
- 1动态规划与回溯:解决复杂问题的方法
- 2数字ic设计笔试知识点(自用)_数字ic基础知识
- 3python 3.10版本安装及环境搭建教程_python3.10
- 4微软2020build大会简评_微软2020 build大会总结 docker
- 5记录一下信创改造遇到的问题_java信创改造
- 6【大模型应用开发-ES】(二)ElasticSearch安装_大模型结合es
- 7OpenCV学习之cv2.getGaussianKernel函数
- 8网络安全成为汽车行业的首要任务_csdn 网络安全 汽车
- 9ES分布式搜索-IK分词器_es 分词切分 ik
- 10微信小程序获取定位、通过地点文本获取经纬度进行导航_qqmapsdk.reversegeocoder
【教程】STM32直流电机PID控制实现,使用STM32F103单片机控制板,配备液晶显示屏,实时显示设定值和实际转数的曲线。采用霍尔传感器检测电机转数,通过PID算法实现位置方式控制,使用PWM脉宽_stm32f103 pwm+pid
赞
踩
STM32直流电机PID控制
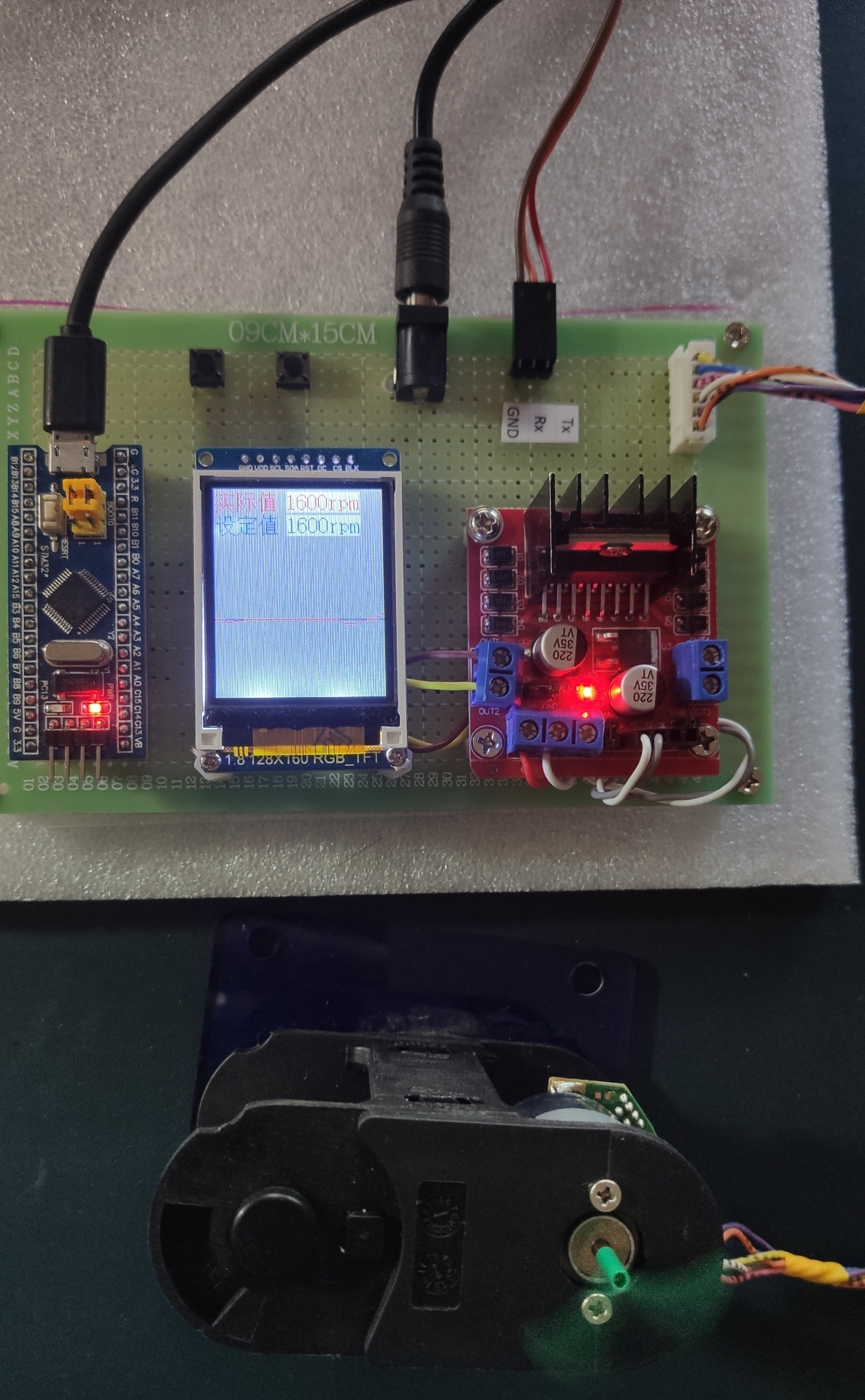
实现功能:直流电机转数PID闭环控制;控制板是stm32f103单片机,板载有液晶显示屏,实时的显示设定值、实际转数的曲线;霍尔传感器检测电机的转数,PID算法使用位置方式,PWM脉宽控制L298N的电压输出,最终实现闭环PID功能。
