
- 1阿里云HBase发布冷存储特性,轻松搞定冷数据处理_运用hbase技术,存储系统中的冷数据,保证系统数据的可靠性
- 2解决npm安装时没有反应的情况_npm install 没反应
- 3Gson:Java格式化Json
- 4OpenMP并行模型
- 5Flutter关于软键盘的一些问题_flutter resizetoavoidbottominset
- 6android studio manifestplaceholders,Android Gradle使用manifestPlaceholders
- 7Android Q 10 framework_android 10framework opt
- 8状态迁移法用例设计_如果使用状态迁移图法进行用例设计,需要考虑哪些种情况。
- 9【Matlab三维路径规划】蚁群算法三维路径规划【含源码 179期】_三维蚁群算法matlab
- 10nodejs里npm运行无响应解决_nodejs项目运行没有反应
点云地面滤波--渐进式形态学滤波_渐进形态滤波
赞
踩
1 形态学滤波简介
形态学滤波主要包括腐蚀和膨胀以及二者相结合产生的开、闭操作。
腐蚀:即去除不必要的部分,简化物体的形状。举个例子:一棵大树,去掉树叶,只保留树干,用树干表示树木,即提取树木的“骨架”,保留主要信息,表示原来的物体。可以去掉一些噪点,简化点云。
膨胀:即在物体原有的基础上,增加物体的体积。举个例子:一棵大树,使得树叶增加茂密,树干更加粗壮,在视觉上显得树木细节更加丰富,依次表示原来的物体。可以修复一些空洞使得细节更加饱满。
开操作:先腐蚀后膨胀的操作称之为开操作。它具有消除细小物体,在纤细处分离物体和平滑较大物体边界的作用,使得物体的骨架更加突出。
闭操作:先膨胀后腐蚀的操作称之为闭操作。它具有填充物体内细小空洞,连接邻近物体和平滑边界的作用,同样可以使得物体骨架更加突出。
2点云渐进式形态学滤波基本原理
窗口大小对于形态学地面滤波至关重要。因此形态学地面滤波重点讨论如何确定最优的窗口大小。对于这个问题可以通过逐渐增大形态学滤波器的窗口尺寸来解决,这种方法被称为渐进式形态学滤波。下图说明这种方法的过程:
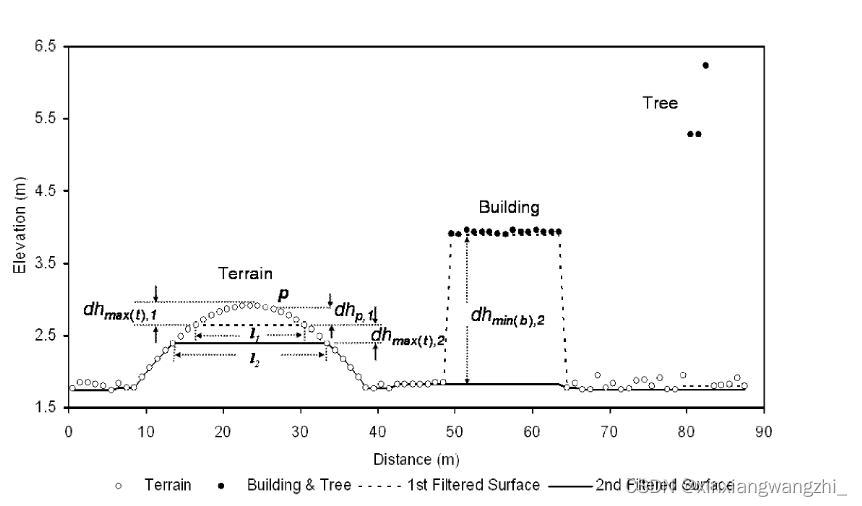
上图表示渐进式形态学滤波识别地形和建筑物量测的过程。这些点代表基于LIDAR采集的点云。第一个滤波高程面(虚线)是通过对原始点数据应用窗口大小为15 m 的开运算得到的。通过对第一个滤波曲面施加窗口大小为21 m的开运算得到第二个滤波高程曲面(实线)。
然而,在上图中的滤波过程往往会产生一个位于地形测量点云下方的表面,导致高处起伏地形顶部的测量点云被错误去除。即使在平坦的地面区域,过滤后的表面通常位于原始测量点云下方。因此,对于地形的大部分测量点云会被去除。这个问题可以通过引入基于地形、建筑物和树木的高度变化的高度差阈值来克服。下图说明了渐进式形态学滤波的主要过程:
