- 1数据实时传输平台(CDC)与低代码平台(APAAS)数据集成_cdc平台
- 2ZYNQ petalinux系统使用axi_bram进行PL与PS数据交互_ps和pl通过bram批量数据读写
- 3课工场题库自动化脚本原理分析及实现(文章末尾附免费可用版本)_免费脚本题库配置链接
- 4IOS - swift SDK开发_制作 swift sdk
- 5AI产品经理入门全指南资料库_ai产品经理知识库
- 6Phoenix启动过程出现的问题_phoenix启动后没有master
- 7将句子表示为向量:无监督句子表示学习(sentence embedding)
- 8Fine-tuning: 深度解析P-tuning v2在大模型上的应用_ptuning v2原理
- 9Git笔记-Connection reset by 13.229.188.59 port 22 fatal: Could not read from remote repository._connection reset by 180.76.198.77 port 22 fatal: c
- 1010张图看AI趋势:到2025年全球AI企业营收增幅53%_ai产业对gdp的贡献率 图表
4.RVIZ2可视化URDF_rviz2可视化移动机器人教程
赞
踩
4.RVIZ2可视化URDF
一、本节介绍:
在之前,我们讲了机器人建模语言URDF与可视化工具RVIZ2,在本节,我们将使用这两个工具来可视化一个移动机器人模型。具体步骤如下:
- 建立机器人描述功能包
- 建立URDF文件夹,编写机器人的URDF描述文件
- 建立launch文件夹,编写launch文件
- 修改setup.py配置
(注:建立文件夹的目的是为了便于文件管理,区分各文件功能。)
创建了一个名称为ros2_car的工作空间
mkdir -p ros2_car/src
cd ros2_car/src
- 1
- 2
建立功能包
以python为编程语言创建一个功能包,这个功能包用作对机器人的URDF信息进行描述,存在于src目录下,功能包创建代码如下:
ros2 pkg create ros_car_description --build-type ament_python
- 1
创建URDF文件
在工作空间的机器人的URDF描述功能包中创建urdf文件夹用以存放urdf文件
在urdf文件夹下创建一个urdf文件:
cd ros_car_description
mkdir urdf
vim ros_car.urdf
- 1
- 2
- 3
在这里我使用的是vim文本编辑器进行文本的创建与编辑,这个工具需要提前安装,若没有安装过这个文本编辑器,则需要输入以下指令进行安装
sudo apt install vim
- 1
在网上有很多与VIM相关的使用教程,大家可自行探索其使用方法,这里暂不作进一步讲述。
在这里创建了一个四轮小车模型。
ros_car.urdf:
<?xml version="1.0"?> <robot name="ros_car"> <!-- base_link --> <link name="base_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <cylinder length="0.12" radius="0.10"/> </geometry> <material name="blue"> <color rgba="0.1 0.1 1.0 0.5" /> </material> </visual> </link> <!-- laser_link --> <link name="laser_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.03" radius="0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- laser_joint --> <joint name="laser_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0.075" /> </joint> <!-- imu_link --> <link name="imu_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <box size="0.02 0.02 0.02"/> </geometry> </visual> </link> <!-- imu_joint --> <joint name="imu_joint" type="fixed"> <parent link="base_link" /> <child link="imu_link" /> <origin xyz="0 0 0.04" /> </joint> <!-- left_wheel1_link --> <link name="left_wheel1_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.03" radius="0.024"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- left_wheel1_joint --> <joint name="left_wheel1_joint" type="continuous"> <parent link="base_link" /> <child link="left_wheel1_link" /> <origin xyz="-0.08 0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <!-- left_wheel2_link --> <link name="left_wheel2_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.03" radius="0.024"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- left_wheel2_joint --> <joint name="left_wheel2_joint" type="continuous"> <parent link="base_link" /> <child link="left_wheel2_link" /> <origin xyz="0.08 0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <!-- right_wheel1_link --> <link name="right_wheel1_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.03" radius="0.024"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- right_wheel1_joint --> <joint name="right_wheel1_joint" type="continuous"> <parent link="base_link" /> <child link="right_wheel1_link" /> <origin xyz="-0.08 -0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <!-- right_wheel2_link --> <link name="right_wheel2_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.03" radius="0.024"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- bright_wheel2_joint --> <joint name="right_wheel2_joint" type="continuous"> <parent link="base_link" /> <child link="right_wheel2_link" /> <origin xyz="0.08 -0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <!-- Robot Footprint --> <!--默认情况下模型是以base_link作为参照的,不着地,这里添加一个joint来让模型着地 --> <link name="base_footprint"/> <joint name="base_joint" type="fixed"> <parent link="base_footprint"/> <child link="base_link"/> <origin xyz="0.0 0.0 0.072" rpy="0 0 0"/> </joint> </robot>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
创建launch文件
使用 launch 来一键启动可视化URDF所需的相关结点,这些结点被封装进了特定的功能包内,这些功能包包括
joint_state_publisher:通过 joint_states 话题来负责发布机器人关节数据信息。
joint_state_publisher_gui:通过 joint_states 话题来负责发布机器人关节数据信息。这个功能包还会提供一个可视化界面供我们操作关节。
robot_state_publisher_node:通过 robot_description 话题来发布机器人的模型信息,并将joint_states数据转换成 tf 信息发布出去。(发布urdf的最终整合处)
先通过以下两个指令来安装这两个功能包:
sudo apt install ros-$ROS_DISTRO-joint-state-publisher-gui ros-$ROS_DISTRO-robot-state-publisher
- 1
RVIZ2通过这两个话题,就能够将我们的机器人模型可视化显示出来,现在来创建启动这两个结点的launch文件,在ros_car_description文件夹下创建一个launch文件夹,并launch文件夹下创建一个名为urdf_node.launch.py:
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): package_name = 'ros_car_description' urdf_name = "ros_car.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) # 寻找 share 目录路径 urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') # 字符串拼接,最后一部分是格式化字符串,输出应为urdf/ros_car.urdf robot_state_publisher_node = Node( # 通过功能包来调用机器人模型发布结点 package='robot_state_publisher', # 功能包名称 executable='robot_state_publisher', # 功能包下对应的可执行文件 arguments=[urdf_model_path] # 传递urdf文件的路径作为参数 ) joint_state_publisher_node = Node( # 通过功能包来调用机器人模型关节的发布结点 package='joint_state_publisher_gui', # 功能包名称 executable='joint_state_publisher_gui', # 功能包下对应的可执行文件 name='joint_state_publisher_gui', # 为结点起一个名称,以区分其他同类型结点 arguments=[urdf_model_path] # 传递urdf文件的路径作为参数 ) ld.add_action(robot_state_publisher_node) # 该结点的ROS2通信形式是动作,将结点动作加入launch执行器中 ld.add_action(joint_state_publisher_node) # 该结点的ROS2通信形式是动作,将结点动作加入launch执行器中 return ld
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
在这里解释下为什么urdf文件存放在了share文件夹下,share目录用于存储与代码无关的静态数据,如URDF、配置文件和资源文件。将这些文件放在share目录下可以确保它们在包安装后被正确找到。许多ROS工具和库期望描述文件和其他资源位于share目录下。这样可以简化工具的设计,使得它们能够一致地查找和加载所需的资源。在代码中,使用 FindPackageShare 来查找包的位置,然后构建URDF文件的路径,这是标准的ROS 2做法。该命令会查找安装包中的 share 目录,并确保URDF文件路径的正确性。总的来说, share 目录统一存放各种数据及资源,以方便ROS2中的其他资源调用。
