
- 1可以选择不升级鸿蒙,假如鸿蒙系统初期不尽如人意,你是选择继续支持还是直接放弃?...
- 22023最新java学习教程(学习路线+课程大纲+视频教程+面试题+学习工具)_java学习路线及配套视频
- 3Windows下训练PyTorch版YOLOv5并用部署 | 开发者实战_yolov5 模型部署
- 4系统学习Python——装饰器:函数装饰器-[对方法进行装饰:基础知识]
- 5Python中pandas库实现数据缺失值判断isnull()函数_df.isnull().sum()
- 6互联网协议学习笔记_tcp 协议data 18位
- 7Flutter(四)之Flutter的布局Widget_flutter两个控件平分整个宽度
- 8python建立等面积缓冲区_python geom.buffer
- 9OpenAI chatGPT火爆出圈,世界悄悄发生着变化
- 10Spark Executor模块详解
LPA* 路径搜索算法介绍及完整代码_lpa*算法
赞
踩
1.简介
LPA*算法(全称Lifelong Planning A*算法)是由Koenig和Likhachev在2004年提出的,是一种参考人工智能的增量搜索进行改进的A*算法。它被用来处理动态环境下从给定起始点到给定目标点的最短路径问题.
A*算法在此不再赘述, 请参考另一篇文章A* 路径搜索算法介绍及完整代码
2. 算法描述
网上有不少博客详细的介绍了论文中的符号和基本算法逻辑, 如:
终身规划A*算法(LPA*):Lifelong Planning A*
在此就不重复介绍论文中的内容, 只强调几个可能困惑的点:
1) 父节点和子节点
子节点 (successors): 节点s的后续节点集合,代表s可以到达的点.
父节点 (predecessors):节点s的前代节点,代表可以到达s的点.
在论文举例中, 由于是无向图, 所以都指向相邻节点.
2) 论文举例中的h (heuristic) 计算
论文中没有明确列出h值的计算, 从例子中可以看出移动时可以走斜线, 所以相邻点为八个方向:
[(0, 1), (0, -1), (1, 0), (-1, 0), (1, 1), (1, -1), (-1, 1), (-1, -1)]
h值的计算应该取x, y 差值的最大值
h = max(abs(a[0]-b[0]), abs(a[1]-b[1]))3. 伪代码
4. Python代码实现
- import numpy as np
- import matplotlib.pyplot as plt
- from collections import OrderedDict
-
-
- class PriorityQueue:
- def __init__(self):
- self.queue = OrderedDict()
-
- def insert(self, vertex, key):
- self.queue[vertex] = key
- self.queue = OrderedDict(sorted(self.queue.items(), key=lambda kv: (kv[1][0], kv[1][1])))
-
- def popvertex(self):
- first_item = self.queue.popitem(last=False)
- return first_item[0]
-
- def topkey(self):
- if self.queue:
- item = next(iter(self.queue.items()))
- return item[1]
- else:
- return np.inf, np.inf
-
- def remove(self, k):
- if k in self.queue:
- print('(%s, %s) to remove from priority queue' % (k[0], k[1]))
- del self.queue[k]
-
-
- g = dict()
- rhs = dict()
- h = dict()
- U = PriorityQueue()
-
-
- # Eight Directions
- neighbor_direction = [(0, 1), (0, -1), (1, 0), (-1, 0), (1, 1), (1, -1), (-1, 1), (-1, -1)]
- def heuristic(a, b):
- return max(abs(a[0]-b[0]), abs(a[1]-b[1]))
-
-
- # # Four Directions
- # neighbor_direction = [(0, 1), (0, -1), (1, 0), (-1, 0)]
- # def heuristic(a, b):
- # return abs(a[0]-b[0]) + abs(a[1]-b[1])
-
-
- def get_neighbor(current):
- neighbors = list()
- for i, j in neighbor_direction:
- neighbor = current[0] + i, current[1] + j
- if 0 <= neighbor[0] < S.shape[0]:
- if 0 <= neighbor[1] < S.shape[1]:
- if S[neighbor[0]][neighbor[1]] == 1:
- # print('neighbor %s hit wall' % str(neighbor))
- continue
- else:
- # array bound y walls
- # print('neighbor %s hit y walls' % str(neighbor))
- continue
- else:
- # array bound x walls
- # print('neighbor %s hit x walls' % str(neighbor))
- continue
-
- neighbors.append(neighbor)
-
- return neighbors
-
-
- def update_vertex(s):
- print('---update_vertex for (%s, %s)' % (s[0], s[1]))
-
- if s != start:
- neighbors = get_neighbor(s)
- print('(%s, %s) get neighbors:' % (s[0], s[1]))
- print(neighbors)
- neighbor_g_c_s = list()
- for nb in neighbors:
- g_c = g[nb] + heuristic(nb, s)
- neighbor_g_c_s.append(g_c)
- rhs[s] = min(neighbor_g_c_s)
- print('neighbor g_c: %s' % neighbor_g_c_s)
- print(rhs[s])
-
- U.remove(s)
-
- if g[s] != rhs[s]:
- U.insert(s, calculate_key(s))
-
-
- def initialize():
- print('start initialize...')