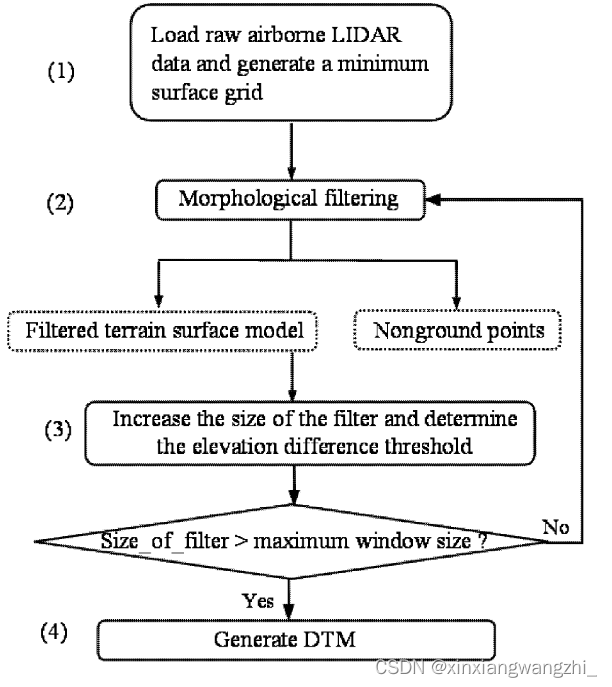
- 步骤1:加载激光雷达测量的点云坐标(x,y,z)。分为二维网格,在每个网格中选择最小高程点云,用这些点云构建最小表面网格。网格中的所有点坐标(x,y,z)存储在每个网格单元中。如果单元格不包含测量点云,则会为其指定最近距离点云。
- 步骤2:将渐进形态学开操作的滤波器应用于网格表面。在第一次迭代时,最小高程曲面和初始过滤窗口大小为过滤器做为输入(形态学滤波一共两个输入)。在接下来的迭代中,从上一次迭代中获得的过滤曲面和步骤3中增加的窗口大小被用作过滤器的输入。该步骤的输出包括:a)来自形态滤波器的进一步平滑曲面和:b)基于高程差阈值的检测到的非地面点。
- 步骤3:增加过滤器窗口的大小并计算高程差阈值。重复步骤2至3,直到过滤器窗口的大小大于预定义的最大值。此值通常设置为略大于最大建筑尺寸。
- 步骤4:最后一步是在删除非地面点云后,根据数据集生成DTM。
3参数设置
3.1窗口大小
在应用形态学滤波时,窗口大小和高差阈值的选取对取得良好的效果至关重要。对于窗口大小的选择,一个直观的选择是通过以下公式线性增加窗口大小
w
k
w_k
wk:
w
k
=
2
k
b
+
1
(1)
w_k=2 k b+1\tag{1}
wk=2kb+1(1)
k
k
k:迭代次数,
b
b
b:初始窗口大小。然而,对于具有大型非地面物体的区域,需要相当长的计算时间。
或者也可以采用下面这种方法:
w
k
=
2
b
k
+
1
(2)
w_k=2 b^k+1\tag{2}
wk=2bk+1(2)
3.2高差阈值
高差阈值可根据研究区地形坡度确定。假设坡度不变,地形最大高差
d
h
max
(
t
)
,
k
d h_{\max (t), k}
dhmax(t),k、窗口大小
w
k
w_k
wk与地形坡度
s
s
s之间存在关系:
s
=
d
h
max
(
t
)
,
k
(
w
k
−
w
k
−
1
)
2
(3)
s=\frac{d h_{\max (t), k}}{\frac{\left(w_k-w_{k-1}\right)}{2}}\tag{3}
s=2(wk−wk−1)dhmax(t),k(3)
高差阈值
d
h
T
,
k
d h_{T, k}
dhT,k:
d
h
T
,
k
=
{
d
h
0
,
if
w
k
≤
3
s
(
w
k
−
w
k
−
1
)
c
+
d
h
0
,
if
w
k
>
3
d
h
max
,
if
d
h
T
,
k
>
d
h
max
(4)
d h_{T, k}=
d
h
0
dh_0
dh0:初始高差阈值,
s
s
s:坡度,
c
c
c:网格尺寸,
d
h
m
a
x
dh_{max}
dhmax:最大高差阈值,
k
k
k:迭代次数。
