
热门标签
热门文章
- 1相见恨晚的 Git 命令动画演示,一看就懂!
- 2pytorch--从零实现一个BERT模型_从0实现bert
- 3LORA的训练与使用_lora 训练
- 4知识蒸馏(Distilling the Knowledge in a Neural Network)论文_知识蒸馏温度t应该多大
- 5C++11新特性(总结)
- 6计算机毕业设计之基于python的地震数据分析与可视化系统的设计与实现_python建立地震事件分类 mapping 表
- 72024年PMP考试时间是什么时候?
- 8ROS2 在VScode搭建c++的编译环境_vscode 配置ros2
- 9这个Python库Streamlit,5分钟内搭建可视化WEB应用_streamlit 原理
- 10MQTT服务器(EMQX)只能发布100条QoS2主题解决办法_emqx qos
当前位置: article > 正文
循迹识别小车:(一)总设计思路_oled与openmv
作者:我家小花儿 | 2024-06-13 22:21:05
赞
踩
oled与openmv
主要使用:
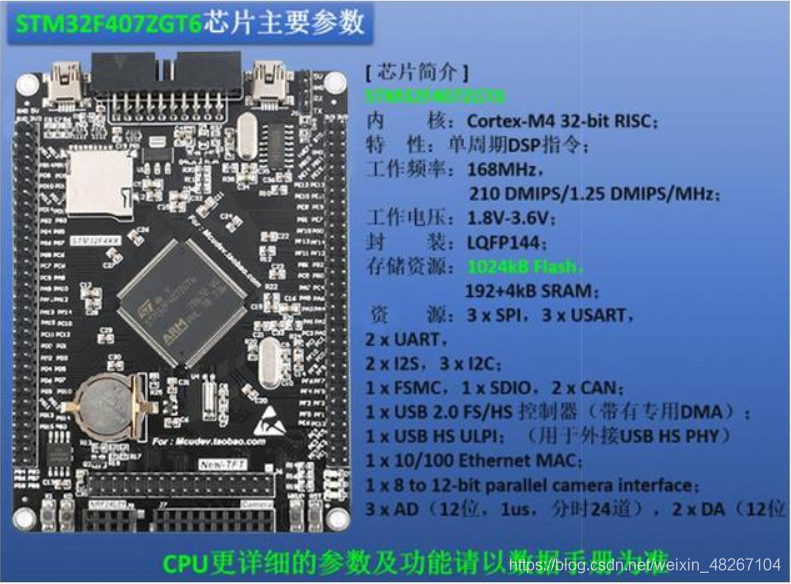
1、单片机STM32F407
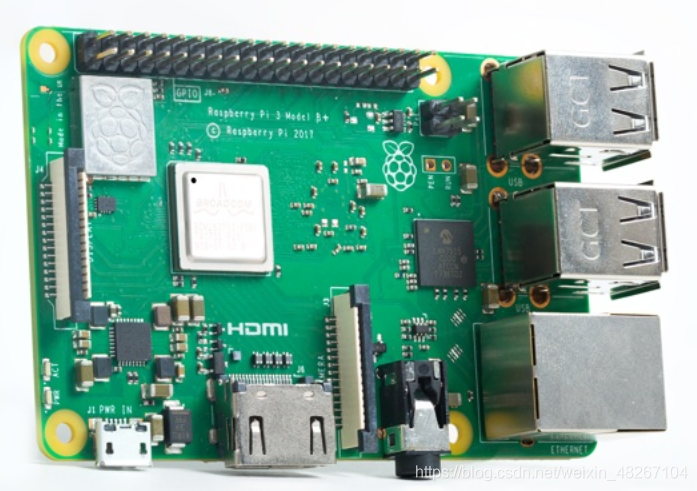
2、树莓派3B+
3、OpenMV4摄像头
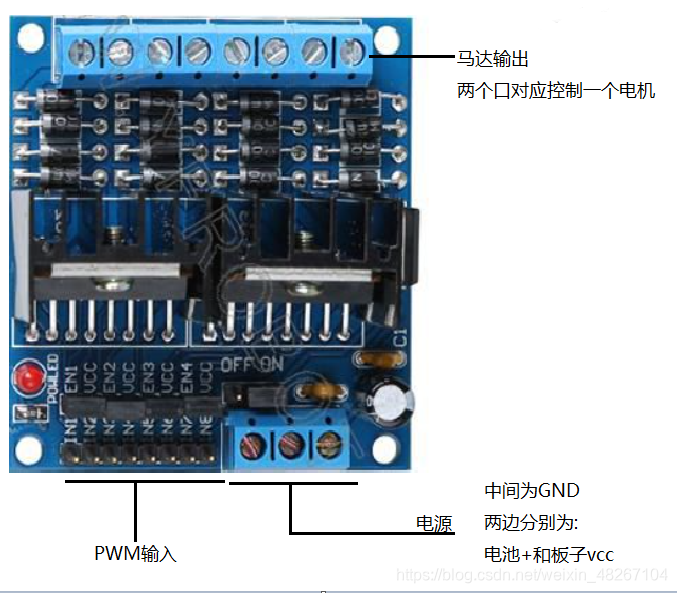
