
- 1Hadoop HA高可用配置(2021年最新)_hadoop的ha适配
- 2世界各国在海洋探索领域的进展_截至目前,德国没有风渔结合的实际项目实施
- 3用秩讨论线性方程组的解/三个平面的位置关系_平面互异
- 4顺序表、单链表、循环单链表、循环双链表、有序单链表的排序的实现
- 5GPT-4o 工作原理及其语音视频交互原理(非常详细)零基础入门到精通,收藏这一篇就够了_gpt4o原理
- 6GAMES101作业0环境配置_games101作业下载 vcpk
- 7RKNN模型训练转换部署_rknn android
- 8Maven 指定setting.xml 编译 及常用命令总结_mvn dependency:tree 指定settings
- 9华为OD机试统一考试D卷C卷 - 找出作弊的人(C++ Java JavaScript Python C语言)_华为odjava后端abc卷
- 10php连接到MySQL数据库服务器时三种主要的API:mysql,mysqli,pdo区别及联系_php接口和mysql通讯用啥协议来着
yolov8onnx的处理过程_yolov8 onnx处理
赞
踩
最近要在地平线旭日x3上部署yolov8,但是模型后处理过程地平线官方并没有给例程,所以自己研究一下,由于地平线的模型量化只支持onnx中opset10/11的模型,所以转化过程要设置opset为11。在default.yaml文件中配置输出onnx,opset11,导出onnx模型。
在我自己的电脑上进行了onnx本地cpu推理,大概是50ms一帧,也就是20帧左右,下面介绍yolov8后处理的debug过程:
