
热门标签
热门文章
- 1软件安全复习材料自用版本_软件安全需求分析和软件需求分析的联系
- 2转载知乎搜索方案_知乎用的什么搜索策略
- 3数据结构-顺序表构建及其基本操作_要求创建一个顺序表类sqlist,该类的构造方法sqlist()即是顺序表的初始化
- 4androidstudion快速导入项目_andtoid studio导入项目
- 5最详细的Java入门完整教程,学Java先收藏了!_java编程入门
- 6Linux Centos解决Python library not found: libpython.so_python library not found: libpython3.12.so, libpyt
- 7一种情况下插入排序比希尔排序要快_希尔一定比插入块吗
- 8win10服务器系统要设置要密码怎么设置,win10系统设置安装软件和运行程序需要输入密码的操作方法...
- 9这种技术,让全世界哑巴都能开口说话 | 精选
- 10c++构造函数中抛出异常的用途和用法_c++ 构造函数抛出异常
当前位置: article > 正文
移植imx6ull开发板的ov5640摄像头_imx6ull 移植ov5640
作者:小丑西瓜9 | 2024-06-13 07:15:31
赞
踩
imx6ull 移植ov5640
前言
记录在正点imx6ull开发板上移植ov5640摄像头遇到的问题
一、驱动部分
NXP提供的内核源码中包含了ov5640的摄像头驱动代码ov5640.c和mx6s_capture.c两个文件,ov5640.c用于初始化摄像头配置,mx6s_capture.c用于捕捉画面
ov5640.c位于linux-imx-rel_imx_4.1.15_2.1.0_ga/drivers/media/paltform/mxc/capture

mx6s_capture.c位于linux-imx-rel_imx_4.1.15_2.1.0_ga/drivers/media/paltform/mxc/capture

我图片中的路径和文字描述不一致时因为我把NXP的源码解压到了其他路径
将编译好的两个驱动模块
 放到板子/lib/modules/4.1.15xxx/路径下(其他路径也可)。
放到板子/lib/modules/4.1.15xxx/路径下(其他路径也可)。

