
- 1大数据学习_finalshell实时查询后台服务器的资源占用情况
- 2分布式执行引擎ray入门--(3)Ray Train
- 3Oracle定时任务(DBMS_Job)详解
- 4uni-app+uniCloud开发微信公众号H5网页如何使用云函数计算jssdk的签名,以及invalid signature 和 realUrl的问题_uniapp realauthurl
- 5python-数据思维_shape指出数组的形状,shape是个元组
- 6MATLAB实现最小二乘法_最小二乘法求一次线性方程matlab
- 7新手分析Python3每日一题_用python给你一个整数数组 nums 和一个整数 k。 如果某个连续子数组中恰好有 k 个
- 8[树状数组]leetcode315:计算右侧小于当前元素的个数(hard)_树状数组位置i左(右)边小于a[i]的个数
- 9随笔记:Python于Windows下初实践,及使用Connector/Python连接MySQL
- 10【从入门到精通】Android稳定性优化深入解析_csdn android稳定性
SLAM代码(三维重建)_三角测量法获得射影重建代码
赞
踩
三维重建的一般步骤
- 特征点对计算基础矩阵。
- 根据基础矩阵计算相机矩阵
- 对于内个点对计算点在3D空间的位置。
The Fundamental Matrix Song
本文主要介绍三维重建的初始值的估计方法(三角测量triangulation)
这样看来三维重建综合了几个问题(包括上述三角测量,以及其他的问题包括基础矩阵估计,),如下图所示
采用光束平差法对射影空间下的多个相机运动矩阵及目标的三维结构进行优化。光束平差法一般在各种重建算法的最后一步使用。这种优化方法的最大特点是可以处理数据丢失情况并提供真正的最大似然估计。但同时,其要求提供一个好的初始值,即首先确定射影空间下的相机运动矩阵和三维结构。采用三角测量法确定目标的射影空间的三维坐标可以得到好的初始值。具体步骤见图2。
其中需要介绍一些基础知识
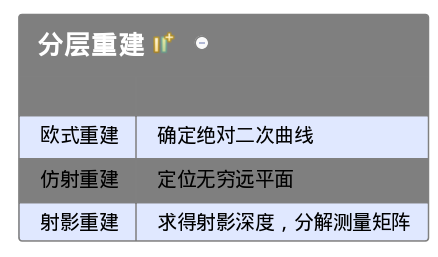
分层重建
- Projective reconstruction
- Affine reconstruction
- Metric reconstruction
如果从图像能获得在景物平面的某个仿射坐标系下的二维射影变换
| Geometry | Reconstruction | content |
|---|---|---|
| Proejction Geometry | 摄影重建 | |
| Affine Geometry | 放射重建 | infinity plane |
| Euclidean Geometry | 欧式重建 | absolute conics |
欧式重建的中已知绝对二次曲线即可恢复欧式几何的全部信息。
三角测量
三角原理的重构结果,是否为空间景物的欧氏结构取决于摄像机所处的世界坐标系。也就是说,如果世界坐标系是欧氏的,则重构结果是空间景物的欧氏结构;否则如果世界坐标系是仿射的(或射影的) ,则重构结果是空间景物的仿射结构(或射影结构) 。
在计算目标相对无人机的位置关系中,使用三角测量方法可以获得相对相机坐标系下目标的三维位置。具体原理如下。
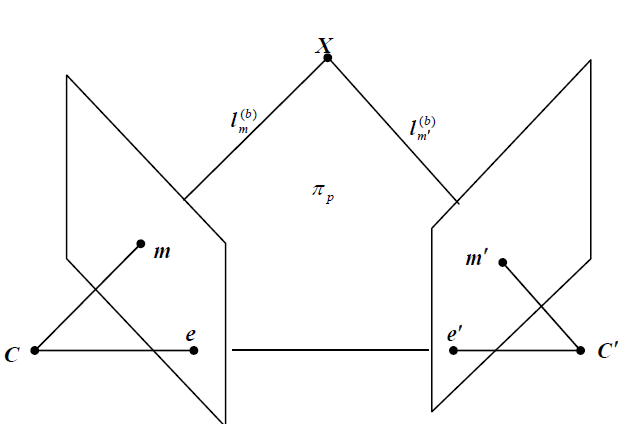
相机在2个对应的位姿下得到个视图的图像。两幅图像在同一世界坐标系下的摄像机矩阵P 和P′,m ↔ m′是两幅图像的一个点对应,即它们满足极几何约束