1.首先从predict_cli这个函数开始
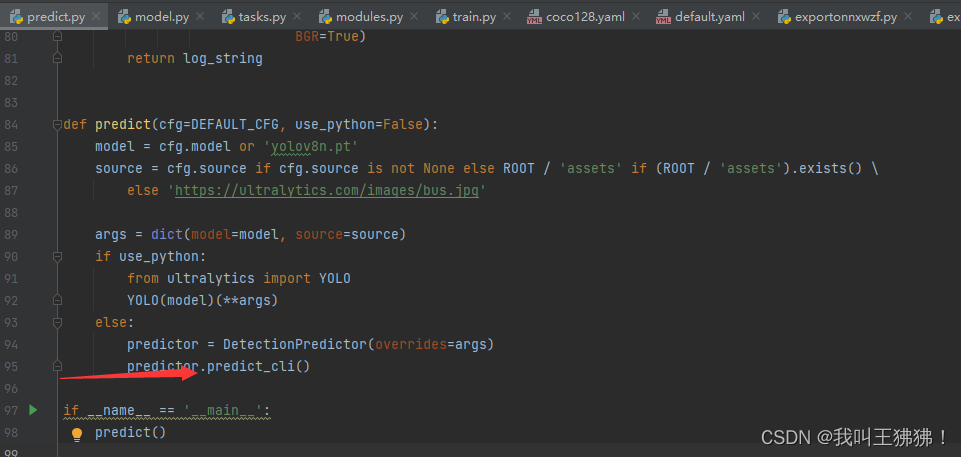
2.在1之后进入到stream_inference函数(推理)中:

在默认超参数设置函数中的setup_model用来完成辨别后端模型是哪种形式
3.进入setup_source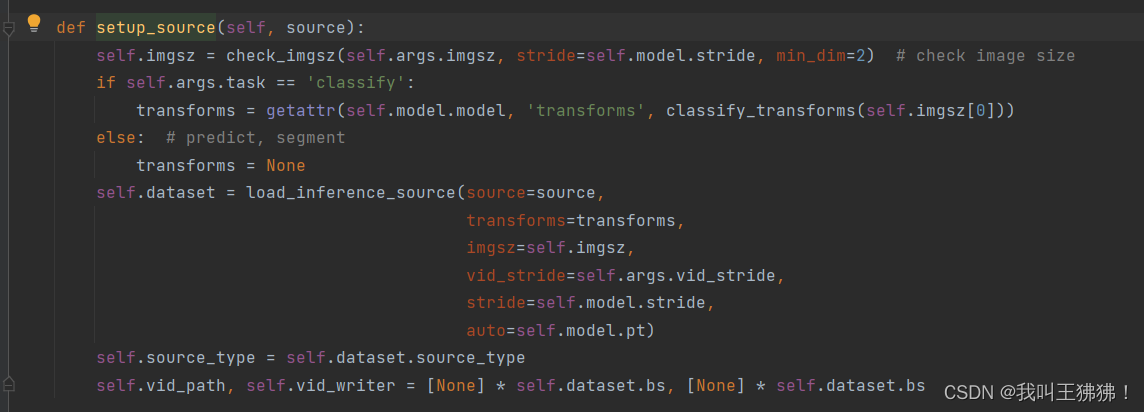
check_imgsz检查图片大小是否符合,然后load_inference_source处理推理源数据
然后是LoadImages类,这个类中使用了LetterBox,LetterBox的作用是将输入的图像调整为指定大小(`imgsz`参数),并在图像周围添加黑色背景以保持纵横比。
这段代码首先使用stack函数将由LetterBox函数处理后的多张图像的形状组合成一个新的数组 s。然后,使用np.unique函数找到数组s中独特的行,并获取其行数。如果独特行的数量为1,那么说明所有图像的形状都相同,可以进行矩形推断(rect inference)。这段代码的作用是计算数据集中所有图像的形状,并确定是否可以进行矩形推断。此外,它还存储数据集的变换和大小。
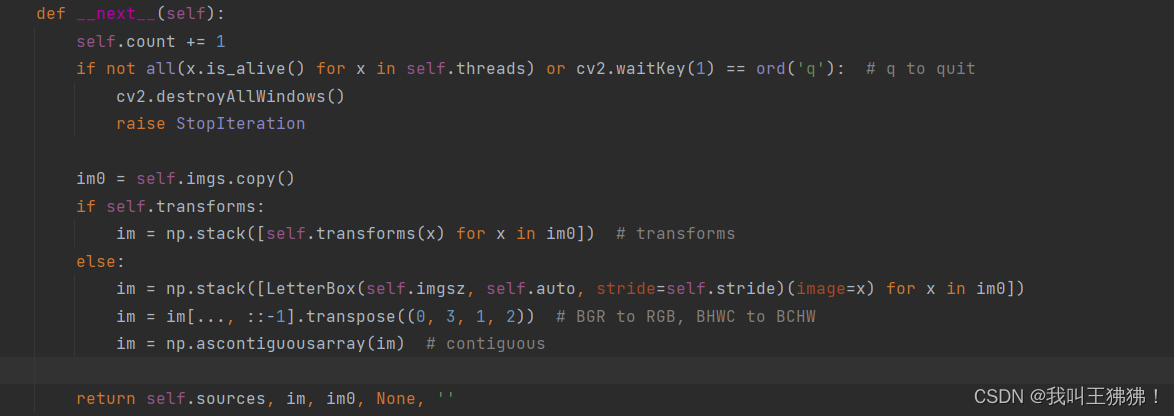
transforms为None,所以在每次迭代时将使用LetterBox函数对每个图像都使用LetterBox函数进行调整,并将它们堆叠到一个新的数组im中。然后,将im数组中的所有图像从 BGR 格式转换为 RGB 格式,并将它们的维度从 BHWC (批次,高度,宽度,通道)转换为 BCHW (批次,通道,高度,宽度)。