4、L298N四路电机驱动模块
5、OLED屏幕
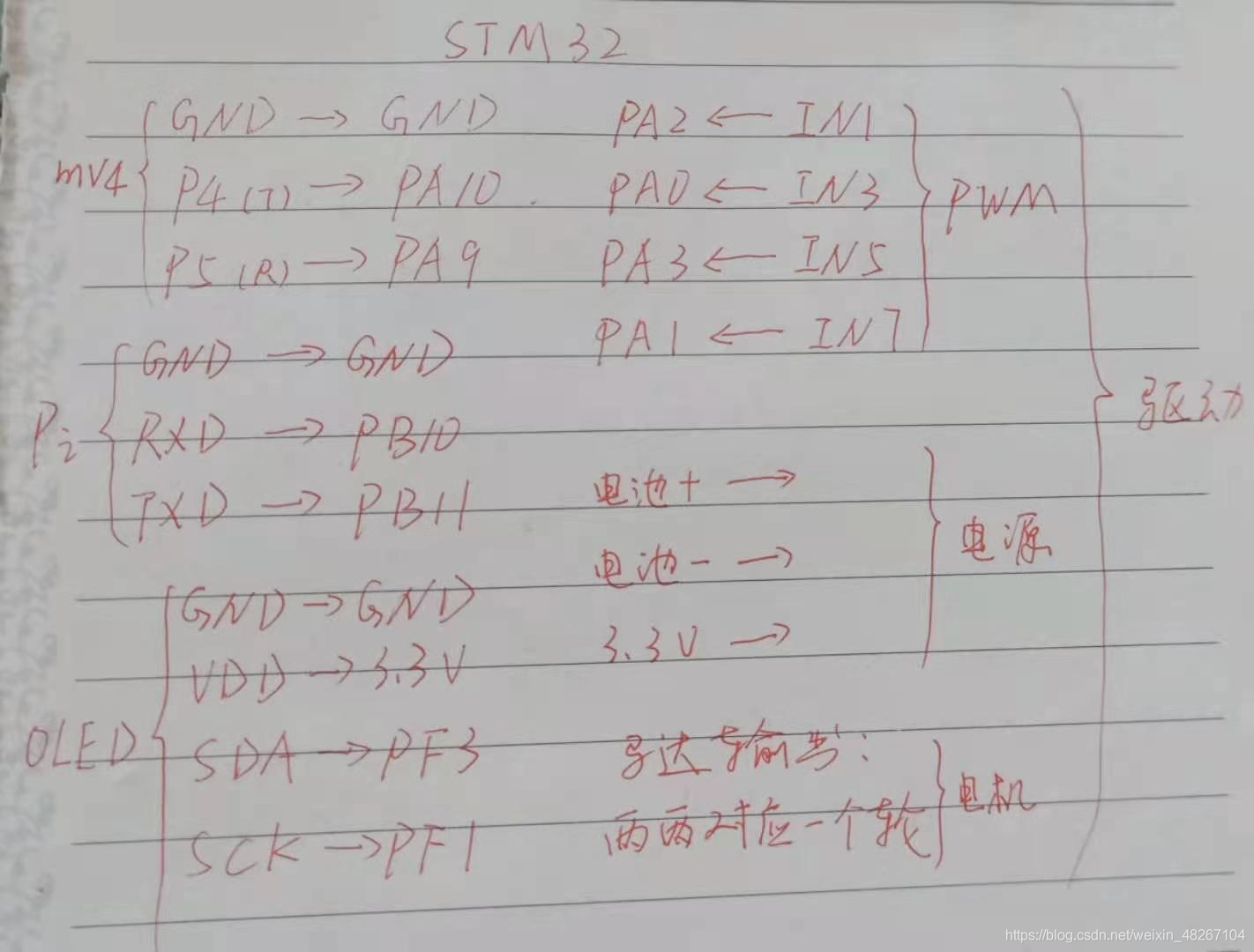
总IO口接线:
各部分功能:
STM32:
作为主控,完成的功能为:
1、控制小车运动:通过STM32输出PWM波给驱动模块进行小车运动状态的控制。
2、与OpenMV4串口通信:实现与OpenMV4的串口收发字符类型数据功能。
3、与树莓派串口通信:实现与树莓派的串口收发字符类型数据功能。
4、OLED屏的显示:让OLED屏能显示表示当前状态的字符。

OpenMV4:
主要完成循迹部分图像数据采集:
1、寻线:OpenMV4摄像头将获得的轨迹进行处理,得到轨迹的一个偏离角度,然后通过偏转角判断给STM32发送左转或右转的信号。
2、停止:MV4通过模板匹配和识别圆双重判断是否目标为圆,如果是则给STM32发出信号来停止小车运动并开始树莓派识别。

树莓派3B+:
通过树莓派上的摄像头模块(Pi Cam)进行目标识别:
树莓派通过颜色识别和形状判断,如果发现绿色的圆,即发现目标,则显示发现目标。
电机驱动和OLED屏:
电机驱动主要通过STM3给的PWM波对小车运动进行控制。
OLED屏主要显示表示当前状态的字符,主要为了能更加清楚当前状态,并进行调试。
资源链接:
总项目文件:下载链接
下一篇文章:循迹识别小车:(二)STM32部分
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/714976
推荐阅读
相关标签

