
热门标签
热门文章
- 1SqlServer中创建SqlServer连接服务器_sqlserver建立链接服务器到sqlserver
- 2用Hive+Hadoop集群实现《飞机票购买人群分类案例》思路+代码 (实验数据待整理)_基于hadoop的高铁售票数据分析代码
- 3【深度学习】计算机视觉(五)——卷积神经网络详解
- 4每天50道CISP练习试题_随着信息安全涉及的范围越来越广,各个组织对信息安全管理的需求越来越迫切,越来越
- 5016day(考试题)_盒子内的文本溢出盒子范围,以下选项中可以隐藏溢出文本且不产生滚动条的选项是?
- 6详解Python中的三元运算_python 三元运算
- 7内网穿透(mac,window,linux通用)1分钟实现外网访问电脑本地服务器(1)_内网穿透目前最好的解决方案
- 8计算机视觉三大国际会议ICCV、ECCV、CVPR_eccv含金量
- 9【割点 C++BFS】2556. 二进制矩阵中翻转最多一次使路径不连通
- 10mysql初始化流程_mysql 初始化
当前位置: article > 正文
库卡机器人等待超时后操作程序
作者:小惠珠哦 | 2024-07-16 02:27:08
赞
踩
kuka机器人延时报警程序
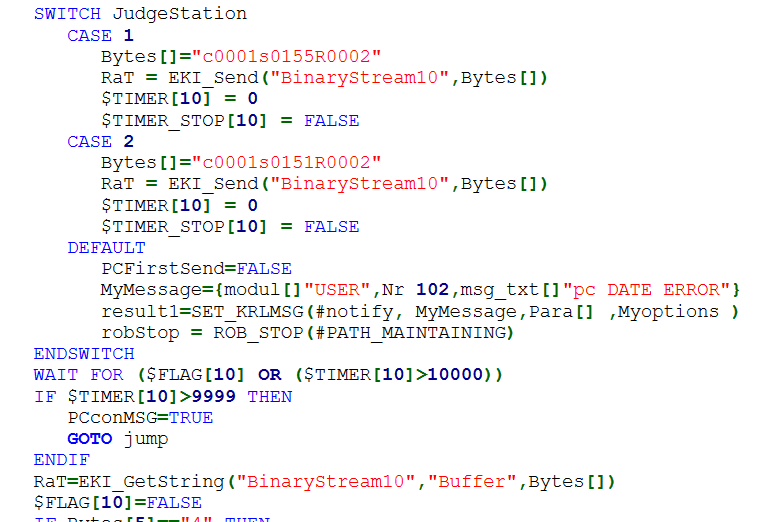
逻辑为机器人在发送数据后进行计时,等待的时间超过设定时候后执行跳转或者报错
- SWITCH JudgeStation
- CASE 1
- Bytes[]="c0001s0155R0002"
- RaT = EKI_Send("BinaryStream10",Bytes[])
- $TIMER[10] = 0
- $TIMER_STOP[10] = FALSE
- CASE 2
- Bytes[]="c0001s0151R0002"
- RaT = EKI_Send("BinaryStream10",Bytes[])
- $TIMER[10] = 0
- $TIMER_STOP[10] = FALSE
- DEFAULT
- PCFirstSend=FALSE
- MyMessage={modul[]"USER",Nr 102,msg_txt[]"pc DATE ERROR"}
- result1=SET_KRLMSG(#notify, MyMessage,Para[] ,Myoptions )
- robStop = ROB_STOP(#PATH_MAINTAINING)
- ENDSWITCH
- WAIT FOR ($FLAG[10] OR ($TIMER[10]>10000))
- IF $TIMER[10]>9999 THEN
- PCconMSG=TRUE
- GOTO jump
- ENDIF

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小惠珠哦/article/detail/831960
推荐阅读
相关标签

