
- 1druid连接gaussdb的两个不同版本的jar包_druid 高斯数据库
- 2DOA估计 基于互质阵列的DOA估计_互质阵列doa估计中去冗余重新排列
- 3圣诞节礼物之——圣诞节主题的免费屏幕保护程序_waltzingsanta screensaver
- 4python excelwriter修改保存路径_修改python虚拟环境路径
- 5Perl 操作Excel总结_perl 调用excel
- 6android中extends 和implements的区别_android implements
- 7harmonyos与java_鸿蒙(HarmonyOS)开发笔记一:系统简介
- 8LiteOS 知:目录结构_los_hwi.h在什么位置
- 9对抗性攻击和防御竞争(Adversarial Attacks and Defences Competition)的通俗解读_有目标对抗攻击
- 10如何查看docker 项目的配置文件_docker配置在哪里看
STM32 学习笔记2-智能小车循迹实验_智能小车黑线循迹实验报告
赞
踩

特斯拉镇楼
1、什么是小车循迹?
将小车放在黑色跑道上面,小车沿着黑色跑道运动 → 循迹
黑色跑道

2、小车循迹基本原理
原理:
介绍原理之前,突然记起来,在电子爱好者上 做过 一个循迹小车的项目,那个介绍的相相当详细,和这个基本原理是一样的。
光敏电阻:光照作用下, 光敏电阻器的阻值下降。光敏接触(跑道)黑色线时,电阻上升
LM393 比较两路光敏电阻 R13 R14 的大小,不平衡时,控制压线侧电机停止,第二个电机工作,从而修正方向,使黑色跑道线保持在两轮之间。


硬件:
小车底板及附件:支撑,骨架,带四个车辆,前两轮为驱动轮;
可调电位器:10K ,用于调节循迹传感器模块的灵敏度
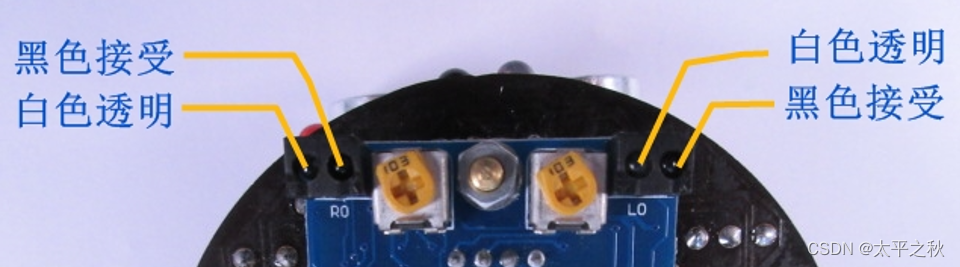
传感部件:2*反射式光电管 ,用于检测跑道black/white

四个引脚分别为:1 Anode 正极 2 cathode 负极 3 Emitter 发射极 4 collector 接收极

驱动:两个直流电机,作用为驱动车轮运动
电源:干电池
控制模块: LM393 & 单片机系统
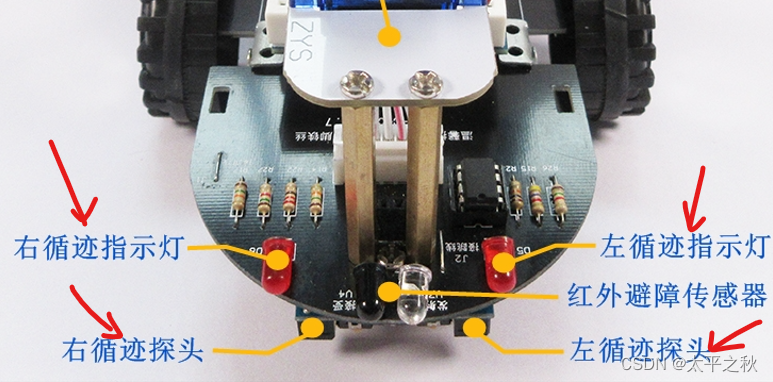
显示模块:LED ,循迹指示灯,当循迹探头检测到黑线,指示灯亮
背面:白色是发射端,黑色是接受端
正面
电路图(基本原理与上面介绍的类似,只不过是把用LM393 检测的结果输出给 单片机)

3、小车循迹代码实现 和 分析
先来看主函数 main.c
- #include "stm32f10x.h" //系统库函数
- #include "delay.h" //延时函数
- #include "motor.h" //电机库函数
- #include "keysacn.h" // 按键函数
- #include "IRSEARCH.h" // 循迹库函数
-
-
- int main(void)
- {
- delay_init(); //延时初始化(在调用延时函数之前,必须先用delay_init()初始化Systick)
- KEY_Init(); // 初始化 调用按键函数
- IRSearchInit(); // 循迹初始化
- TIM4_PWM_Init(7199,0); //初始化 PWM 让电机转起来
- STM32_brake(500); //刹车0.5s
- keysacn();
- while(1)
- {
- SearchRun(); // 循迹函数
- }
- }