修改setup.py配置
在ROS2中使用 Python 语言编写完launch文件后,我们还需要修改setup.py文件。setup.py文件是 python 包管理和构建的重要部分,通过这个文件可以让系统明白如何构建和安装包等,声明程序的入口点。在此处,它定义了ROS 2包的元数据和依赖项(与package.xml文件的功能有一点点小重叠)。这些信息包括包的名称、版本、作者、描述、依赖关系等。通过定义这些信息,可以确保包的正确构建和安装。package.xml主要用于ROS2包的构建,而setup.py用于 Python 包的构建和安装,在ROS2里都用到了,故而两个文件都存在于其下功能包目录下。
setup.py:
from setuptools import find_packages, setup from glob import glob import os package_name = 'ros_car_description' # 我们所创建的功能包名称 setup( name=package_name, version='0.0.0', packages=find_packages(exclude=['test']), # 排除指定目录的查找该包路径 data_files=[ # 在这里定义出需要的额外说明的数据元素 ('share/ament_index/resource_index/packages', ['resource/' + package_name]), ('share/' + package_name, ['package.xml']), # package.xml文件与setup.py文件共同作用,一个用于定义依赖关系和元数据,一个用于包的构建与安装 # 此下两行为我们额外添加的launch文件路径及urdf文件路径 (os.path.join('share',package_name,'launch'),glob('launch/*.launch.py')), (os.path.join('share',package_name,'urdf'),glob('urdf/**')), ], install_requires=['setuptools'], # 功能包的依赖项,在编译时会自动引用或安装这些依赖项,以确保功能包的正常运行 zip_safe=True, maintainer='ailan', maintainer_email='ailan@todo.todo', description='TODO: Package description', license='TODO: License declaration', tests_require=['pytest'], entry_points={ # 程序的主函数入口点,让系统明白从何处进入并运行代码 'console_scripts': [ ], }, )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
编译测试
现在整个工作空间下仅有 ros_car_description 这一个功能包,我们切换到这个功能包目录中,并在其下对功能包进行编译:
colcon build
- 1
再使用以下指令以配置当前的终端环境变量:
source install/setup.bash
- 1
这里简单解释下这个命令,该命令运行了一个脚本,该脚本会设置多个环境变量,包括但不限于以下内容:
ROS_PACKAGE_PATH:指定ROS 2包的查找路径。AMENT_PREFIX_PATH:指定ament构建系统的前缀路径。LD_LIBRARY_PATH:指定共享库的查找路径。PYTHONPATH:指定Python包的查找路径。PATH:添加可执行文件的路径,使得你可以在命令行中直接运行ROS 2的可执行文件和工具。
这些环境变量的设置确保了在当前终端会话中,你可以正确运行和找到ROS 2包和工具。因而每个新的终端当中都需要实现运行一遍这行命令,这一步骤是必不可少的。
运行我们的 launch 文件,来发布机器人模型及关节信息。
ros2 launch ros_car_description urdf_node.launch.py
- 1
RVIZ2可视化机器人模型:
打开rviz2,在左侧栏下点击Add,添加 RobotModel 显示件,在 Description Topic 一栏中选择robot_state_publisher_node 所发布的 ros_description话题来可视化我们URDF中定义的机器人模型。启动rviz2:
rviz2
- 1
通过以下指令来查看当前有何话题被发布出来了:
ros2 topic list
- 1
结果如下:
这里对现在这几个被发布的话题作简单的介绍:
/joint_states:该话题用于发布机器人关节状态信息,包括各个关节的位置、速度、加速度等。由我们调用的功能包中的 robot_state_publisher 结点发布。
/parameter_events:该话题用于发布与参数(Parameters)相关的事件。当ROS参数的值发生变化时,会通过这个话题发布参数事件消息,通知订阅者参数的更新情况。
/robot_description:该话题用于发布机器人的URDF描述,即发布机器人的模型信息。由我们调用的功能包中的 joint_state_publisher_gui 结点发布。
/rosout:用于发布 ROS2 系统的日志信息。所有节点的输出日志都会自动发布到这个话题上,以便于监控和调试ROS系统的运行状态。
/tf:该话题用于发布机器人的坐标变换(Transforms),即机器人不同坐标系之间的转换关系。
/tf_static:用于发布静态的坐标变换,其所发布的变换关系通常是固定不变的,即不随时间的变化而变化。
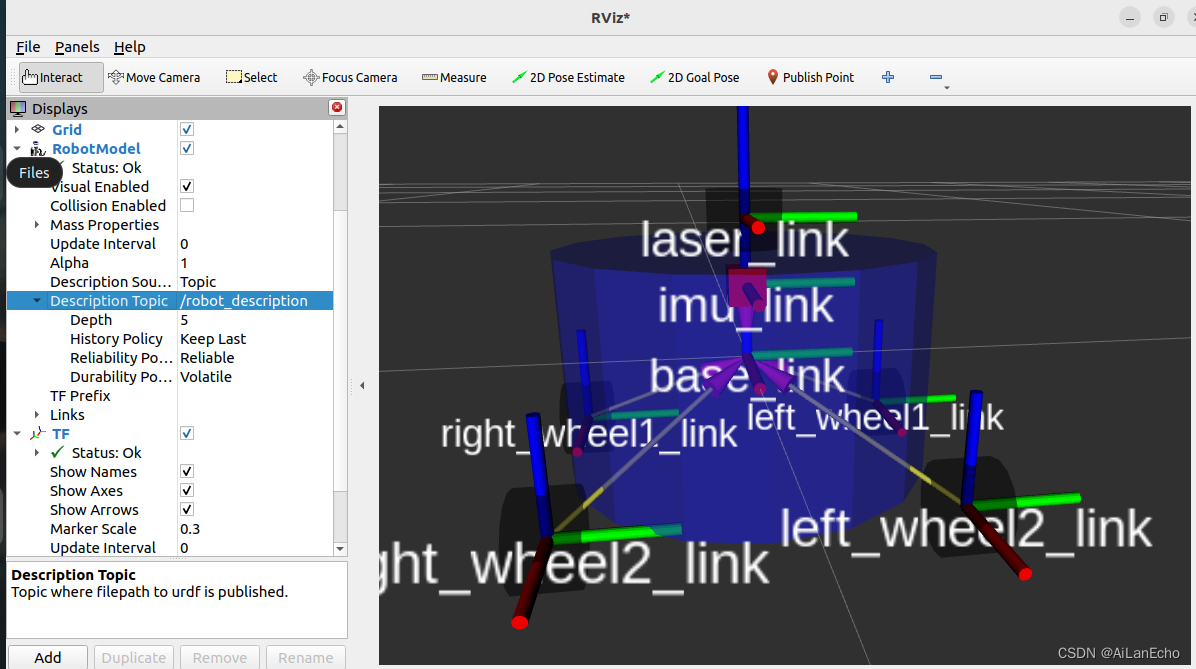
在RVIZ2中显示机器人模型:
如图所示配置RVIZ2左侧栏,点击 Focus Camera 移动镜头以进一步观察我们定义的机器人模型,可以发现我这里的每个 link 都显示了名称,这是因为我在RVIZ2中添加了 TF 件并勾选了 Show Names 属性,如左侧显示,调整Marker Scale以控制显示字体的大小,最终显示效果如下图: