
热门标签
热门文章
- 1【虚幻引擎】UE4初学者系列教程(蓝图篇)-全中文新手入门教程(含蓝图节点详细介绍,即时更新中~)_ue蓝图
- 2idea回滚代码_idea回滚pull
- 3用stm32F103标准库写mpu6050的姿态解算代码
- 4pip安装python库出现Read timed out解决办法_pip install read time out
- 5MySQL-聚合函数:聚合函数概述、GROUP BY使用、HAVING使用、SELECT的执行过程、聚合函数SQL练习_select having group by
- 6AXI Quad SPI IP核模式介绍
- 7离线环境harbor 搭建及使用_oras pull
- 8IOS系统mobileconfig的作用,mobileconfig文件如何使用,苹果超级签实现
- 9华为“天才少年”4万字演讲:现在的AI技术要么无趣,要么无用_华为技术天才
- 10mysql配置向导_MySQL安全配置向导mysql_secure_installation详解
当前位置: article > 正文
ROS学习笔记14:Gazebo仿真环境(ROS常用组件)_sudo apt-get install ros-noetic-gazebo-ros
作者:在线问答5 | 2024-08-14 09:10:32
赞
踩
sudo apt-get install ros-noetic-gazebo-ros
前言:
Gazebo是一款功能强大的三维物理仿真平台,具备强大的物理引擎、高质量的图形渲染、方便的编程与图形接口,而且开源免费。
虽然Gazebo中的机器人模型与rviz使用的模型相同,但是需要在模型中加入机器人和周围环境的物理属性,例如质量、摩擦系数、弹性系数的等。机器人的传感器信息也可以通过插件的形式加入仿真环境,以可视化的方式进行显示。
1.Gazebo安装:
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
2.Gazebo界面:
(1)输入以下指令打开gazebo:
- roscore
- rosrun gazebo_ros gazebo
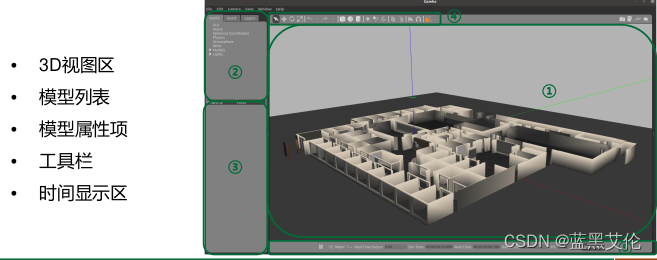
(2)界面介绍:
(3)为了验证Gazebo是否与ROS系统成功连接,
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/在线问答5/article/detail/979074
推荐阅读
相关标签