初始化延时, delay_init();,在之前的内容已经谈论过啦,不赘述
初始化按键, KEY_Init(); 使用的是 GPIO 外设 ,设置和我的学习笔记0 让小灯亮起来类似
- //按键初始化函数
- //PA15 和PC5 设置为输入
- void KEY_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//使能PORTA PORTC时钟
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;//PC2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置为上拉输入
- GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC2
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //蜂鸣器PC3
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO 50MHz
- GPIO_Init(GPIOC, &GPIO_InitStructure); //设定参数初始化 GPIOC.3
- }
初始化探头,IRSearchInit(); PA7 PB0
- void IRSearchInit(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB , ENABLE);//使能时钟
-
- GPIO_InitStructure.GPIO_Pin = SEARCH_R_PIN;// PA7
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//输入上拉模式
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//端口速度
- GPIO_Init(SEARCH_R_GPIO , &GPIO_InitStructure);
-
- GPIO_InitStructure.GPIO_Pin = SEARCH_L_PIN;// PB0
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//
- GPIO_Init(SEARCH_L_GPIO , &GPIO_InitStructure);
- }
初始化 PWM 电机 配置,见学习笔记1 TIM4_PWM_Init(7199,0);
按键读取程序, keysacn(); 同时程序中加了一个蜂鸣器作为反馈声,被按下时蜂鸣器响
- void keysacn()
- {
- int val;
- val=KEY; //读取按键
- while(!GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2))//当按键没有被按下时,一直循环
- {
- val=KEY;//
- }
- while(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2))//当按键被按下时
- {
- delay_ms(10); //延时10ms
- val=KEY;//读取PC2口电平值赋给Val
- if(val==1) //第二次判断按键是否被按下
- {
- BEEP_SET; //蜂鸣器响
- while(!GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2)) //判断按时是否被松开
- BEEP_RESET; //蜂鸣器停止
- }
- else
- BEEP_RESET;//蜂鸣器停止
- }
- }
蜂鸣器定义函数:怎么让蜂鸣器响起来? 蜂鸣器定义为 PC3
- #ifndef __KEYSACN_H_
- #define __KEYSACN_H_
-
- #include "stm32f10x.h"
-
- void KEY_Init(void);//按键初始化
- void keysacn(void);//按键扫描函数
-
- //蜂鸣器IO口定义
- #define BEEP_PIN GPIO_Pin_3
- #define BEEP_GPIO GPIOC
- #define BEEP_SET GPIO_SetBits(BEEP_GPIO,BEEP_PIN)
- #define BEEP_RESET GPIO_ResetBits(BEEP_GPIO,BEEP_PIN)
-
- //¶ÁÈ¡°´¼ü
- #define KEY GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2)//读取按键0
-
- #endif
下图为示意,实际为 PC.3口为高电平时,蜂鸣器发声,为低电平时,不工作

while(1)
{
SearchRun();
}
SearchRun();
- void SearchRun(void) //循迹控制程序
- {
- if(SEARCH_L_IO == WHITE_AREA && SEARCH_R_IO == WHITE_AREA) //前进控制逻辑
- ctrl_comm = COMM_UP;
- else if (SEARCH_L_IO == BLACK_AREA && SEARCH_R_IO == WHITE_AREA) //左转控制逻辑
- ctrl_comm = COMM_LEFT;
- else if (SEARCH_R_IO == BLACK_AREA & SEARCH_L_IO == WHITE_AREA) //右转控制逻辑
- ctrl_comm = COMM_RIGHT;
- else ctrl_comm = COMM_STOP; //停止
-
- if(ctrl_comm_last != ctrl_comm) // 检测上一次命令为COMM_STOP?
- {
- ctrl_comm_last = ctrl_comm;
- switch(ctrl_comm)
- {
- case COMM_UP: STM32_run(50,10);break; //控制电机
- case COMM_DOWN: STM32_back(50,10);break;
- case COMM_LEFT: STM32_Left(50,10);break;
- case COMM_RIGHT: STM32_Right(50,10);break;
- case COMM_STOP: STM32_brake(10);break;
- default : break;
- }
- }
- }


![[蓝桥杯嵌入式]hal库 stm32 PWM的使用(随时修改占空比,随时修改频率)](https://img-blog.csdnimg.cn/direct/ee42de64b0f14932bd12cd666ec76ff4.png?x-oss-process=image/resize,m_fixed,h_300,image/format,png)

