
热门标签
热门文章
- 1【深度学习】【python】实现受限玻尔兹曼机及跑一遍MINIST 中文注释版_深度玻尔兹曼机 代码
- 2HEIC批量转换JPG_heic格式转化jpg c#
- 3图基本算法_图的基本运算算法
- 4Swin Transformer 代码学习笔记(目标检测)_swin transformer目标检测
- 5高德离线地图开发API_离线地图api哪个好用
- 6算法分析与设计复试总结(二)_计算机复试算法设计
- 7android中xml tools属性详解
- 8从txt文本中导入数据到Hive中_navicat导出txt,load到hive中
- 9从 Embedding 到 Word2Vec_ymaxyj
- 10头歌实验平台-Python-Scrapy爬虫之拉勾网招聘数据分析(第4,5关)_头歌最低薪资柱状图
当前位置: article > 正文
win10下使用vscode无法debug树莓派PICO的问题_openocd: gdb server quit unexpectedly. see gdb-ser
作者:小舞很执着 | 2024-08-15 17:09:22
赞
踩
openocd: gdb server quit unexpectedly. see gdb-server output for more detail
先吐槽一下,百度真是一坨xx,找不到有用的东西。
之前调好的一套pico的debug工具,最近翻出来居然调不通了,不知道遇到了什么问题,搞了两三天时间(本身也不懂这些工具链)
w
发现用不了是因为这么一些原因:
1,使用pico作为调试器调试,需要修改launch.json中的interface配置。之前picoprobe固件配置文件为picoprobe.cfg,最近好像改成DAP了,所以配置文件要和自己用的固件版本对应。最新的固件需要改成cmsis-dap.cfg
"configFiles": [
// This may need to be "interface/picoprobe.cfg" for some previous builds
"interface/cmsis-dap.cfg",
"target/rp2040.cfg"
],
- 1
- 2
- 3
- 4
- 5
2,现象:从GitHub克隆下来的picoprobe工程,在win下编译然后烧录到pico里面,虽然能显示驱动了,但是用openocd是连不上的,显示DAP init failed。
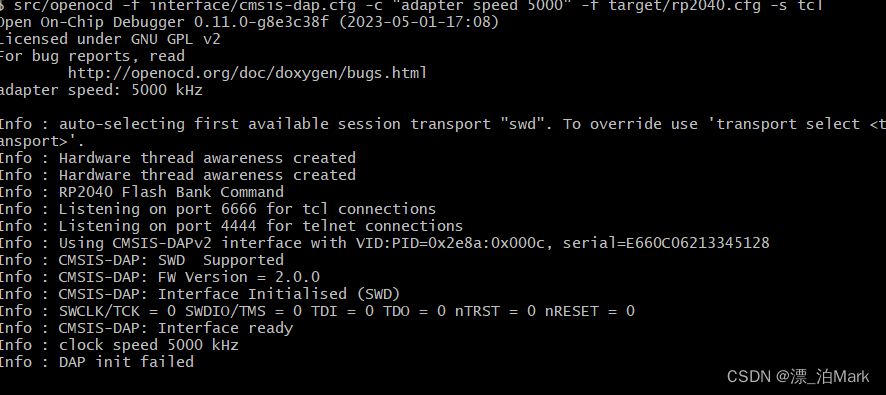
解决方法:用项目中最新realse的.uf2固件就能正常运行,怀疑和编译环境有关。网上搜的结果都是让检查自己的接线,供电问题,实际和这些没有关系。
在github问了一下,是因为作者没有合并到主分支上,后面更新过了,这点应该没有问题了
3,按照官方get_start文件中配置到最后,然后使用vscode debug时,总是显示openocd:GDB Server Quit Unexpectedly.
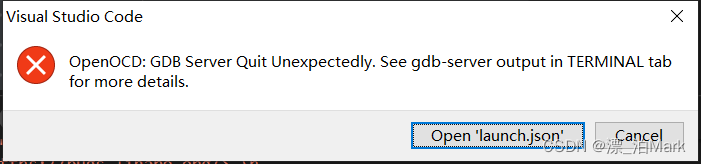
解决方法:在launch.json中加一行,指定一下调试器速度
"openOCDLaunchCommands": [
"adapter speed 10000"
],
- 1
- 2
- 3
完整launch.json文件:
{ "version": "0.2.0", "configurations": [ { "name": "Pico Debug", "cwd": "${workspaceRoot}", "executable": "${command:cmake.launchTargetPath}", "request": "launch", "type": "cortex-debug", "servertype": "openocd", // This may need to be "arm-none-eabi-gdb" for some previous builds "gdbPath" : "arm-none-eabi-gdb", "device" : "RP2040", "searchDir" : [ "你的路径/openocd/tcl" ], "openOCDLaunchCommands": [ "adapter speed 10000" ], "configFiles": [ // This may need to be "interface/picoprobe.cfg" for some previous builds "interface/cmsis-dap.cfg", "target/rp2040.cfg" ], "svdFile": "${env:PICO_SDK_PATH}/src/rp2040/hardware_regs/rp2040.svd", "runToEntryPoint": "main", // Work around for stopping at main on restart "postRestartCommands": [ "break main", "continue" ] } ] }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小舞很执着/article/detail/984522
推荐阅读
相关标签