4.进行输入onnx之前的预处理,即preprocess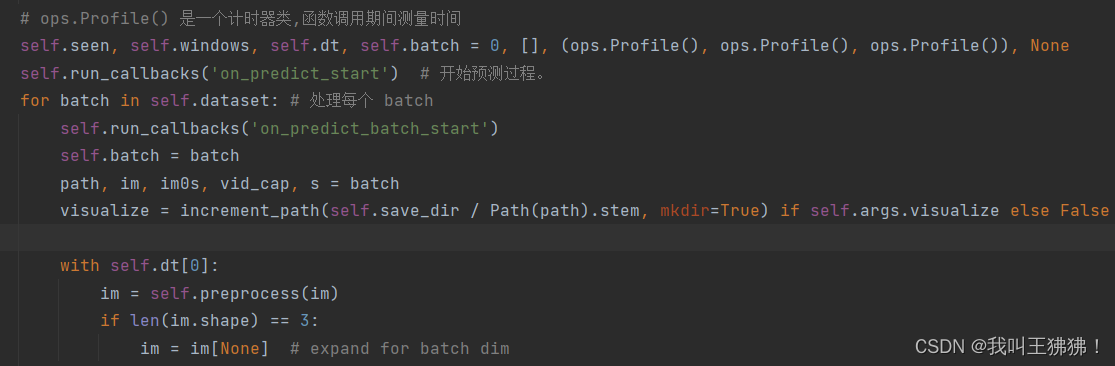

对数据进行了归一化处理,未进行半精度。
5.inference
输出的形状是1*84*8400,这里使用的是coco128的数据集,类别是80个类
6.进入本文主题,后处理postprocess
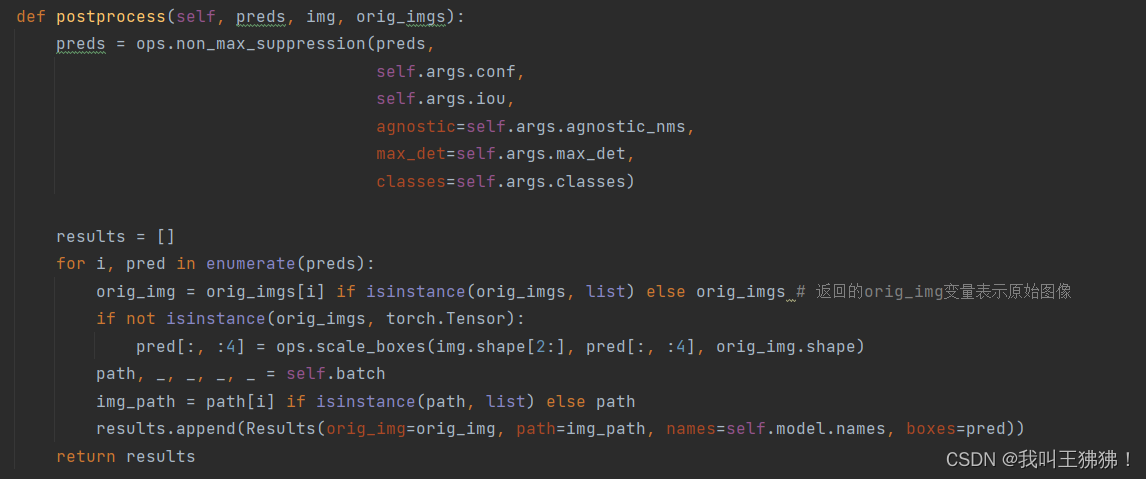
(1)调用了ops代码中的non_max_suppression方法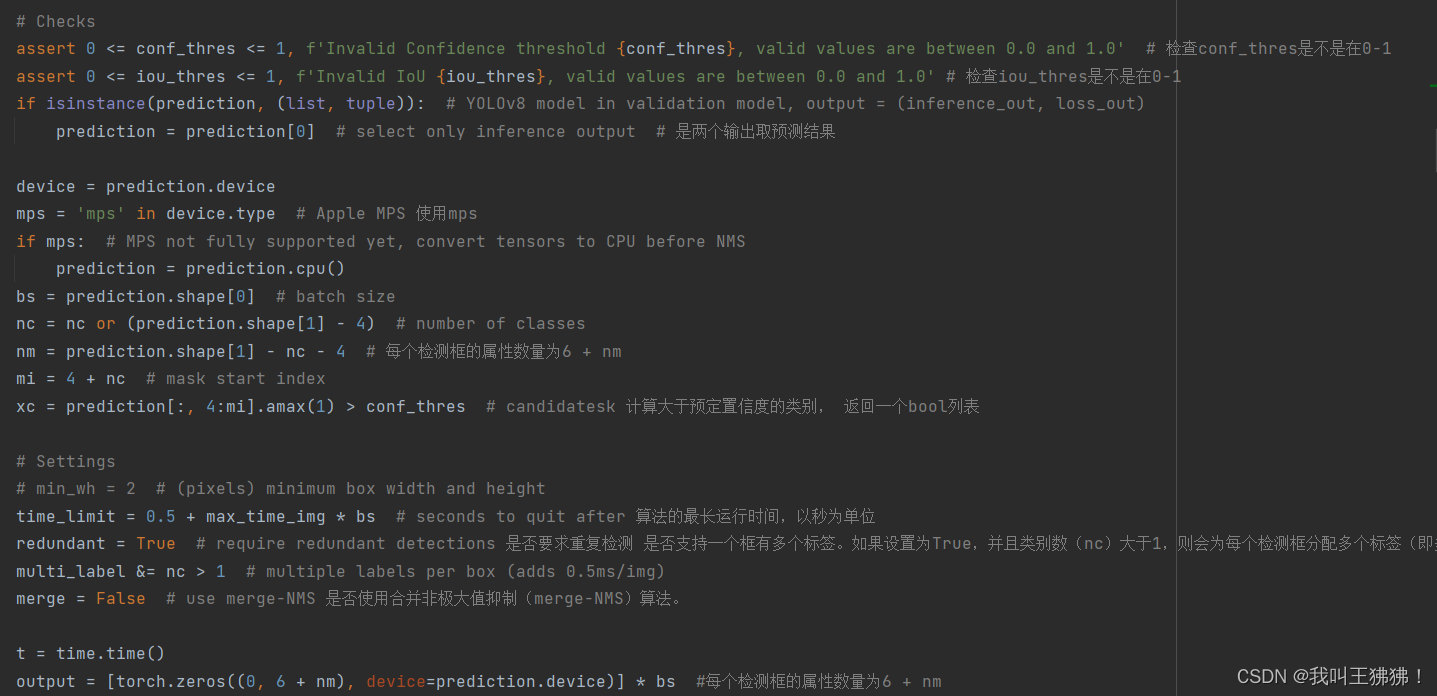
对于模型输出一般是两个,一个是预测结果,一个是损失函数输出结果,所以在perdiction中选择了第一维,还有一些变量记录:
nc:类数
nm:每个矩形框的属性数量
mi:属性起始位置
xc:返回的一个1*8400的Tensor,bool型的,表示该检测框是否满足置信度阈值的要求
output:输出每个检测框的属性。
(2)开始对预测结果进行处理,xi为索引,x为84*8400的tensor
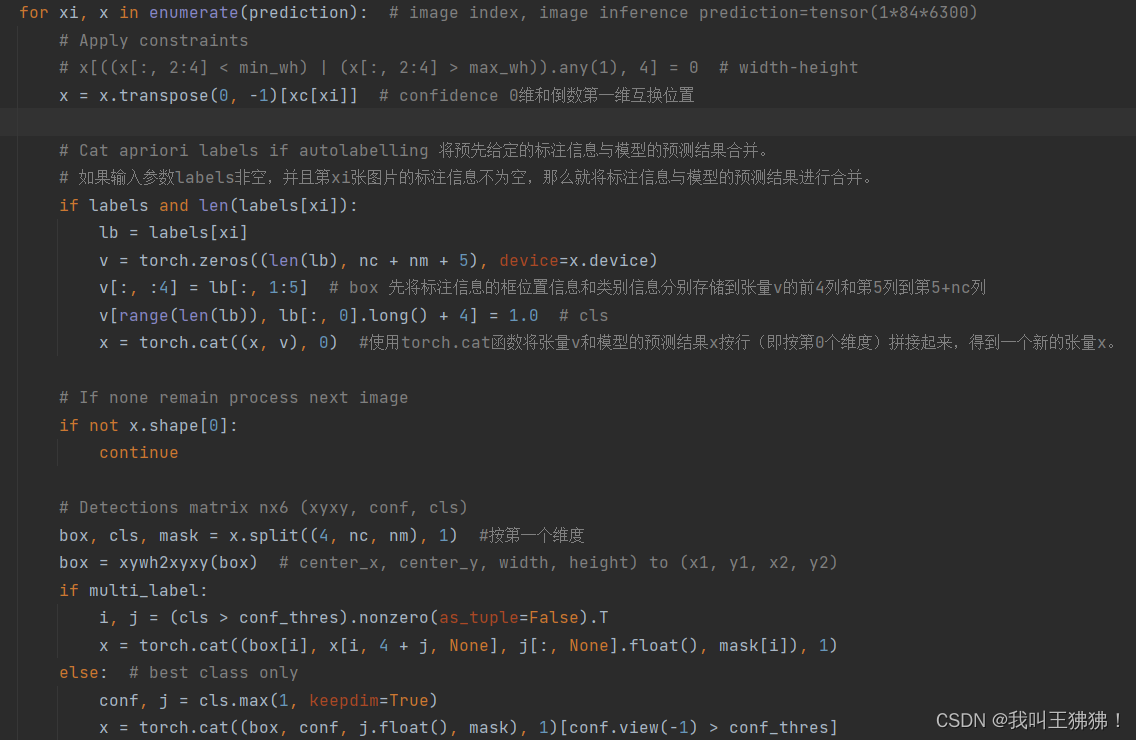
以自带的bus.jpg为例,模型输出找到了48个符合conf的目标框,于是x变成了48*84的tensor
将x切片,在84中,切成了4(box),80(cls),0(mask)
在xywhxyxy函数中,将box的四个元素从x,y(中心点),框的宽高转为了(x1,y1),(x2,y2),multi_label是false,所以返回了置信度最大的类的索引和置信度,然后将box
