
- end
- y3(i,:) = p' ;
- y2(i,1) = s ;
- y1(i,1) = polyval(p,i) ;
-
- end
-
- if y_input_type == "row"
- y1 = y1' ;
- y2 = y2' ;
- x3 = y3' ;
- y_input = y_input' ;
- x_interp = 1:step:N ;
- x_query = 1:N ;
- else
- x_interp = [1:step:N]' ;
- x_query = [1:N]' ;
- end
-
- if step == 1
- % No need for interpolation.
- return
- end
-
- y1 = interp1(x_interp,y1(1:step:N),x_query,opts.Interpolation,"extrap") ;
- y2 = interp1(x_interp,y2(1:step:N),x_query,opts.Interpolation,"extrap") ;
- y3 = interp1(x_interp,y3(1:step:N,:),x_query,opts.Interpolation,"extrap") ;

-
- 工学博士,担任《Mechanical System and Signal Processing》《中国电机工程学报》《控制与决策》等期刊审稿专家,擅长领域:现代信号处理,机器学习,深度学习,数字孪生,时间序列分析,设备缺陷检测、设备异常检测、设备智能故障诊断与健康管理PHM等。
- 代码通过知乎学术咨询获得:https://www.zhihu.com/consult/people/792359672131756032?isMe=1
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/821062
推荐阅读
相关标签

