- 1NL2SQL学习
- 22020年最全 | 少样本学习(FSL)相关综述、数据集、模型/算法和应用资源整理分享...
- 3HTML列表元素_html包括哪几类列表,各自的特点是什么
- 4论文速递 && EMNLP2022 | 接受论文抢先看!!!(内含下载列表)_a unified encoder-decoder framework with entity me
- 5TTS | 轻量级语音合成论文详解及项目实现_tts合成算法
- 6鸿蒙开发小demo_鴻蒙 graphics
- 7数据分析的新形式--自然语言搜索:NL2SQL2Graph
- 8Cocos Creator Editor 执行场景脚本
- 9微信翻译生日快乐的代码_??「30句微信隐藏文案|隐匿的小惊喜?????」
- 10C++11中静态局部变量初始化的线程安全性___cxa_guard_acquire
ubuntu22.04配置Azure Kinect DK深度相机
赞
踩
一.安装SDK
今天我来配置一下微软公司的Azure Kinect DK深度相机,以前在ubuntu18.04上配置过,因为官方说唯一支持linux版本是18.04,所以在18.04中配置还算顺利

but这不代表不可以在更高版本的ubuntu中使用,只不过需要自己去多配置一些东西
apt 源安装
更新源:
curl https://packages.microsoft.com/keys/microsoft.asc | sudo apt-key add -
sudo apt-add-repository https://packages.microsoft.com/ubuntu/22.04/prod
sudo apt-get update


接下来我们需要手动去安装一下sdk
然后按顺序解压安装

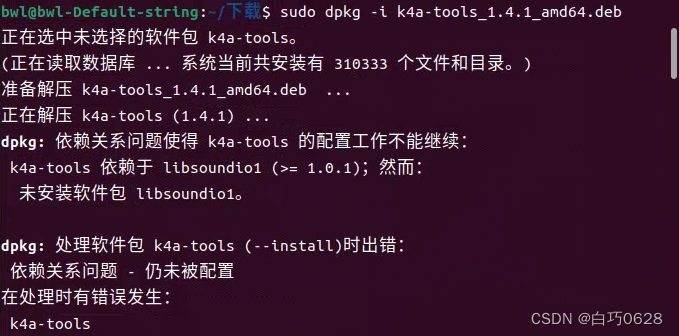
注意:在Ubuntu22.04上安装的时候,会报错缺少依赖libsoundio1,而ubuntu22.04的镜像源只有libsoundio2和libsoundio-dev
解决办法:我们需要到网上自行安装libsoundio1(有找不到的伙伴可以私信我)
![]()
然后再安装tools这个包即可。
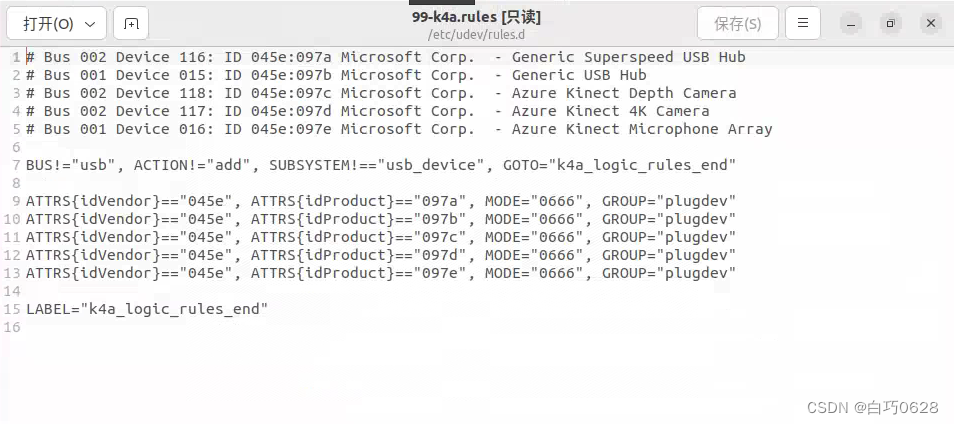
在Azure-Kinect-SensorSDK,下载整个代码,找到scripts文件夹下的99-k4a.rules,用指令:
cd ~/Azure-Kinect-Sensor-SDK
sudo cp scripts/99-k4a.rules /etc/udev/rules.d/
放到etc/udev/文件夹下即可。(也可以自行创建)
运行k4aviewer:
k4aviewer

