- 1FPGA 主流芯片选型指导和命名规则(一)_fpga 选型
- 2mysql 数据类型_mysql所有的数据类型列表
- 3C++上位软件通过Snap7开源库访问西门子S7-1200/S7-1500数据块的方法
- 4【OrangePi AIpro】香橙派 AIpro 解锁开发新潜能_香橙派aipro 鸿蒙next
- 5通俗讲解LORA中的跳频和扩频 (转)_lora的频率改变是否要修改天线
- 6GIT使用教程(超详细)_git怎么用
- 7微信小程序webview跳转页面后没有返回按钮以及变向解决H5安卓无法监听popstate问题_webview和小程序 popstate
- 8【工具推荐】MobaXterm远程终端管理工具史上最全攻略,涉及下载、安装、字体等配置、解决中文显示乱码和中文输入乱码、Telnet/ssh/Serial使用说明、高级功能使用技巧等保姆级教程_mobaxterm如何设置中文
- 9python数据写入到excel不同sheet_Python3 pandas库 (32) 将数据写入Excel多个sheet
- 10Python实现的检测web服务器健康状况的小程序_python巡检服务器
创建机器人urdf模型并在rviz中展示(利用roboware studio)_5)创建机器人的urdf文件,在rviz中显示并移动机器人。 详细记录移动机器人模型设计
赞
踩
注:本文利用roboware studio工具建立urdf模型
创建机器人描述功能包
右键单击工作空间catkin_ws/src文件夹,点击新建ROS包,将功能包命名为mrobot_description,如下:
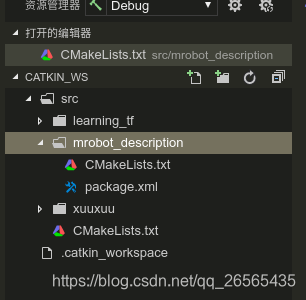
手动添加功能包依赖项,打开CMakeLists.txt文件,如图所示添加urdf、xacro

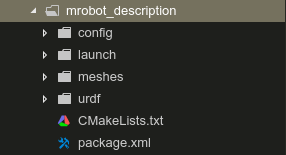
在功能包中新建四个文件夹,分别为
urdf:用于存放机器人模型的urdf或者xacro文件。
meshes:用于放置urdf中引用的模型渲染文件。
launch:用于保存相关启动文件。
config:用于保存rviz的配置文件。
创建机器人底盘描述文件mrobot_chassis.urdf
这个机器人底盘模型有7个link和6个joint。7个link包括1个机器人底板、2个电机、2个驱动轮和2个万向轮;6个joint负责将驱动轮、万向轮、电机安装在底板上,并设置相应的连接方式。
在mrobot_description/urdf文件夹下新建mrobot_chassis.urdf文件,如下:
<?xml version="1.0" ?> <robot name="mrobot_chassis"> <link name="base_link"> <visual> <origin xyz=" 0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.005" radius="0.13"/> </geometry> <material name="yellow"> <color rgba="1 0.4 0 1"/> </material> </visual> </link> <joint name="base_left_motor_joint" type="fixed"> <origin xyz="-0.055 0.075 0" rpy="0 0 0" /> <parent link="base_link"/> <child link="left_motor" /> </joint> <link