
热门标签
热门文章
- 1鸿蒙媒体开发【基于AVCodec能力的视频编解码】音频和视频
- 2DatawhaleAI夏令营第二期NLP方向Task3笔记
- 3Shell中取时间格式方法_shell 两位年
- 4【人工智能】-- 迁移学习_迁移学习方式有哪些csdn
- 5【论文翻译】ZERO-SHOT VISUAL IMITATION_zeroshotagent
- 6良许Linux | Linux 下使用 killall 命令终止进程的 8 大用法_killall杀进程
- 7安全狗SQL注入绕过_绕过安全狗的sql注入
- 8Docker pull timeout_docker deamon.json 设置 pull-timeout
- 9CRC校验码详解、常见算法实现及代码实例
- 10这些软件测试行业的内幕你知道多少?_软件测试培训内幕+知乎
当前位置: article > 正文
ROS知识2:ROS2运行小海龟程序例程_ros2海龟
作者:从前慢现在也慢 | 2024-08-15 07:01:10
赞
踩
ros2海龟
ROS知识2:ROS2运行小海龟程序例程
本文目的
安装好ROS2之后,运行小海龟程序测试程序
前置知识点
运行环境
远程Linux服务器ubuntu18.04,ROS2版本为Eloquent (Ubuntu Bionic)
运行步骤
安装小海龟代码
sudo apt update
sudo apt install ros-eloquent-turtlesim
- 1
- 2
运行turtlesim_node
会出现如下的界面是一只小海龟
ros2 run turtlesim turtlesim_node
- 1
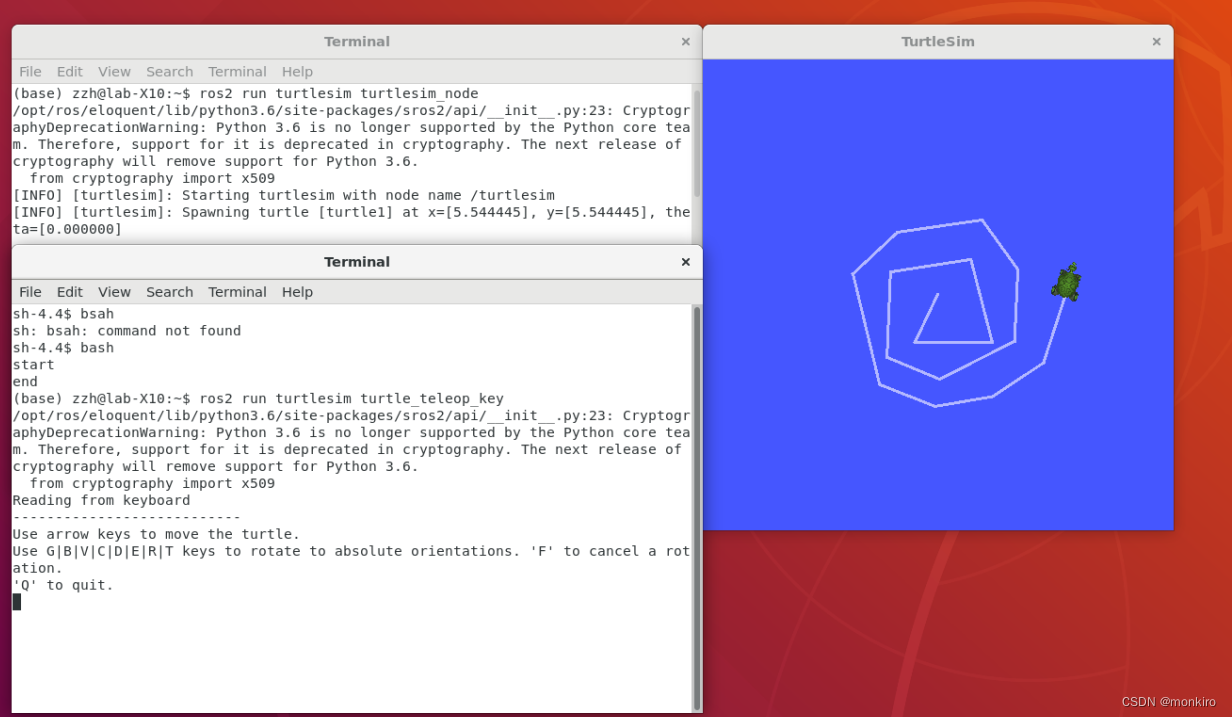
运行turtle_teleop_key
是一个用键盘控制小海龟的程序,会和前面的turtlesim_node节点建立通信连接,可以使用键盘对小海龟进行操作移动了。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/982476
推荐阅读
相关标签

