
热门标签
热门文章
- 1android 大文件分割上传(分块上传)_android 文件分片上传框架
- 2数据采集的基本方法?_数据采集 csdn
- 3CNN目标检测(一):Faster RCNN详解
- 4node-red连接mysql数据库,进行数据的传输存储_nodered+数据库批量导入数据
- 5ubuntu Address already in use (地址已在使用)_ubuntu address already in use
- 6提升群辉AudioStation音乐体验,实现公网音乐播放_audio station
- 7Kali 无法连接到网络_kali temporary failure in name resolution
- 8ADB自动化测试框架
- 9银河麒麟安装rpm_(金其利)银河麒麟操作系统讲解细说
- 10人工智能--迁移学习(Transfer Learning)_transfer learning parameter
当前位置: article > 正文
FAST-LIO系列-阅读笔记
作者:凡人多烦事01 | 2024-03-09 09:22:09
赞
踩
FAST-LIO系列-阅读笔记
近期,阅读了FAST-LIO、FAST-LIO2以及Faster_LIO论文,这三篇论文都属于滤波器的SLAM算法,下面记录一下三个工作的主要贡献和不同。
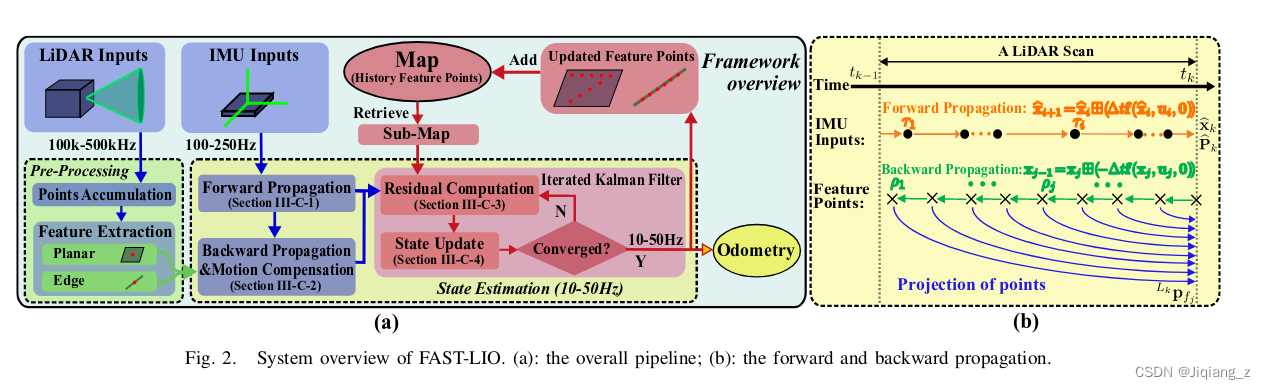
FAST-LIO