我是nfs挂载了根文件系统,所以放到这个目录
二、应用层源码
直接使用正点提供的源码即可
代码如下:
#include <stdio.h> #include <stdlib.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> #include <sys/ioctl.h> #include <string.h> #include <errno.h> #include <sys/mman.h> #include <linux/videodev2.h> #include <linux/fb.h> #define FB_DEV "/dev/fb0" //LCD设备节点 #define FRAMEBUFFER_COUNT 3 //帧缓冲数量 /*** 摄像头像素格式及其描述信息 ***/ typedef struct camera_format { unsigned char description[32]; //字符串描述信息 unsigned int pixelformat; //像素格式 } cam_fmt; /*** 描述一个帧缓冲的信息 ***/ typedef struct cam_buf_info { unsigned short *start; //帧缓冲起始地址 unsigned long length; //帧缓冲长度 } cam_buf_info; static int width; //LCD宽度 static int height; //LCD高度 static unsigned short *screen_base = NULL;//LCD显存基地址 static int fb_fd = -1; //LCD设备文件描述符 static int v4l2_fd = -1; //摄像头设备文件描述符 static cam_buf_info buf_infos[FRAMEBUFFER_COUNT]; static cam_fmt cam_fmts[10]; static int frm_width, frm_height; //视频帧宽度和高度 static int fb_dev_init(void) { struct fb_var_screeninfo fb_var = {0}; struct fb_fix_screeninfo fb_fix = {0}; unsigned long screen_size; /* 打开framebuffer设备 */ fb_fd = open(FB_DEV, O_RDWR); if (0 > fb_fd) { fprintf(stderr, "open error: %s: %s\n", FB_DEV, strerror(errno)); return -1; } /* 获取framebuffer设备信息 */ ioctl(fb_fd, FBIOGET_VSCREENINFO, &fb_var); ioctl(fb_fd, FBIOGET_FSCREENINFO, &fb_fix); screen_size = fb_fix.line_length * fb_var.yres; width = fb_var.xres; height = fb_var.yres; /* 内存映射 */ screen_base = mmap(NULL, screen_size, PROT_READ | PROT_WRITE, MAP_SHARED, fb_fd, 0); if (MAP_FAILED == (void *)screen_base) { perror("mmap error"); close(fb_fd); return -1; } /* LCD背景刷白 */ memset(screen_base, 0xFF, screen_size); return 0; } static int v4l2_dev_init(const char *device) { struct v4l2_capability cap = {0}; /* 打开摄像头 */ v4l2_fd = open(device, O_RDWR); if (0 > v4l2_fd) { fprintf(stderr, "open error: %s: %s\n", device, strerror(errno)); return -1; } /* 查询设备功能 */ ioctl(v4l2_fd, VIDIOC_QUERYCAP, &cap); /* 判断是否是视频采集设备 */ if (!(V4L2_CAP_VIDEO_CAPTURE & cap.capabilities)) { fprintf(stderr, "Error: %s: No capture video device!\n", device); close(v4l2_fd); return -1; } return 0; } static void v4l2_enum_formats(void) { struct v4l2_fmtdesc fmtdesc = {0}; /* 枚举摄像头所支持的所有像素格式以及描述信息 */ fmtdesc.index = 0; fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FMT, &fmtdesc)) { // 将枚举出来的格式以及描述信息存放在数组中 cam_fmts[fmtdesc.index].pixelformat = fmtdesc.pixelformat; strcpy(cam_fmts[fmtdesc.index].description, fmtdesc.description); fmtdesc.index++; } } static void v4l2_print_formats(void) { struct v4l2_frmsizeenum frmsize = {0}; struct v4l2_frmivalenum frmival = {0}; int i; frmsize.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; frmival.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; for (i = 0; cam_fmts[i].pixelformat; i++) { printf("format<0x%x>, description<%s>\n", cam_fmts[i].pixelformat, cam_fmts[i].description); /* 枚举出摄像头所支持的所有视频采集分辨率 */ frmsize.index = 0; frmsize.pixel_format = cam_fmts[i].pixelformat; frmival.pixel_format = cam_fmts[i].pixelformat; while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMESIZES, &frmsize)) { printf("size<%d*%d> ", frmsize.discrete.width, frmsize.discrete.height); frmsize.index++; /* 获取摄像头视频采集帧率 */ frmival.index = 0; frmival.width = frmsize.discrete.width; frmival.height = frmsize.discrete.height; while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMEINTERVALS, &frmival)) { printf("<%dfps>", frmival.discrete.denominator / frmival.discrete.numerator); frmival.index++; } printf("\n"); } printf("\n"); } } static int v4l2_set_format(void) { struct v4l2_format fmt = {0}; struct v4l2_streamparm streamparm = {0}; /* 设置帧格式 */ fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//type类型 fmt.fmt.pix.width = width; //视频帧宽度 fmt.fmt.pix.height = height;//视频帧高度 fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RGB565; //像素格式 if (0 > ioctl(v4l2_fd, VIDIOC_S_FMT, &fmt)) { fprintf(stderr, "ioctl error: VIDIOC_S_FMT: %s\n", strerror(errno)); return -1; } /*** 判断是否已经设置为我们要求的RGB565像素格式 如果没有设置成功表示该设备不支持RGB565像素格式 */ if (V4L2_PIX_FMT_RGB565 != fmt.fmt.pix.pixelformat) { fprintf(stderr, "Error: the device does not support RGB565 format!\n"); return -1; } frm_width = fmt.fmt.pix.width; //获取实际的帧宽度 frm_height = fmt.fmt.pix.height;//获取实际的帧高度 printf("视频帧大小<%d * %d>\n", frm_width, frm_height); /* 获取streamparm */ streamparm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; ioctl(v4l2_fd, VIDIOC_G_PARM, &streamparm); /** 判断是否支持帧率设置 **/ if (V4L2_CAP_TIMEPERFRAME & streamparm.parm.capture.capability) { streamparm.parm.capture.timeperframe.numerator = 1; streamparm.parm.capture.timeperframe.denominator = 30;//30fps if (0 > ioctl(v4l2_fd, VIDIOC_S_PARM, &streamparm)) { fprintf(stderr, "ioctl error: VIDIOC_S_PARM: %s\n", strerror(errno)); return -1; } } return 0; } static int v4l2_init_buffer(void) { struct v4l2_requestbuffers reqbuf = {0}; struct v4l2_buffer buf = {0}; /* 申请帧缓冲 */ reqbuf.count = FRAMEBUFFER_COUNT; //帧缓冲的数量 reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; reqbuf.memory = V4L2_MEMORY_MMAP; if (0 > ioctl(v4l2_fd, VIDIOC_REQBUFS, &reqbuf)) { fprintf(stderr, "ioctl error: VIDIOC_REQBUFS: %s\n", strerror(errno)); return -1; } /* 建立内存映射 */ buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) { ioctl(v4l2_fd, VIDIOC_QUERYBUF, &buf); buf_infos[buf.index].length = buf.length; buf_infos[buf.index].start = mmap(NULL, buf.length, PROT_READ | PROT_WRITE, MAP_SHARED, v4l2_fd, buf.m.offset); if (MAP_FAILED == buf_infos[buf.index].start) { perror("mmap error"); return -1; } } /* 入队 */ for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) { if (0 > ioctl(v4l2_fd, VIDIOC_QBUF, &buf)) { fprintf(stderr, "ioctl error: VIDIOC_QBUF: %s\n", strerror(errno)); return -1; } } return 0; } static int v4l2_stream_on(void) { /* 打开摄像头、摄像头开始采集数据 */ enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE; if (0 > ioctl(v4l2_fd, VIDIOC_STREAMON, &type)) { fprintf(stderr, "ioctl error: VIDIOC_STREAMON: %s\n", strerror(errno)); return -1; } return 0; } static void v4l2_read_data(void) { struct v4l2_buffer buf = {0}; unsigned short *base; unsigned short *start; int min_w, min_h; int j; if (width > frm_width) min_w = frm_width; else min_w = width; if (height > frm_height) min_h = frm_height; else min_h = height; buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; for ( ; ; ) { for(buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) { ioctl(v4l2_fd, VIDIOC_DQBUF, &buf); //出队 for (j = 0, base=screen_base, start=buf_infos[buf.index].start; j < min_h; j++) { memcpy(base, start, min_w * 2); //RGB565 一个像素占2个字节 base += width; //LCD显示指向下一行 start += frm_width;//指向下一行数据 } // 数据处理完之后、再入队、往复 ioctl(v4l2_fd, VIDIOC_QBUF, &buf); } } } int main(int argc, char *argv[]) { if (2 != argc) { fprintf(stderr, "Usage: %s <video_dev>\n", argv[0]); exit(EXIT_FAILURE); } /* 初始化LCD */ if (fb_dev_init()) exit(EXIT_FAILURE); /* 初始化摄像头 */ if (v4l2_dev_init(argv[1])) exit(EXIT_FAILURE); /* 枚举所有格式并打印摄像头支持的分辨率及帧率 */ v4l2_enum_formats(); v4l2_print_formats(); /* 设置格式 */ if (v4l2_set_format()) exit(EXIT_FAILURE); /* 初始化帧缓冲:申请、内存映射、入队 */ if (v4l2_init_buffer()) exit(EXIT_FAILURE); /* 开启视频采集 */ if (v4l2_stream_on()) exit(EXIT_FAILURE); /* 读取数据:出队 */ v4l2_read_data(); //在函数内循环采集数据、将其显示到LCD屏 exit(EXIT_SUCCESS); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
编译后拷贝到板端