- for i in range(S.shape[0]):
- for j in range(S.shape[1]):
- if S[(i, j)] != 1:
- g[(i, j)] = np.inf
- rhs[(i, j)] = np.inf
-
- rhs[start] = 0
-
- init_h()
- U.insert(start, (h[start], 0))
- print('Initial U:')
- print(U.queue)
- print('finish initialize...')
-
-
- def init_h():
- S_shape = S.shape
- for i in range(S_shape[0]):
- for j in range(S_shape[1]):
- if S[(i, j)] != 1:
- node = (i, j)
- h_calc = heuristic(node, goal)
- h[node] = h_calc
-
-
- def calculate_key(s):
- return min(g[s], rhs[s]) + h[s], min(g[s], rhs[s])
-
-
- def computer_shortest_path():
- computer_iteration = 1
- while U.topkey() < calculate_key(goal) or rhs[goal] != g[goal]:
- print('----------------Iteration #%d----------------' % computer_iteration)
- u = U.popvertex()
- print('top_vertex (%s, %s)' % (u[0], u[1]))
- if g[u] > rhs[u]:
- print('overconsistent as (%s, %s) g_value %s > rhs_value %s' % (u[0], u[1], g[u], rhs[u]))
- g[u] = rhs[u]
- print('set (%s, %s) g_value %s same as rhs_value %s' % (u[0], u[1], g[u], rhs[u]))
- neighbors = get_neighbor(u)
- for nb in neighbors:
- update_vertex(nb)
- else:
- g[u] = np.inf
- neighbors = get_neighbor(u)
- for nb in neighbors:
- update_vertex(nb)
-
- update_vertex(u)
-
- print(U.queue)
- computer_iteration += 1
-
- print('---exit computer shortest path as reach terminate condition---')
-
-
- def get_path_node():
- path_node = list()
- path_node.append(goal)
-
- current = goal
- while current != start:
- nbs = get_neighbor(current)
- nbs_rhs_dict = OrderedDict()
-
- for nb in nbs:
- nbs_rhs_dict[nb] = rhs[nb]
-
- sorted_nbs_rhs_dict = OrderedDict(sorted(nbs_rhs_dict.items(), key=lambda item: item[1]))
- trace_back_node_rhs = sorted_nbs_rhs_dict.popitem(last=False)
- trace_back_node = trace_back_node_rhs[0]
- path_node.append(trace_back_node)
-
- current = trace_back_node
-
- return path_node
-
-
- if __name__ == '__main__':
- # S = np.array([
- # [1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 1, 0, 1, 1, 1],
- # [0, 0, 1, 0, 1, 1, 1, 0, 0, 1, 0, 0, 1, 1, 0, 1, 0, 0, 0, 0],
- # [1, 0, 0, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 1, 0],
- # [0, 0, 0, 0, 1, 0, 1, 1, 0, 0, 0, 0, 1, 1, 0, 1, 1, 0, 0, 1],
- # [0, 0, 0, 1, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 0, 1, 0, 1, 0, 0],
- # [0, 1, 1, 1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 1, 0, 1, 0, 1],
- # [0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 1, 0, 0],
- # [0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 1],
- # [0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 1, 0, 1, 1, 1, 1, 0, 1],
- # [1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 0, 1, 0, 0, 1, 0, 0],
- # [1, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 1, 1, 0, 0],
- # [0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 1, 0, 1],
- # [1, 0, 0, 0, 0, 1, 0, 1, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0],
- # [0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 0],
- # [1, 0, 0, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 0],
- # ])
- #
- # start = (7, 3)
- # goal = (7, 17)
- # S[(7, 12)] = 1
- # S[(7, 13)] = 1
- # S[(7, 16)] = 1
-
-
- S = np.array([
- [0, 0, 0, 0],
- [1, 0, 1, 0],
- [1, 0, 1, 0],
- [1, 0, 1, 0],
- [1, 0, 1, 0],
- [0, 0, 0, 0],
- ])
- start = (0, 3)
- goal = (5, 0)
-
- # # # test if there is no route
- # # S[(4, 1)] = 1
- # # S[(5, 1)] = 1
-
- # below start run
- initialize()
- computer_shortest_path()
-
- # # --------------------------------------------
- # # this section to test if the environment change
- # print()
- # print()
- # print('--------after update:')
- #
- # # change_point = (3, 1)
- # change_point = (7, 12)
- # S[change_point] = 1
- # g[change_point] = np.inf
- # update_vertex(change_point)
- #
- # print(U.queue)
- # computer_shortest_path()
- # # ----------------------------------------------
-
- if rhs[goal] == np.inf:
- path_exist = False
- else:
- path_exist = True
-
- if path_exist:
- print()
- route = get_path_node()
- print('route:')
- print(route)
-
- plot_map_and_path = True
-
- if plot_map_and_path:
- # plot map and path
- fig, ax = plt.subplots(figsize=(20, 20))
- ax.imshow(S, cmap=plt.cm.Dark2)
-
- ax.scatter(start[1], start[0], marker="o", color="red", s=200)
- ax.scatter(goal[1], goal[0], marker="*", color="green", s=200)
-
- if path_exist:
- # extract x and y coordinates from route list
- x_coords = []
- y_coords = []
-
- for k in (range(0, len(route))):
- x = route[k][0]
- y = route[k][1]
- x_coords.append(x)
- y_coords.append(y)
-
- ax.plot(y_coords, x_coords, color="black")
-
- ax.xaxis.set_ticks(np.arange(0, S.shape[1], 1))
- ax.yaxis.set_ticks(np.arange(0, S.shape[0], 1))
- ax.xaxis.tick_top()
- plt.grid()
- plt.show()

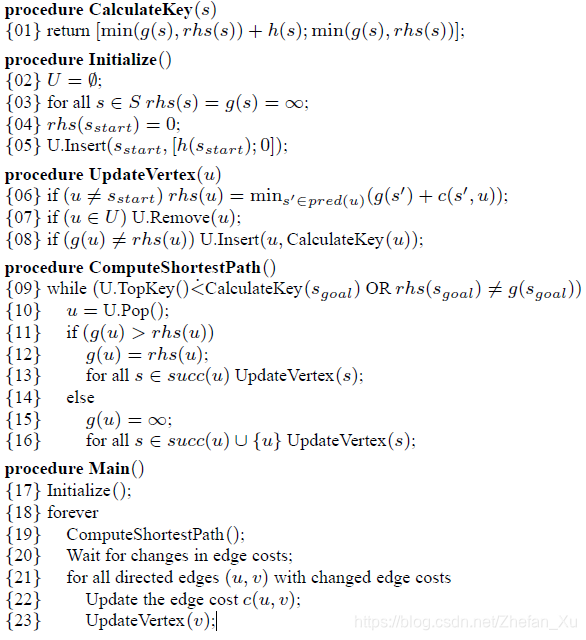
5. 运算结果
以下大约进行大约40多次的迭代
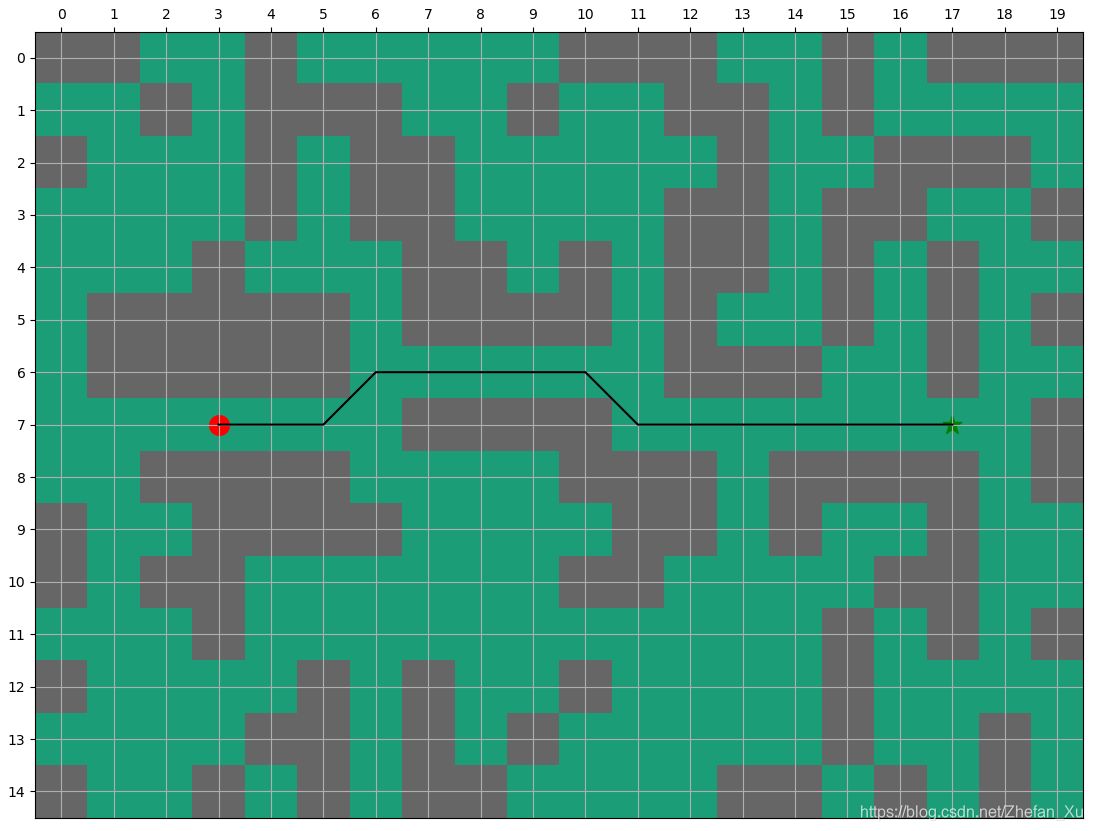
当如论文中所描述环境发生变化, 点(7, 12)有障碍, 如果重新计算大约需要53次迭代.