1.提出了一种计算效率高、鲁棒性强的激光雷达-惯性里程测量框架。使用紧密耦合的迭代扩展卡尔曼滤波器将激光雷达特征点与 IMU 数据融合,从而在快速运动、噪声或杂乱环境中实现稳健导航。
2.为了降低大量测量时的计算负荷,提出了一种计算卡尔曼增益的新公式。新公式的计算负荷取决于状态维度而非测量维度。
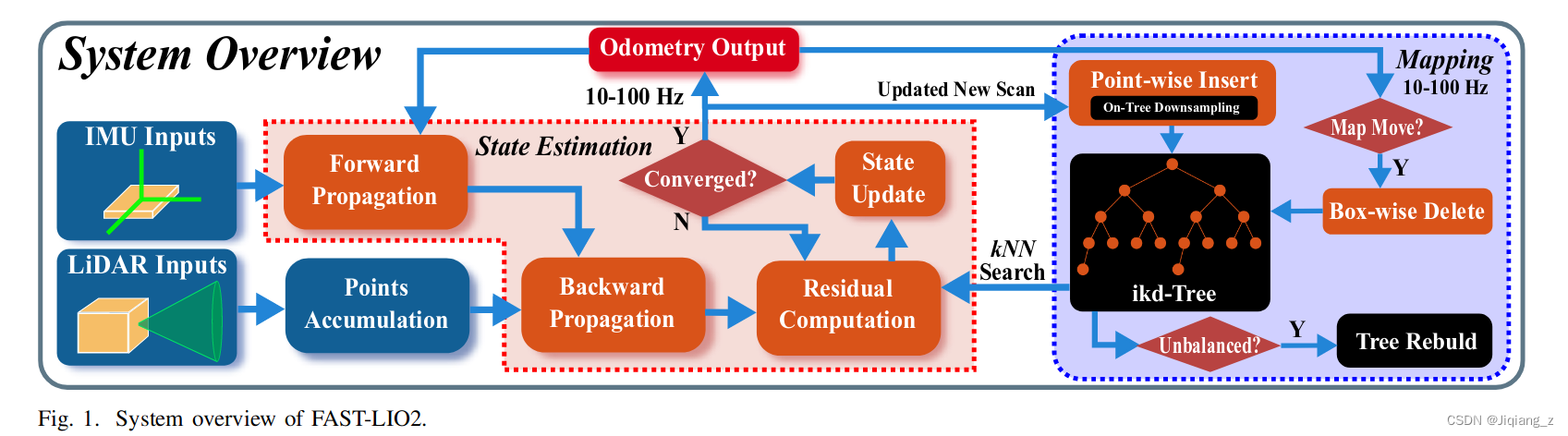
FAST-LIO2
基于FAST-LIO,FAST-LIO2主要有两点贡献:
1.第一项是直接将原始点注册到地图上(随后更新地图,即制图),用而无需提取特征。这样可以利环境中的细微特征,从而提高精度。
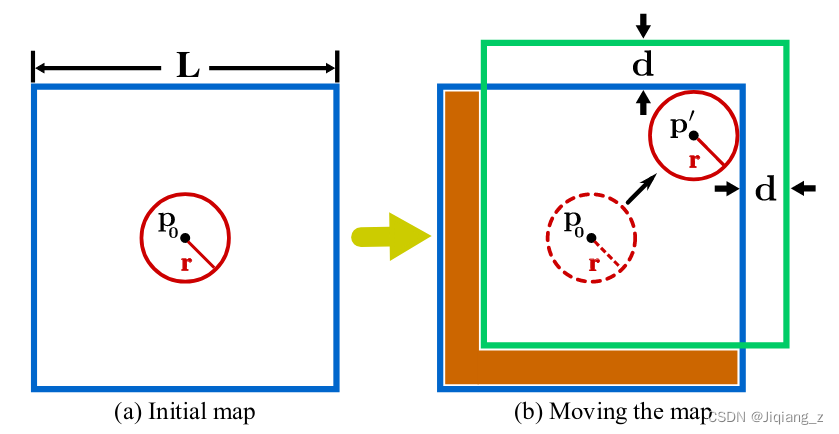
2.第二个主要创新点是通过增量 k-d 树数据结构(ikd-Tree)来维护地图,从而实现增量更新(即点插入、删除)和动态再平衡。
点云配准的方式如下:

地图更新的方式如下(局部地图):
Faster_LIO
为了实现高跟踪速度,Faster_LIO既没有使用复杂的基于树的结构来划分空间点云,也没有使用严格的k最近邻(k-NN)查询来计算点匹配。取而代之的是,使用增量体素 (iVox) 作为点云空间数据结构,它从传统体素修改而来,支持增量插入和并行近似 k-NN 查询。我们提出线性 iVox 和 PHC(伪希尔伯特曲线)iVox 作为我们算法中的两个替代底层结构。
Faster_LIO相比于FAST-LIO2的区别是提出了一种新的点云数据结构。
推荐阅读
相关标签