在城市地区,主要的非地面物体包括汽车、树木和建筑物。单个汽车和树木的尺寸远小于建筑物的尺寸,因此大多数汽车和树木通常在前几次迭代中被移除,而大型建筑物将在最后被移除。最大高差阈值可以设置为固定高度(例如,最低建筑高度),以确保识别建筑群。通常通过反复比较过滤和未过滤的数据来达到最佳效果。另一方面,山区的非地面物体主要是植被(树木)。不需要设置固定的最大高差阈值来移除树木,通常将其设置为研究区域内最大的高差。
4算法流程
4.1输入:
- 原始点云
- 网格尺寸
- 初始窗口大小 b b b
- 最大窗口尺寸 m a x − w i n d o w − s i z e max-window-size max−window−size
- 坡度 s s s
- 初始高差阈值 d h 0 dh_0 dh0
- 最大高差阈值 d h m a x dh_{max} dhmax
4.2输出:
- 地面点与非地面点
4.3算法流程:
1.计算
x
,
y
x,y
x,y最大值最小值
2.划分
m
∗
n
m*n
m∗n二维网格:
m
=
m=
m= floor
[
(
max
(
y
)
−
min
(
y
)
)
/
c
]
+
1
[(\max (y)-\min (y)) / c]+1
[(max(y)−min(y))/c]+1 and
n
=
n=
n= floor
[
(
max
(
x
)
−
min
(
x
)
)
/
c
]
+
1
[(\max (x)-\min (x)) / c]+1
[(max(x)−min(x))/c]+1
3.将点云坐标放进二维数组
A
[
m
,
n
]
A[m,n]
A[m,n](二维数组表示网格)中。遍历每个点,根据其x和y坐标,确定该点落在哪个网格中。如果同一网格单元中有多个点,选择高程最小的点。
4.使用最近邻法插值A中不包含任何点的网格。将这些插值网格的x和y坐标设置为零,以将它们与包含激光雷达点的网格单元区分开来。将A复制到B。用0初始化二维数组的元素。
5.用公式(1)或(2)计算
w
k
w_k
wk,
w
k
<
m
a
x
−
w
i
n
d
o
w
−
s
i
z
e
w_k<max-window-size
wk<max−window−size
6.
d
h
T
=
d
h
0
dh_T=dh_0
dhT=dh0
07. for each window size
w
k
w_k
wk
08.
\quad
for
i
=
1
i=1
i=1 to
m
m
m
09.
\quad\quad
P
i
=
A
[
i
;
]
(
A
[
i
;
]
P_i=A[i ;](A[i ;]
Pi=A[i;](A[i;] represents a row of points at row
i
i
i in
A
A
A and
P
i
P_i
Pi is a
1
−
1-
1− D array)
10.
\quad\quad
Z
←
P
i
Z \leftarrow P i
Z←Pi (Assign elevation values from
P
i
P_i
Pi to a 1-D elevation array
Z
Z
Z )
11.