主要部件:
1:主控制器STM32F130C8T6;
2:128×160液晶显示屏;
3:25GA-260编码器减速电机
是工程文件,说明文档 只是资料
ID:7730674929178248
kzt0992
STM32直流电机PID控制
摘要:
本文介绍了如何使用STM32单片机实现直流电机的PID闭环控制。通过使用STM32F103单片机作为主控制器,配合128×160液晶显示屏和25GA-260编码器减速电机,实现了直流电机转数的实时监测和PID算法的位置控制,从而达到闭环PID控制的目的。
-
引言
直流电机在工业和家庭应用中广泛使用,其转速控制是一项重要的技术。PID控制算法被广泛应用于直流电机转速控制中,具有快速响应、稳定性好等优点。本文将使用STM32F103单片机及相关部件,实现直流电机的PID闭环控制。 -
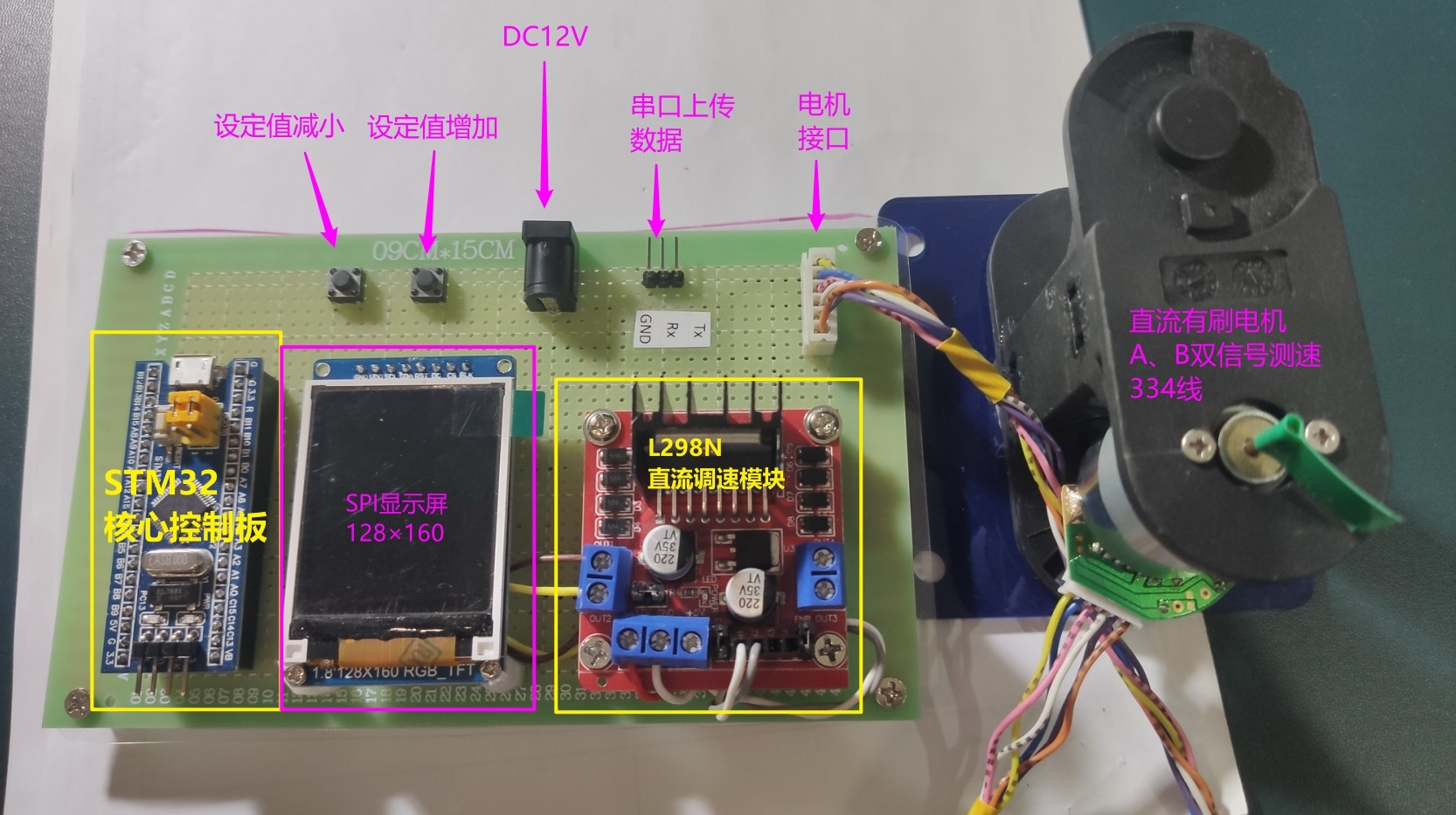
系统硬件设计
本系统的主控制器采用了STM32F103C8T6单片机,具有较强的计算能力和丰富的外设资源。液晶显示屏采用128×160的分辨率,用于实时显示设定值和实际转数的曲线。直流电机采用了25GA-260编码器减速电机,可以提供准确的转数反馈信号。 -
系统软件设计
3.1 PID算法设计
PID算法是Proportional-Integral-Derivative的缩写,通过比例项、积分项和微分项的组合,实现对系统响应速度和稳定性的调节。本系统中,PID算法采用位置方式,通过测量电机的转数差和设定值的差,计算出控制量,从而控制PWM脉宽调节L298N的电压输出。
