
- 1基于Ollama和AnythingLLM,搭建本地的知识库_anythingllm.db
- 2HarmonyOS开发之ArkTS使用:新建活动页面_用arkts制作一个主页面
- 3Jaya原理及matlab实现在cec2005的测试-附代码_cec2005测试函数最优值
- 4Unity 中 Pivot 与 Center,重置模型物体的轴心为中心_unity pivot
- 5钢铁雄心4mod星火 国策树代码-2_钢铁雄心4国策代码
- 6山东大学2024深度学习期末考试回忆
- 7【机器学习算法-python实现】决策树-Decision tree(1) 信息熵划分数据集_python 西瓜数据1信息熵计算
- 8轻松破解加密网页_纯文字网页加密怎么解除
- 979、基于STM32单片机激光测距仪远距离倒车防撞报警器系统设计 (程序+原理图+PCB源文件+参考论文+硬件设计资料+元器件清单等)_单片机与激光测距的连接电路图
- 10Embedding和Word2Vec用法
LayerNorm层归一化
赞
踩
1.背景
与 Batch normalization 不同,Layer normalization 是在特征维度上进行标准化的,而不是在数据批次维度上。像 Batch Norm 它的核心是数据批次之间的归一化【强调的是第 i 批次和第 i+1 批次的区别,然后BN去缩小他们的的区别】,而 Layer Norm 的核心强调的是每个批次中不同维度数据之间的区别。
2.实现原理
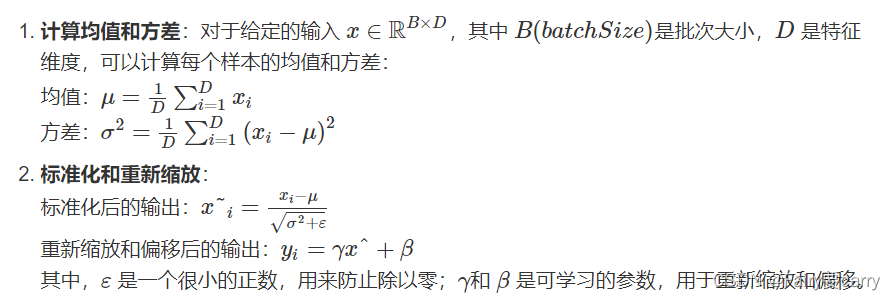
Layer normalization 是在特征维度上进行标准化的,而不是在数据批次维度上。
Layer normalization 的计算可以分为两步:
3.作用
1、特征强化: 通过归一化,每个样本的特征维度被标准化,使得每个维度的数据在训练过程中更加稳定,从而强化了每个维度数据的特征。
2、缓解梯度消失问题: 归一化使得输入数据的均值为零,方差为一,从而使得激活函数的输出更稳定,减小了梯度消失的问题。
3、稳定训练: 由于每一层的输入数据具有相同的均值和方差,梯度的传播更加稳定,有助于训练过程的稳定性和收敛速度。
4、缓解内部协变量偏移: 通过归一化每个样本的特征,Layer Normalization 可以减少每一层输入的分布变化,这有助于缓解训练过程中内部协变量偏移的问题。【虽然没有像BN那样对不同批次相同维的数据进行归一化(BN通过局部批次的数据得到每一个维度上数值的方差和均值),但是因为LN也缩小了数值的大小,所以说分布变化也一定变小了】
5、加速收敛和提高稳定性: 由于输入的均值和方差固定,梯度的变化更为稳定,从而加速了训练过程中的收敛。同时,归一化后的输入有助于缓解梯度消失和梯度爆炸问题,特别是在深层神经网络中。
4.代码
通过一个简单的例子来解释 Layer Normalization (LN) 是如何工作的
import torch import torch.nn as nn # 定义一个继承自nn.Module的LayerNorm类 class LayerNorm(nn.Module): def __init__(self, num_features, eps=1e-6): super().__init__() self.gamma = nn.Parameter(torch.ones(num_features)) # 缩放参数γ,可学习,初始值为1 self.beta = nn.Parameter(torch.zeros(num_features)) # 偏移参数β,可学习,初始值为0 self.eps = eps # 防止除以零的小正数 def forward(self, x): mean = x.mean(dim=-1, keepdim=True) # 计算最后一维的均值 std = x.std(dim=-1, keepdim=True, unbiased=False) # 计算最后一维的标准差 normalized_x = (x - mean) / (std + self.eps) # 归一化处理 return self.gamma * normalized_x + self.beta # 应用可学习的参数并返回结果 if __name__ == '__main__': batch_size = 2 seqlen = 3 hidden_dim = 4 # 初始化一个随机tensor,模拟一个batch中包含若干序列,每个序列有若干特征的情况 x = torch.randn(batch_size, seqlen, hidden_dim) print(x) # 初始化自定义的LayerNorm类 layer_norm = LayerNorm(num_features=hidden_dim) output_tensor = layer_norm(x) # 对x进行层归一化 print("output after layer norm:\n", output_tensor) # 使用PyTorch自带的LayerNorm进行对比 torch_layer_norm = torch.nn.LayerNorm(normalized_shape=hidden_dim) torch_output_tensor = torch_layer_norm(x) # 对x进行层归一化 print("output after torch layer norm:\n", torch_output_tensor)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
再举一个简单的例子
虑一个小的输入张量,它代表一个批次中的两个样本,每个样本有两个时间步,每个时间步有三个特征【2,2,3】。我们将使用 Python 和 PyTorch 来演示 LN 的过程:
import torch # 定义一个小的张量,形状为 [batch_size, time_steps, features] x = torch.tensor([ [[1.0, 2.0, 3.0], [4.0, 5.0, 6.0]], # 第一个样本的两个时间步 [[7.0, 8.0, 9.0], [10.0, 11.0, 12.0]] # 第二个样本的两个时间步 ]) # 手动实现 Layer Normalization,我们将在每个样本的每个时间步上分别归一化 normalized_x = torch.empty_like(x) for i in range(x.shape[0]): # 遍历批次 for j in range(x.shape[1]): # 遍历时间步 # 计算第 i 个样本的第 j 个时间步的均值和标准差 mean = x[i, j].mean() std = x[i, j].std() # 归一化处理 normalized_x[i, j] = (x[i, j] - mean) / (std + 1e-6) print("原始数据:") print(x) print("归一化后的数据:") print(normalized_x)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
5.LN在Transformer中所放位置
1.PreNorm和PostNorm在公式上的区别:

2.在大模型中的区别:
**Post-LN
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

