
热门标签
热门文章
- 1gcc环境下 使用C/C++ 连接Mysql数据库_mysqlclient.lib
- 2使用阿里开源的Spring Cloud Alibaba AI开发第一个大模型应用_spring.cloud.ai.tongyi.chat
- 3pywebview桌面程序开发(技术路线:前端+Python,全网独一份!!!!!!)
- 4ParagonNTFSforMac_15.5.102中文版最受欢迎的NTFS硬盘格式读取工具
- 5Hive Sql中六种面试题型总结_hivesql面试必会6题经典
- 6python 迭代器与生成器
- 7Django计算机毕业设计企业固定资产信息管理系统python(源码程序+lw+远程部署)_python固定资产管理程序源代码
- 8使用Python并发执行HTTP请求
- 9详解JESD204B串行接口时钟需求及其实现方法
- 10天途重磅推出无人机教管平台3.1版及飞课APP
当前位置: article > 正文
ICRA 2022 | 基于多模态变分自编码器的任意时刻三维物体重建_icra 2022 6d of pose estimation
作者:你好赵伟 | 2024-06-13 05:25:45
赞
踩
icra 2022 6d of pose estimation
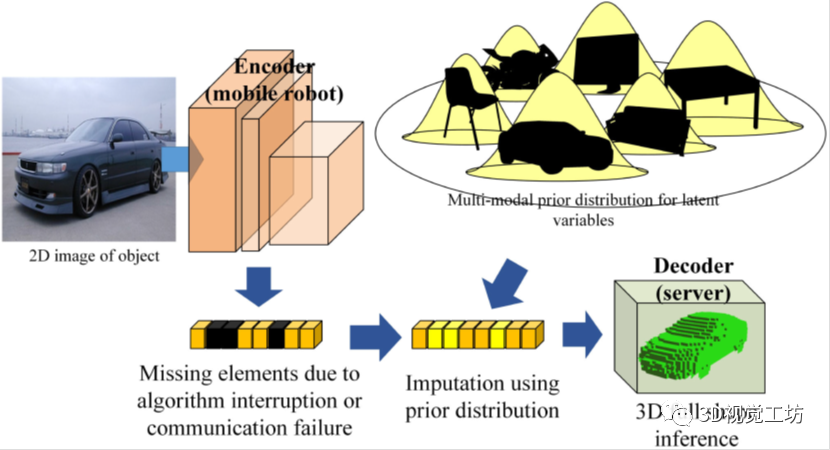
论文题目:Anytime3D Object Reconstruction Using Multi-Modal Variational Autoencoder
论文地址:https://arxiv.org/abs/2101.10391
论文来源:IEEERobotics and Automation Letters (accepted with ICRA2022 options)
摘要
对于有效的人-机器人团队,机器人能够与人类操作员分享他们的视觉感知是很重要的。在苛刻的远程协作环境中,可以利用autoencoder等数据压缩技术以紧凑的形式获取和传输潜在变量的数据。此外,为了确保即使在不稳定的环境下也能获得实时运行性能,需要一种能够从不完整信息中重建完整内容的随时估计方法。在此背景下,研究人员提出了一种方法来插补部分缺失元素的潜在变量。为了在只有几个变量维度的情况下实现anytime属性,利用类别级别的先验信息至关重要。在变分自动编码器中使用的先验分布被简单地假设为各向同性高斯分布,而与每个训练数据点的标签无关。这种类型的平坦先验使得难以从类别水平分布进行插补。研究人员通过在潜在空间中利用特定类别的多模态先验分布来克服这一限制。通过根据剩余元素找到特定模态,可以对部分传输数据中缺失
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/你好赵伟/article/detail/711062
推荐阅读

相关标签