\quad\quad
Z
f
=
erosion
(
Z
,
w
k
)
Z_f=\operatorname{erosion}\left(Z, w_k\right)
Zf=erosion(Z,wk)
12.
\quad\quad
Z
f
=
dilation
(
Z
f
,
w
k
)
Z_f=\operatorname{dilation}\left(Z_f, w_k\right)
Zf=dilation(Zf,wk)
13.
\quad\quad
P
i
←
Z
f
P_i \leftarrow Z_f
Pi←Zf (Replace
z
z
z values of
P
i
P_i
Pi with the values from
Z
f
)
\left.Z_f\right)
Zf)
14.
\quad\quad
A
[
i
;
]
=
P
i
A[i ;]=P_i
A[i;]=Pi (Put the filtered row of points
P
i
P_i
Pi
back to row
i
i
i of array
A
A
A )
15.
\quad\quad
for
j
=
1
j=1
j=1 to
n
n
n
16.
\quad
\quad\quad\quad
if
Z
[
j
]
−
Z
f
[
j
]
>
d
h
T
Z[j]-Z_f[j]>d h_T
Z[j]−Zf[j]>dhT then flag
[
i
,
j
]
=
w
k
[i, j]=w_k
[i,j]=wk
17.
\quad\quad
end for
j
j
j loop
18.
\quad
end for
i
i
i loop
19.
\quad
if
(
d
h
T
>
d
h
max
)
\left(d h_T>d h_{\max }\right)
(dhT>dhmax)
20.
\quad
d
h
T
=
d
h
max
\quad d h_T=d h_{\max }
dhT=dhmax
21.
\quad
else
22.
\quad
d
h
T
=
s
(
w
k
−
w
k
−
1
)
c
+
d
h
0
\quad d h_T=s\left(w_k-w_{k-1}\right) c+d h_0
dhT=s(wk−wk−1)c+dh0
23. end for window size loop
24. for
i
=
1
i=1
i=1 to
m
m
m
25.
\quad
for
j
=
1
j=1
j=1 to
n
n
n
26.
\quad
\quad
if
(
B
[
i
,
j
]
(
x
)
>
0
(B[i, j](x)>0
(B[i,j](x)>0 and
B
[
i
,
j
]
(
y
)
>
0
)
B[i, j](y)>0)
B[i,j](y)>0)
27.
\quad
\quad
\quad
if
(
(
( flag
[
i
,
j
]
=
0
)
[i, j]=0)
[i,j]=0)
28.
\quad
\quad
\quad
\quad
B
[
i
,
j
]
B[i, j]
B[i,j] is a ground point
29.
\quad
\quad
\quad
else
30.
\quad
\quad
\quad
\quad
B
[
i
,
j
]
B[i, j]
B[i,j] is a nonground point
31.
\quad
end for
j
j
j loop
32. end for
i
i
i loop
Erosion
(
Z
,
w
k
)
‾
\underline{\operatorname{Erosion}\left(Z, w_k\right)}
Erosion(Z,wk) :
- for j = 1 j=1 j=1 to n n n
- Z f [ j ] = min j − [ w k / 2 ] ≤ l ≤ j + [ w k / 2 ] ( Z [ l ] ) Z_f[j]=\min _{j-\left[w_k / 2\right] \leq l \leq j+\left[w_k / 2\right]}(Z[l]) Zf[j]=minj−[wk/2]≤l≤j+[wk/2](Z[l])