二.使用ros2-humble-driver
这里我们需要自行去github上下载一下对应的ros2驱动包(找不到的伙伴可以私信我)

编译

运行
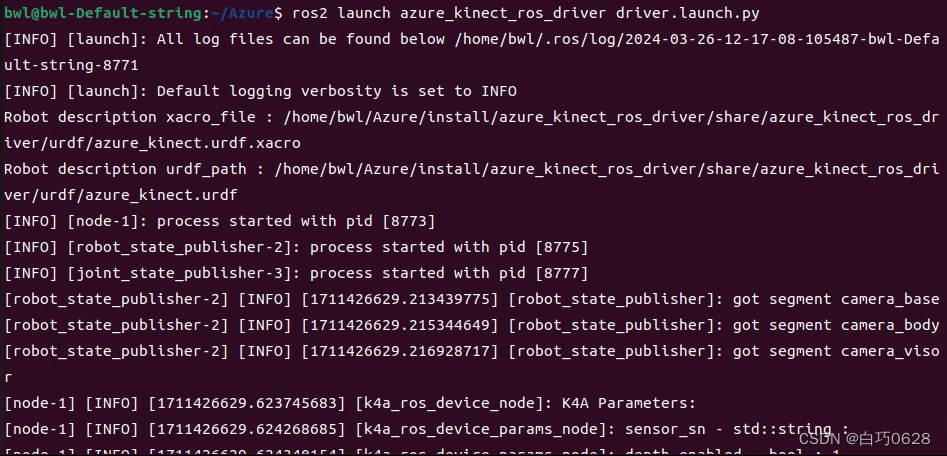
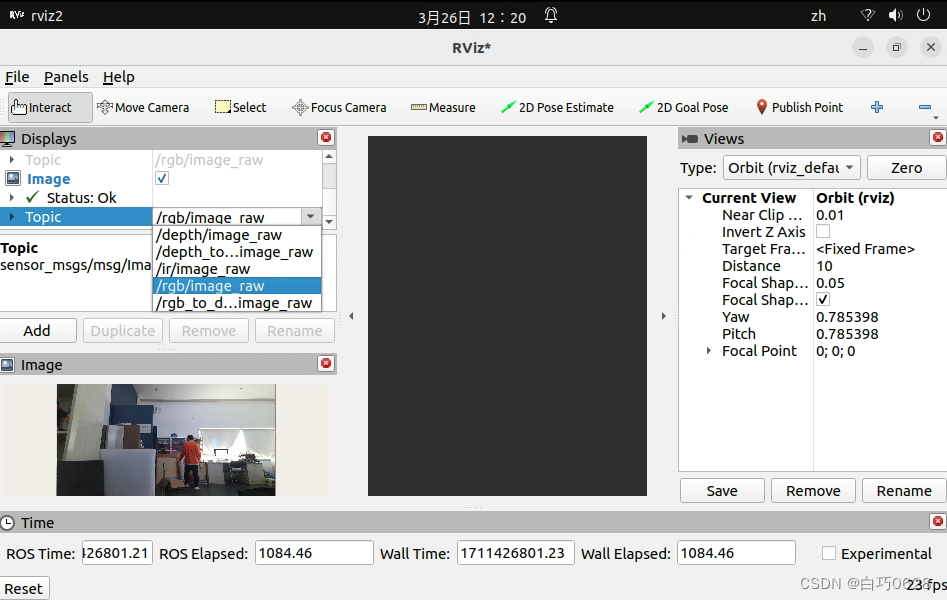
启动rviz2并添加image组件,选择对应话题就可以出来对应图像
三.find_object