(48*4),conf(48*1),j(48*1),mask(48*0)进行一维拼接得到一个(48*6)的tensor
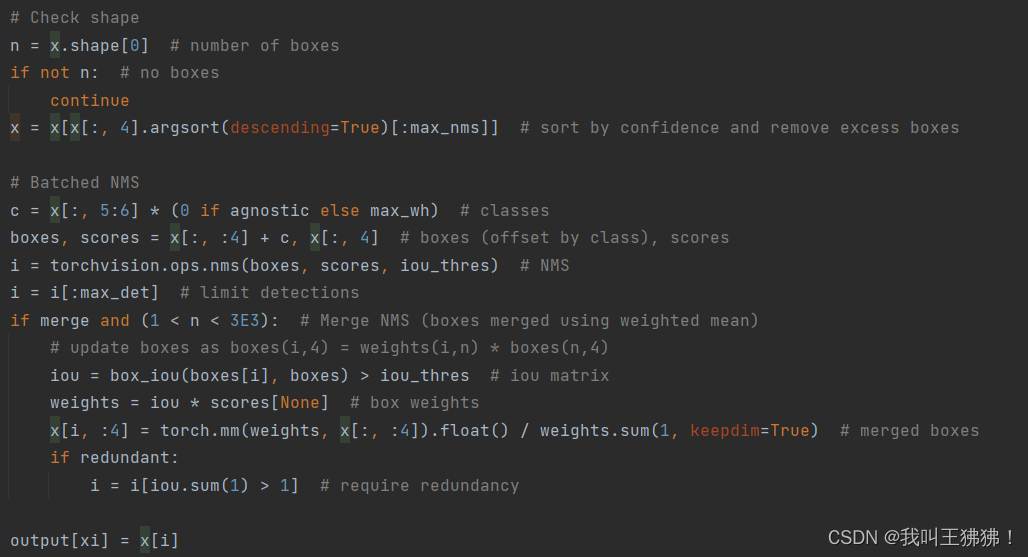
n是框的数量,然后对框进行排序(降序),选超参数中设置的max_nms个框,默认为300,最后x仍然是一个(48*6)的tensor,然后对着48个框进行对应类别的conf计算,max=wh表示加入框的大小时对score的影响,最后返回的c是一个(48*1)
(3)使用了torchvision中的nms的方法,返回了一个剩下的检测框的索引tensor->i,在本次debug中i里面有5个索引,所以是剩下了5个框,具体nms的过程:
①首先,根据模型预测的边界框,计算每个边界框的置信度得分。
②接着,从置信度得分最高的边界框开始,按照置信度得分从高到低的顺序对所有边界框进行排序。
③然后,选择置信度得分最高的边界框,并将其添加到输出列表中。
④对于剩余的边界框,计算它们与输出列表中最后一个边界框的重叠区域(即交集),并计算它们的重叠区域与它们自身区域的比值(即IoU)。如果该比值大于某个阈值(通常为0.5),则将该边界框从列表中删除,否则保留该边界框。
⑤重复步骤3和4,直到所有边界框都被处理完毕。
贴出官方函数的内容: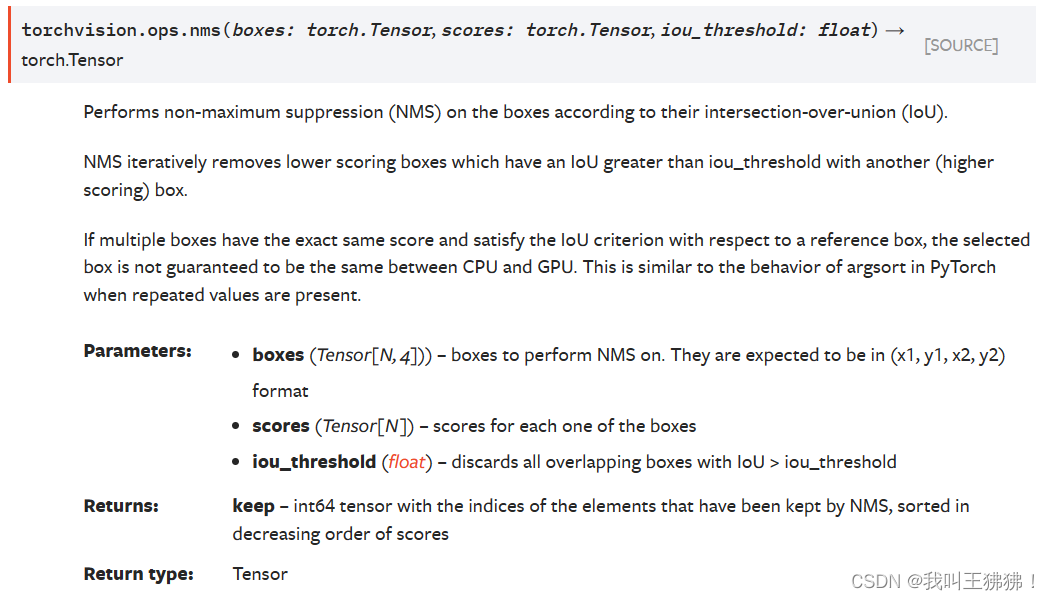
源码:
- import torch
- from torch.jit.annotations import Tuple
- from torch import Tensor
- from ._box_convert import _box_cxcywh_to_xyxy, _box_xyxy_to_cxcywh, _box_xywh_to_xyxy, _box_xyxy_to_xywh
- import torchvision
- from torchvision.extension import _assert_has_ops
-
-
- [docs]def nms(boxes: Tensor, scores: Tensor, iou_threshold: float) -> Tensor:
- """
- Performs non-maximum suppression (NMS) on the boxes according
- to their intersection-over-union (IoU).
- NMS iteratively removes lower scoring boxes which have an
- IoU greater than iou_threshold with another (higher scoring)
- box.
- If multiple boxes have the exact same score and satisfy the IoU
- criterion with respect to a reference box, the selected box is
- not guaranteed to be the same between CPU and GPU. This is similar
- to the behavior of argsort in PyTorch when repeated values are present.