三、板端运行
开发板重新上点,可以看到驱动在/lib/modules/4.1.15xxx/路径下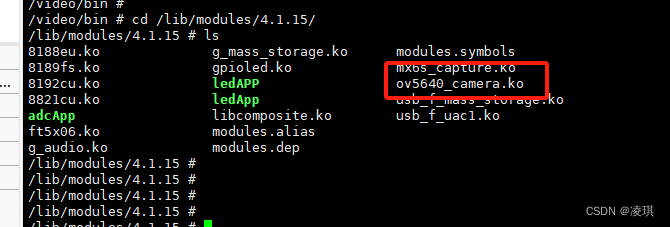
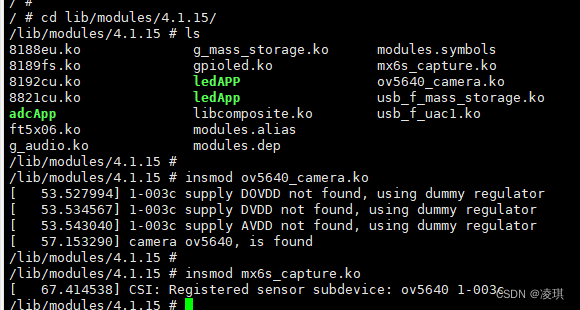
依次加载这两个驱动
运行应用测试程序
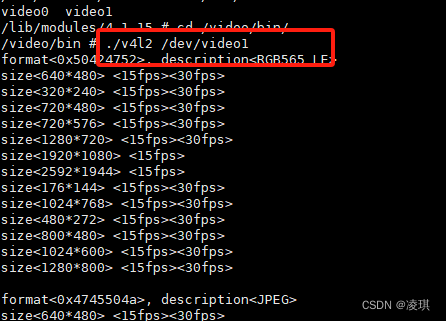
运行效果如下

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/711359
推荐阅读
相关标签