3.2 系统控制流程设计
系统控制流程包括设定值输入、实际转数测量、PID控制计算以及PWM控制输出等过程。设定值通过液晶显示屏输入,实际转数通过霍尔传感器检测获得,PID控制计算根据当前的转数差和设定值差得到,最终控制PWM脉宽输出,调节电压输出。
-
实验结果与分析
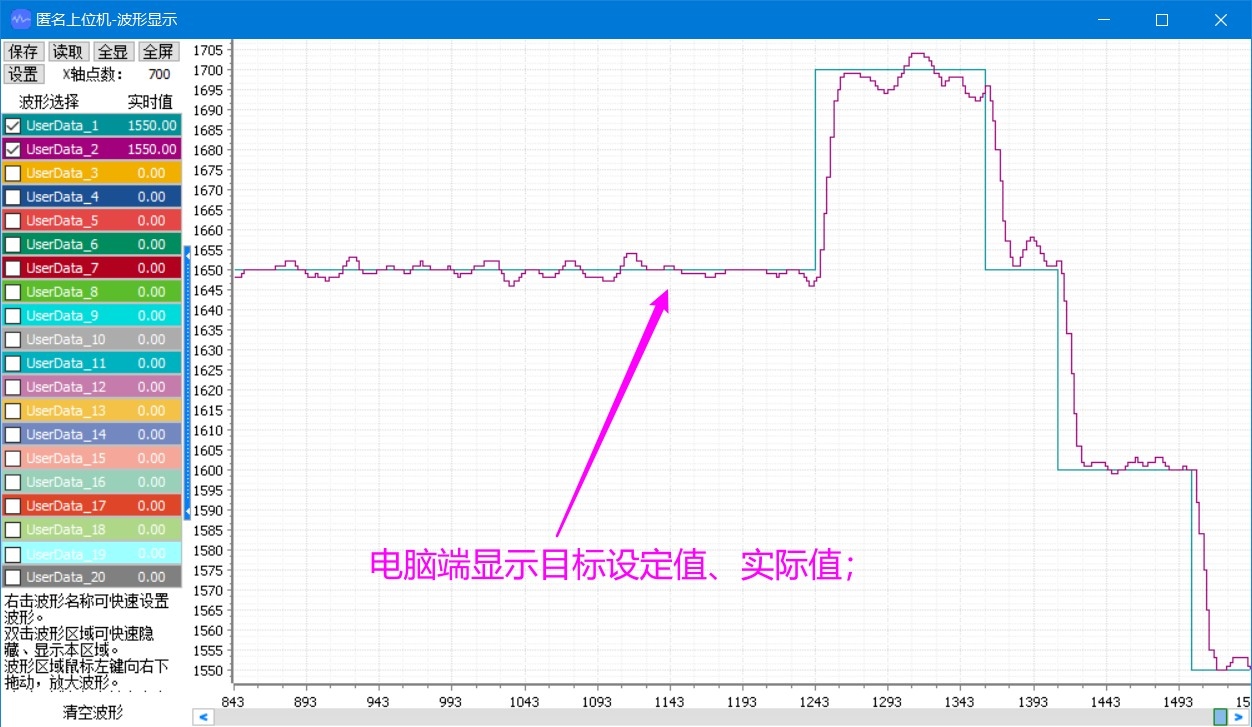
经过实验验证,本系统能够准确地实时显示设定值和实际转数的曲线,并且可根据设定值的变化实现自动调节。PID算法能够快速响应,使电机转数稳定在设定值附近。 -
总结
本文介绍了基于STM32单片机的直流电机PID闭环控制系统设计。通过使用STM32F103单片机作为主控制器,配合液晶显示屏和编码器减速电机,实现了直流电机转数的实时监测和PID算法的位置控制,从而实现了闭环PID控制的目的。实验结果表明,该系统具有较高的稳定性和响应速度,适用于直流电机转速控制等应用场景。
致谢:
感谢本文所用到的STM32F103单片机及相关部件的厂家提供的技术支持和帮助。
参考文献:
[1] STM32F103C8T6 datasheet
[2] L298N datasheet
[3] 直流电机PID控制原理及应用
相关的代码,程序地址如下:http://matup.cn/674929178248.html