- Parameters
- ----------
- boxes : Tensor[N, 4])
- boxes to perform NMS on. They
- are expected to be in (x1, y1, x2, y2) format
- scores : Tensor[N]
- scores for each one of the boxes
- iou_threshold : float
- discards all overlapping
- boxes with IoU > iou_threshold
- Returns
- -------
- keep : Tensor
- int64 tensor with the indices
- of the elements that have been kept
- by NMS, sorted in decreasing order of scores
- """
- _assert_has_ops()
- return torch.ops.torchvision.nms(boxes, scores, iou_threshold)
-
-
-
- [docs]@torch.jit._script_if_tracing
- def batched_nms(
- boxes: Tensor,
- scores: Tensor,
- idxs: Tensor,
- iou_threshold: float,
- ) -> Tensor:
- """
- Performs non-maximum suppression in a batched fashion.
- Each index value correspond to a category, and NMS
- will not be applied between elements of different categories.
- Parameters
- ----------
- boxes : Tensor[N, 4]
- boxes where NMS will be performed. They
- are expected to be in (x1, y1, x2, y2) format
- scores : Tensor[N]
- scores for each one of the boxes
- idxs : Tensor[N]
- indices of the categories for each one of the boxes.
- iou_threshold : float
- discards all overlapping boxes
- with IoU > iou_threshold
- Returns
- -------
- keep : Tensor
- int64 tensor with the indices of
- the elements that have been kept by NMS, sorted
- in decreasing order of scores
- """
- if boxes.numel() == 0:
- return torch.empty((0,), dtype=torch.int64, device=boxes.device)
- # strategy: in order to perform NMS independently per class.
- # we add an offset to all the boxes. The offset is dependent
- # only on the class idx, and is large enough so that boxes
- # from different classes do not overlap
- else:
- max_coordinate = boxes.max()
- offsets = idxs.to(boxes) * (max_coordinate + torch.tensor(1).to(boxes))
- boxes_for_nms = boxes + offsets[:, None]
- keep = nms(boxes_for_nms, scores, iou_threshold)
- return keep
-
-
-
- [docs]def remove_small_boxes(boxes: Tensor, min_size: float) -> Tensor:
- """
- Remove boxes which contains at least one side smaller than min_size.
- Arguments:
- boxes (Tensor[N, 4]): boxes in (x1, y1, x2, y2) format
- min_size (float): minimum size
- Returns:
- keep (Tensor[K]): indices of the boxes that have both sides
- larger than min_size
- """
- ws, hs = boxes[:, 2] - boxes[:, 0], boxes[:, 3] - boxes[:, 1]
- keep = (ws >= min_size) & (hs >= min_size)
- keep = torch.where(keep)[0]
- return keep
-
-
-
- [docs]def clip_boxes_to_image(boxes: Tensor, size: Tuple[int, int]) -> Tensor:
- """
- Clip boxes so that they lie inside an image of size `size`.
- Arguments:
- boxes (Tensor[N, 4]): boxes in (x1, y1, x2, y2) format
- size (Tuple[height, width]): size of the image
- Returns:
- clipped_boxes (Tensor[N, 4])
- """
- dim = boxes.dim()
- boxes_x = boxes[..., 0::2]
- boxes_y = boxes[..., 1::2]
- height, width = size
-
- if torchvision._is_tracing():
- boxes_x = torch.max(boxes_x, torch.tensor(0, dtype=boxes.dtype, device=boxes.device))
- boxes_x = torch.min(boxes_x, torch.tensor(width, dtype=boxes.dtype, device=boxes.device))
- boxes_y = torch.max(boxes_y, torch.tensor(0, dtype=boxes.dtype, device=boxes.device))
- boxes_y = torch.min(boxes_y, torch.tensor(height, dtype=boxes.dtype, device=boxes.device))
- else:
- boxes_x = boxes_x.clamp(min=0, max=width)
- boxes_y = boxes_y.clamp(min=0, max=height)
-
- clipped_boxes = torch.stack((boxes_x, boxes_y), dim=dim)
- return clipped_boxes.reshape(boxes.shape)
-
-
-
- [docs]def box_convert(boxes: Tensor, in_fmt: str, out_fmt: str) -> Tensor:
- """
- Converts boxes from given in_fmt to out_fmt.
- Supported in_fmt and out_fmt are:
- 'xyxy': boxes are represented via corners, x1, y1 being top left and x2, y2 being bottom right.
- 'xywh' : boxes are represented via corner, width and height, x1, y2 being top left, w, h being width and height.
- 'cxcywh' : boxes are represented via centre, width and height, cx, cy being center of box, w, h
- being width and height.
- Arguments:
- boxes (Tensor[N, 4]): boxes which will be converted.
- in_fmt (str): Input format of given boxes. Supported formats are ['xyxy', 'xywh', 'cxcywh'].
- out_fmt (str): Output format of given boxes. Supported formats are ['xyxy', 'xywh', 'cxcywh']
- Returns:
- boxes (Tensor[N, 4]): Boxes into converted format.