name="left_motor"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0" /> <geometry> <cylinder radius="0.02" length = "0.08"/> </geometry> <material name="gray"> <color rgba="0.75 0.75 0.75 1"/> </material> </visual> </link> <joint name="left_wheel_joint" type="continuous"> <origin xyz="0 0.0485 0" rpy="0 0 0"/> <parent link="left_motor"/> <child link="left_wheel_link"/> <axis xyz="0 1 0"/> </joint> <link name="left_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0" /> <geometry> <cylinder radius="0.033" length = "0.017"/> </geometry> <material name="white"> <color rgba="1 1 1 0.9"/> </material> </visual> </link> <joint name="base_right_motor_joint" type="fixed"> <origin xyz="-0.055 -0.075 0" rpy="0 0 0" /> <parent link="base_link"/> <child link="right_motor" /> </joint> <link name="right_motor"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0" /> <geometry> <cylinder radius="0.02" length = "0.08" /> </geometry> <material name="gray"> <color rgba="0.75 0.75 0.75 1"/> </material> </visual> </link> <joint name="right_wheel_joint" type="continuous"> <origin xyz="0 -0.0485 0" rpy="0 0 0"/> <parent link="right_motor"/> <child link="right_wheel_link"/> <axis xyz="0 1 0"/> </joint> <link name="right_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0" /> <geometry> <cylinder radius="0.033" length = "0.017"/> </geometry> <material name="white"> <color rgba="1 1 1 0.9"/> </material> </visual> </link> <joint name="front_caster_joint" type="fixed"> <origin xyz="0.1135 0 -0.0165" rpy="0 0 0"/> <parent link="base_link"/> <child link="front_caster_link"/> </joint> <link