- return Z f Z_f Zf
Dilation ( Z , w k ) \left(Z, w_k\right) (Z,wk) :
- for j = 1 j=1 j=1 to n n n
- Z f [ j ] = max j − [ w k / 2 ] ≤ l ≤ j + [ w k / 2 ] ( Z [ l ] ) Z_f[j]=\max _{j-\left[w_k / 2\right] \leq l \leq j+\left[w_k / 2\right]}(Z[l]) Zf[j]=maxj−[wk/2]≤l≤j+[wk/2](Z[l])
- return Z f Z_f Zf
5渐进式形态学滤波在PCL应用:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/segmentation/progressive_morphological_filter.h>
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointIndicesPtr ground(new pcl::PointIndices);
pcl::io::loadPCDFile<pcl::PointXYZ>("SHCSCloud副本.pcd", *cloud);
std::cout << "Cloud before filtering: " << std::endl;
std::cout << cloud->points.size() << std::endl;
// Create the filtering object
pcl::ProgressiveMorphologicalFilter<pcl::PointXYZ> pmf;
pmf.setInputCloud(cloud);
pmf.setCellSize(2.0);
pmf.setBase(1.0);
pmf.setMaxWindowSize(5);
pmf.setSlope(1.0f);
pmf.setInitialDistance(0.5f);
pmf.setMaxDistance(5.0f);
pmf.extract(ground->indices);
// Create the filtering object
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud);
extract.setIndices(ground);
extract.filter(*cloud_filtered);
std::cout << "Ground cloud after filtering: " << std::endl;
std::cout << cloud_filtered->points.size() << std::endl;
pcl::io::savePCDFile <pcl::PointXYZ>("ground.pcd", *cloud_filtered, false);
// Extract non-ground returns
extract.setNegative(true);
extract.filter(*cloud_filtered);
std::cout << "Object cloud after filtering: " << std::endl;
std::cout << cloud_filtered->points.size() << std::endl;
pcl::io::savePCDFile("object.pcd", *cloud_filtered, false);
return (0);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
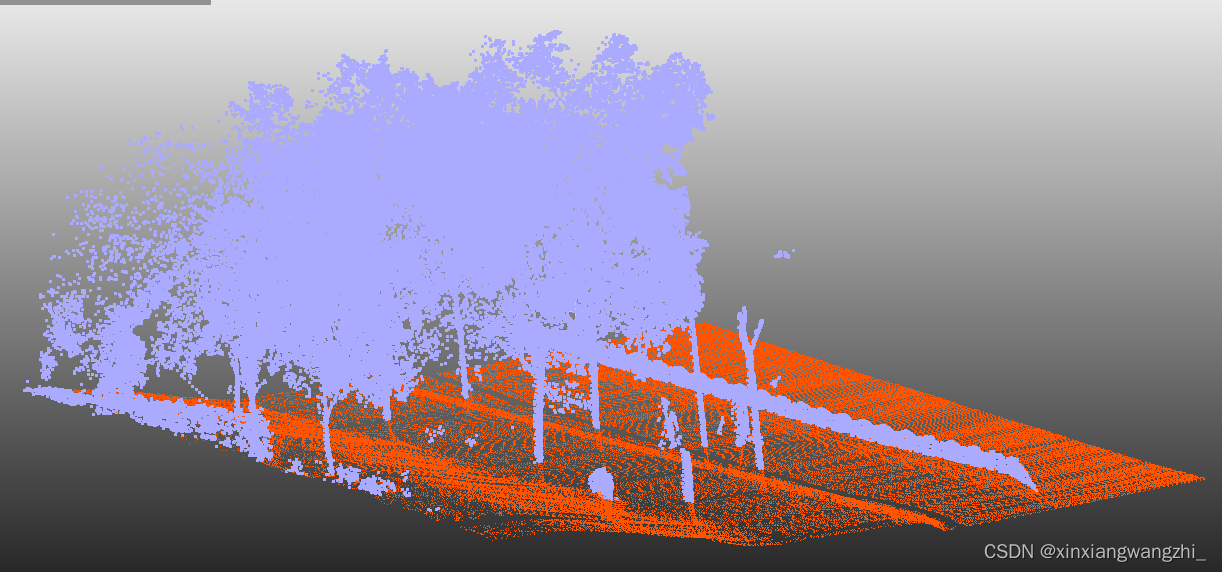
过滤效果:
参考
形态学简介
pcl
《A progressive morphological filter for removing nonground measurements from airborne LIDAR data》