- """
-
- allowed_fmts = ("xyxy", "xywh", "cxcywh")
- if in_fmt not in allowed_fmts or out_fmt not in allowed_fmts:
- raise ValueError("Unsupported Bounding Box Conversions for given in_fmt and out_fmt")
-
- if in_fmt == out_fmt:
- return boxes.clone()
-
- if in_fmt != 'xyxy' and out_fmt != 'xyxy':
- # convert to xyxy and change in_fmt xyxy
- if in_fmt == "xywh":
- boxes = _box_xywh_to_xyxy(boxes)
- elif in_fmt == "cxcywh":
- boxes = _box_cxcywh_to_xyxy(boxes)
- in_fmt = 'xyxy'
-
- if in_fmt == "xyxy":
- if out_fmt == "xywh":
- boxes = _box_xyxy_to_xywh(boxes)
- elif out_fmt == "cxcywh":
- boxes = _box_xyxy_to_cxcywh(boxes)
- elif out_fmt == "xyxy":
- if in_fmt == "xywh":
- boxes = _box_xywh_to_xyxy(boxes)
- elif in_fmt == "cxcywh":
- boxes = _box_cxcywh_to_xyxy(boxes)
- return boxes
-
-
-
- [docs]def box_area(boxes: Tensor) -> Tensor:
- """
- Computes the area of a set of bounding boxes, which are specified by its
- (x1, y1, x2, y2) coordinates.
- Arguments:
- boxes (Tensor[N, 4]): boxes for which the area will be computed. They
- are expected to be in (x1, y1, x2, y2) format
- Returns:
- area (Tensor[N]): area for each box
- """
- return (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1])
-
-
-
- # implementation from https://github.com/kuangliu/torchcv/blob/master/torchcv/utils/box.py
- # with slight modifications
- [docs]def box_iou(boxes1: Tensor, boxes2: Tensor) -> Tensor:
- """
- Return intersection-over-union (Jaccard index) of boxes.
- Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
- Arguments:
- boxes1 (Tensor[N, 4])
- boxes2 (Tensor[M, 4])
- Returns:
- iou (Tensor[N, M]): the NxM matrix containing the pairwise IoU values for every element in boxes1 and boxes2
- """
- area1 = box_area(boxes1)
- area2 = box_area(boxes2)
-
- lt = torch.max(boxes1[:, None, :2], boxes2[:, :2]) # [N,M,2]
- rb = torch.min(boxes1[:, None, 2:], boxes2[:, 2:]) # [N,M,2]
-
- wh = (rb - lt).clamp(min=0) # [N,M,2]
- inter = wh[:, :, 0] * wh[:, :, 1] # [N,M]
-
- iou = inter / (area1[:, None] + area2 - inter)
- return iou
-
-
-
- # Implementation adapted from https://github.com/facebookresearch/detr/blob/master/util/box_ops.py
- [docs]def generalized_box_iou(boxes1: Tensor, boxes2: Tensor) -> Tensor:
- """
- Return generalized intersection-over-union (Jaccard index) of boxes.
- Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
- Arguments:
- boxes1 (Tensor[N, 4])
- boxes2 (Tensor[M, 4])
- Returns:
- generalized_iou (Tensor[N, M]): the NxM matrix containing the pairwise generalized_IoU values
- for every element in boxes1 and boxes2
- """
-
- # degenerate boxes gives inf / nan results
- # so do an early check
- assert (boxes1[:, 2:] >= boxes1[:, :2]).all()
- assert (boxes2[:, 2:] >= boxes2[:, :2]).all()
-
- area1 = box_area(boxes1)
- area2 = box_area(boxes2)
-
- lt = torch.max(boxes1[:, None, :2], boxes2[:, :2]) # [N,M,2]