name="front_caster_link"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0"/> <geometry> <sphere radius="0.0165" /> </geometry> <material name="black"> <color rgba="0 0 0 0.95"/> </material> </visual> </link> </robot>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
在检查并解析新建的urdf文件之前,需要先对工作空间进行编译:
cd ~/catkin_ws
catkin_make
- 1
- 2
urdf提供了一些命令行工具,可以帮助我们检查、梳理模型文件,需要在终端进行独立安装,命令如下:
$ sudo apt-get install liburdfdom-tools
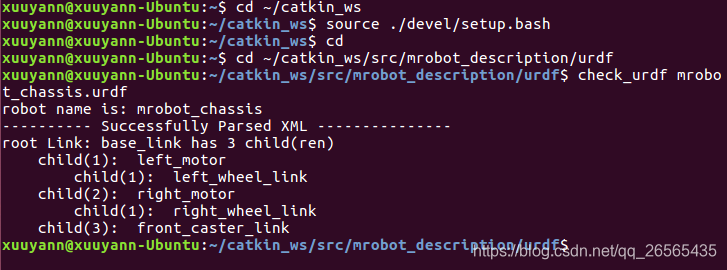
安装完成后,检查并解析上述新建的urdf文件的命令如下(注:在check_urdf命令之前,需要进入urdf所在文件夹):
cd ~/catkin_ws
source ./devel/setup.bash
cd
cd ~/catkin_ws/src/mrobot_description/urdf
check_urdf mrobot_chassis.urdf
- 1
- 2
- 3
- 4
- 5
若一切正常,会出现如下信息
建立launch命令文件
在mrobot_description/launch文件夹下新建display_mrobot_chassis_urdf.launch文件,如下:
<launch>
<param name="robot_description" textfile="$(find mrobot_description)/urdf/mrobot_chassis.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mrobot_description)/config/mrobot_urdf.rviz" required="true" />
</launch>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15

在rviz中显示机器人底盘模型
打开ros,编译一下mrobot_description功能包,然后设置环境变量,运行launch文件,命令如下:
roscore
cd ~/catkin_ws
catkin_make
source ./devel/setup.bash
roslaunch mrobot_description display_mrobot_chassis_urdf.launch
- 1
- 2
- 3
- 4
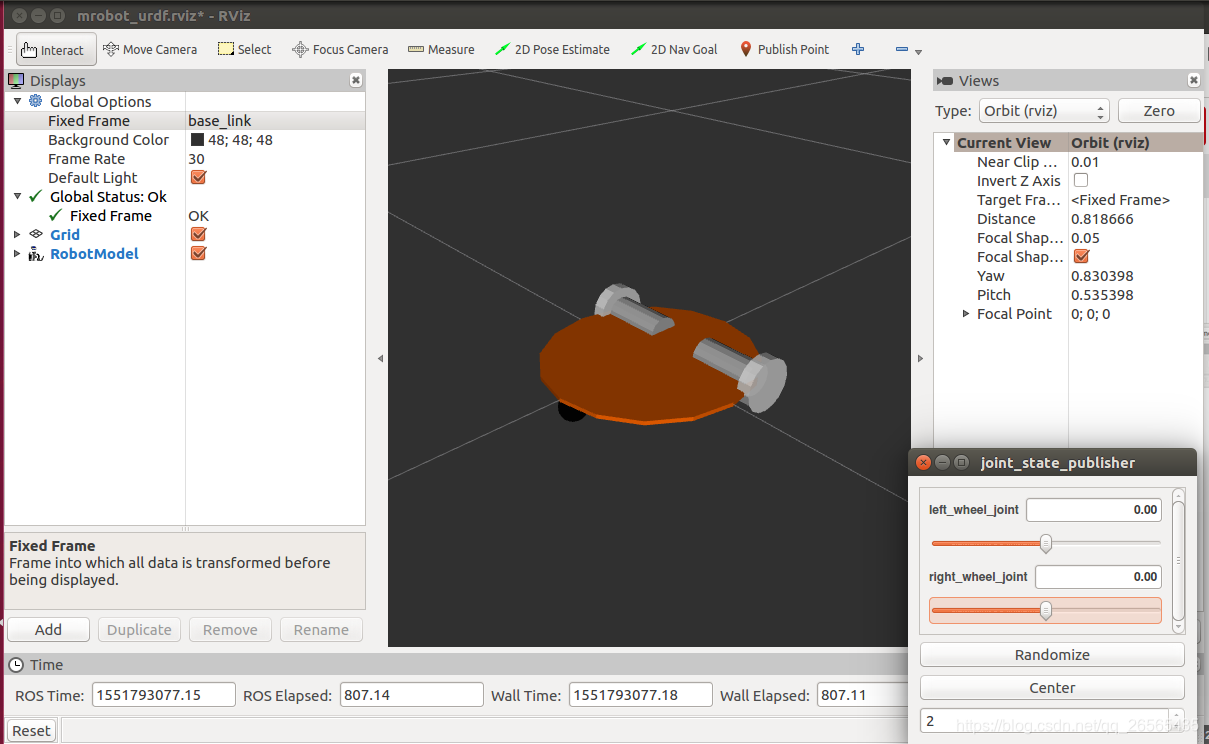
运行成功后,显示如下。这里不仅启动了rviz,还出现了一个叫joint_state_publisher的UI,这是因为我们在启动文件中启动了joint_state_publisher节点,该节点可以发布每个joint(除了fixed)的状态,拖动控制条可以改变轮子的运动状态。
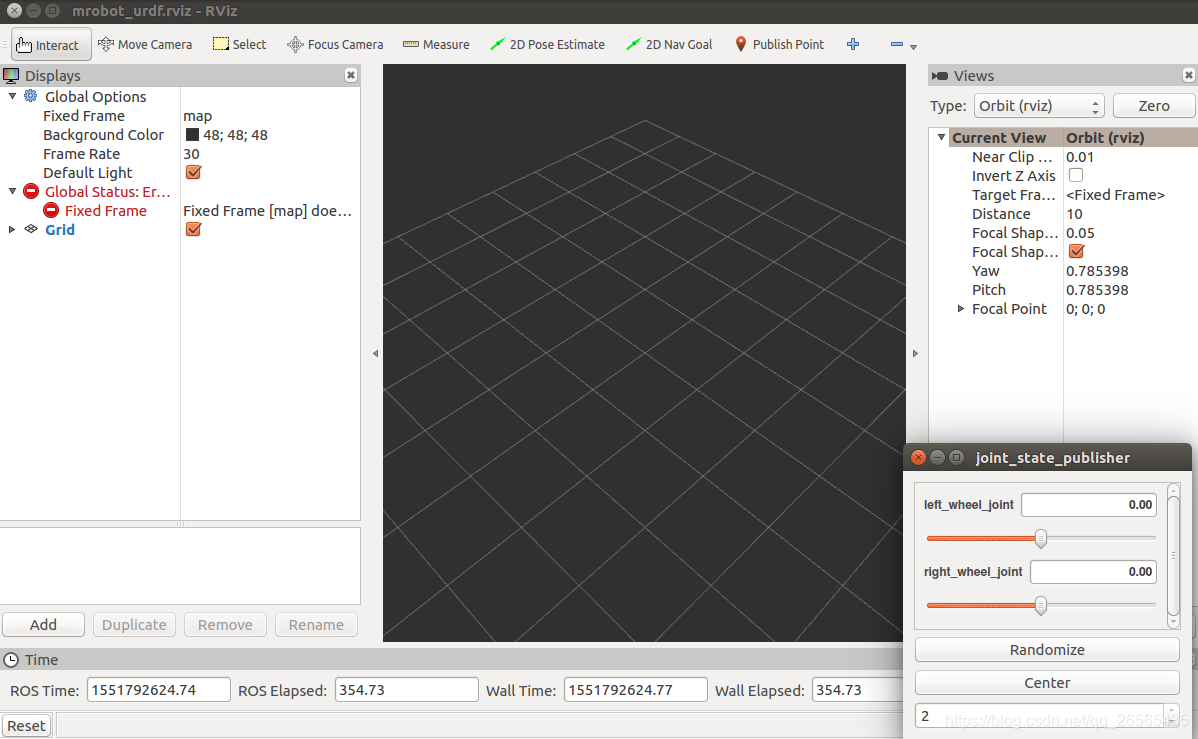
不过此时并没有出现模型,并且还有错误,修改如下:
在Global Options中的Fixed Frame下拉菜单中选择base_link,点击Add选项,添加RobotModel,如图

修改后如下