如果已经计算出环境改变之前的路径, 在此基础上继续计算改变的环境, 则需要大约28次迭代, 可以看出要比重新计算所需要的迭代次数更少.
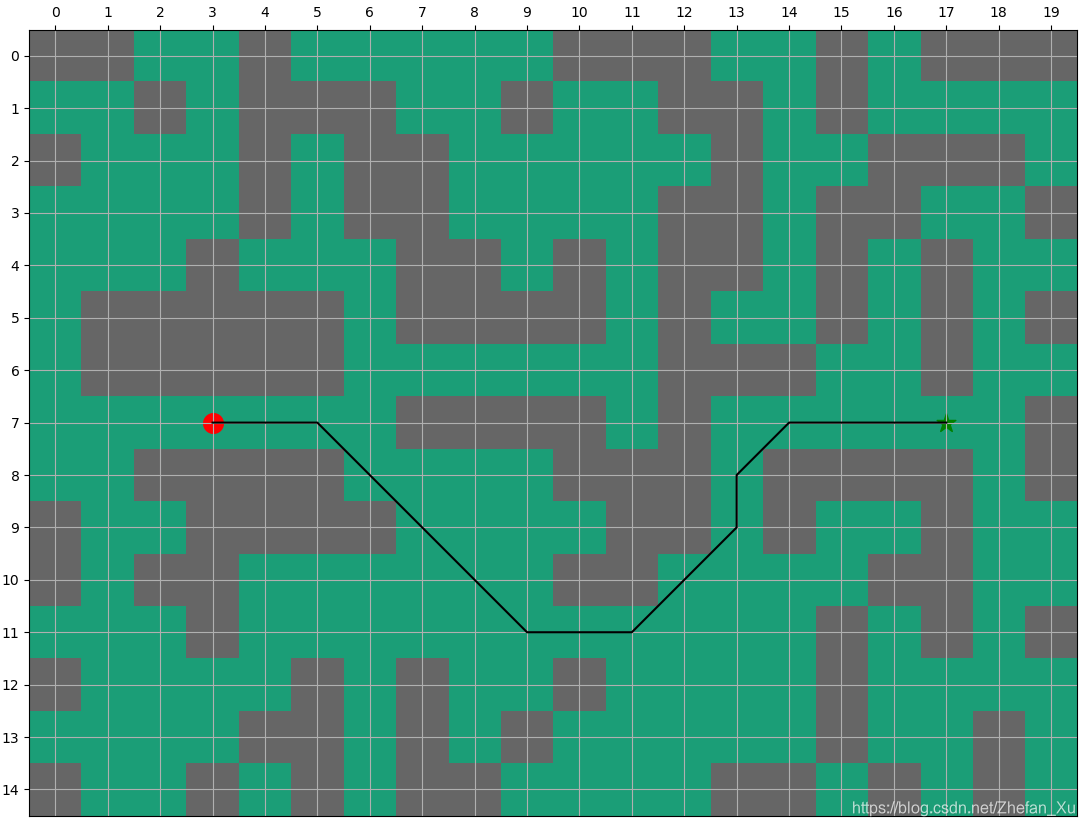
代码中还包含另一个例子, 读者只需要comment掉上图的代码S矩阵, uncomment另一个S矩阵.
同时代码提供了如果只允许向四个方向移动, 不允许斜线的相邻矩阵和h值计算.
6. 算法总结
LPA*算法提供了一种解决动态环境下的最短路径搜索方法,但是它针对的是起始点和目标点固定的情况,相比A*算法, 主要保留了能判断环境变化的rhs值.