- rb = torch.min(boxes1[:, None, 2:], boxes2[:, 2:]) # [N,M,2]
-
- wh = (rb - lt).clamp(min=0) # [N,M,2]
- inter = wh[:, :, 0] * wh[:, :, 1] # [N,M]
-
- union = area1[:, None] + area2 - inter
-
- iou = inter / union
-
- lti = torch.min(boxes1[:, None, :2], boxes2[:, :2])
- rbi = torch.max(boxes1[:, None, 2:], boxes2[:, 2:])
-
- whi = (rbi - lti).clamp(min=0) # [N,M,2]
- areai = whi[:, :, 0] * whi[:, :, 1]
-
- return iou - (areai - union) / areai
 '运行
'运行以上为官方源码,对于以上函数做了一些解释:
def nms(boxes: Tensor, scores: Tensor, iou_threshold: float) -> Tensor:
基本 NMS 函数。给定一组边界框和相应的得分,该函数利用它们之间的 IoU 值对边界框进行排序,并应用阈值策略来删除重叠的边界框。该函数包括以下步骤:
接收输入参数 boxes (N, 4) , N 是边界框的数量,scores(N,),包含每个边界框的得分和 IoU 阈值。返回 keep,包含保留的边界框的索引,这些边界框已按其得分从高到低排序。
def batched_nms(
boxes: Tensor,
scores: Tensor,
idxs: Tensor,
iou_threshold: float, ) -> Tensor:
批处理模式下执行 NMS 的 PyTorch 函数。该函数支持按类别对边界框进行分组,并独立地对每个类别进行 NMS。实现包括以下步骤:
接收输入参数 boxes(N, 4), N 是边界框的数量、scores(N,),其中包含每个边界框的得分)、idxs (N,) 的,包含每个边界框对应的类别索引和IoU 阈值。如果输入张量 boxes 中没有边界框,则返回一个空的张量,表示没有要保留的边界框。否则,计算每个类别的偏移量以确保边界框之间不会重叠。具体来说,将每个类别的索引乘以一个大于所有边界框坐标的最大值的值,并将其转换为与 boxes 张量相同的数据类型。将偏移后的边界框与相应的得分和类别索引一起传递给 nms 函数,以独立地对每个类别的边界框执行 NMS。返回 keep 张量,其中包含保留的边界框的索引,这些边界框已按其得分从高到低排序。
def remove_small_boxes(boxes: Tensor, min_size: float) -> Tensor:
函数remove_small_boxes用于删除至少有一个边界框较小的边界框。包括以下步骤:
接收输入参数boxes(N, 4)的张量, N 是边界框的数量和min_size(最小尺寸)。计算每个边界框的宽度和高度,并确定哪些边界框的宽度和高度都大于或等于min_size。返回keep,包含保留的边界框的索引,这些边界框的宽度和高度都大于或等于min_size。
def clip_boxes_to_image(boxes: Tensor, size: Tuple[int, int]) -> Tensor:
clip_boxes_to_image用于将边界框裁剪到给定图像的边界内。该函数包括以下步骤:
接收输入参数boxes(N, 4)的张量和size(一个二元组,表示图像的高度和宽度), 将输入张量boxes中的坐标分别提取为boxes_x和boxes_y张量,并计算图像的高度和宽度。对于JIT 模式),将 boxes_x和boxes_y张量的值裁剪到[0, width] 和 [0, height]范围内,分别代表图像的宽度和高度。对于非跟踪模式,使用 clamp函数执行相同的操作。将裁剪后的boxes_x和boxes_y张量合并为一个张量,并返回形状为(N, 4)的clipped_boxes张量,其中每个边界框的坐标都已被裁剪到图像的边界内。
def box_convert(boxes: Tensor, in_fmt: str, out_fmt: str) -> Tensor:
这是一个用于转换边界框格式的 PyTorch 函数。
xyxy:表示通过左上角和右下角的坐标表示边界框。
xywh:表示通过左上角坐标和宽度和高度表示边界框。
cxcywh:表示通过中心点坐标和宽度和高度表示边界框。
_box_xyxy_to_xywh:将边界框从 `'xyxy'` 格式转换为 `'xywh'` 格式。
_box_xyxy_to_cxcywh:将边界框从 `'xyxy'` 格式转换为 `'cxcywh'` 格式。
_box_xywh_to_xyxy:将边界框从 `'xywh'` 格式转换为 `'xyxy'` 格式。
_box_cxcywh_to_xyxy:将边界框从 `'cxcywh'` 格式转换为 `'xyxy'` 格式。
返回转换后的边界框 boxes。
def box_area(boxes: Tensor) -> Tensor:
计算边界框的面积,这个较为简答
def box_iou(boxes1: Tensor, boxes2: Tensor) -> Tensor:
计算边界框交并比,函数 box_iou 接收输入参数 boxes1 和 boxes2,分别表示两组边界框,其格式为 (x1, y1, x2, y2)。
计算两组边界框的面积 area1 和 area2,使用函数 box_area 计算每个边界框的面积。对于每个边界框对 (i, j),找到它们的左上角坐标和右下角坐标的最大值和最小值,分别记为 lt 和 rb。计算每个边界框对的宽度和高度 wh,即 wh[i,j] = rb[i,j] - lt[i,j],并将负数部分截断为0。计算每个边界框对的交集面积 inter,即 inter[i,j] = wh[i,j, 0] * wh[i,j, 1]。计算边界框对的并集面积 union,即 union[i,j] = area1[i] + area2[j] - inter[i,j]。计算边界框对的交并比 iou,即 iou[i,j] = inter[i,j] / union[i,j]。返回一个形状为 (N, M) 的 iou,N 和 M 分别为两组边界框的数量。
然后是选x(48*6)中的5个,变成了(5*6)最后的output也是5*6
最后就是将boxes恢复到原图尺寸画框框了!下一步就是将这个过程在地平线上实现了!

