
热门标签
热门文章
- 1《价值》读书笔记_we only do things that make sense巴菲特
- 2大模型讲习班丨智源刘广&张博文:悟道·天鹰Aquila 语言大模型及开源生态
- 3抹机王怎么一键新机_ir新机工具箱手机版下载-ir新机抹机王盒子v5.6.6 免登陆版-007游戏网...
- 4【Linux】Linux下的写时拷贝技术(copy on write)_linux版本 引入了“写时复制
- 5HarmonyOS介绍_harmonyos简介
- 6数据结构——(超详细,超简单)二叉树的实现
- 7深度学习环境搭建(二)之 CUDA Driver 安装
- 8Android Studio 怎么连接MUMU模拟器并永久使用_mumu模拟器连接android studio
- 9SliderETS(鸿蒙Demo)_slider_structer
- 10龙哥风向标 20230321~20230328 GPT拆解
当前位置: article > 正文
ros+科大迅飞语音包+图灵机器人(三)通过图灵进行语义理解_tuling_nlu.cpp
作者:weixin_40725706 | 2024-03-12 19:17:05
赞
踩
tuling_nlu.cpp
- 首先我们需要下载
- sduo apt install libcurl3 libcurl4-openssl-dev
- sudo apt install libjsoncpp0 libjsoncpp-dev
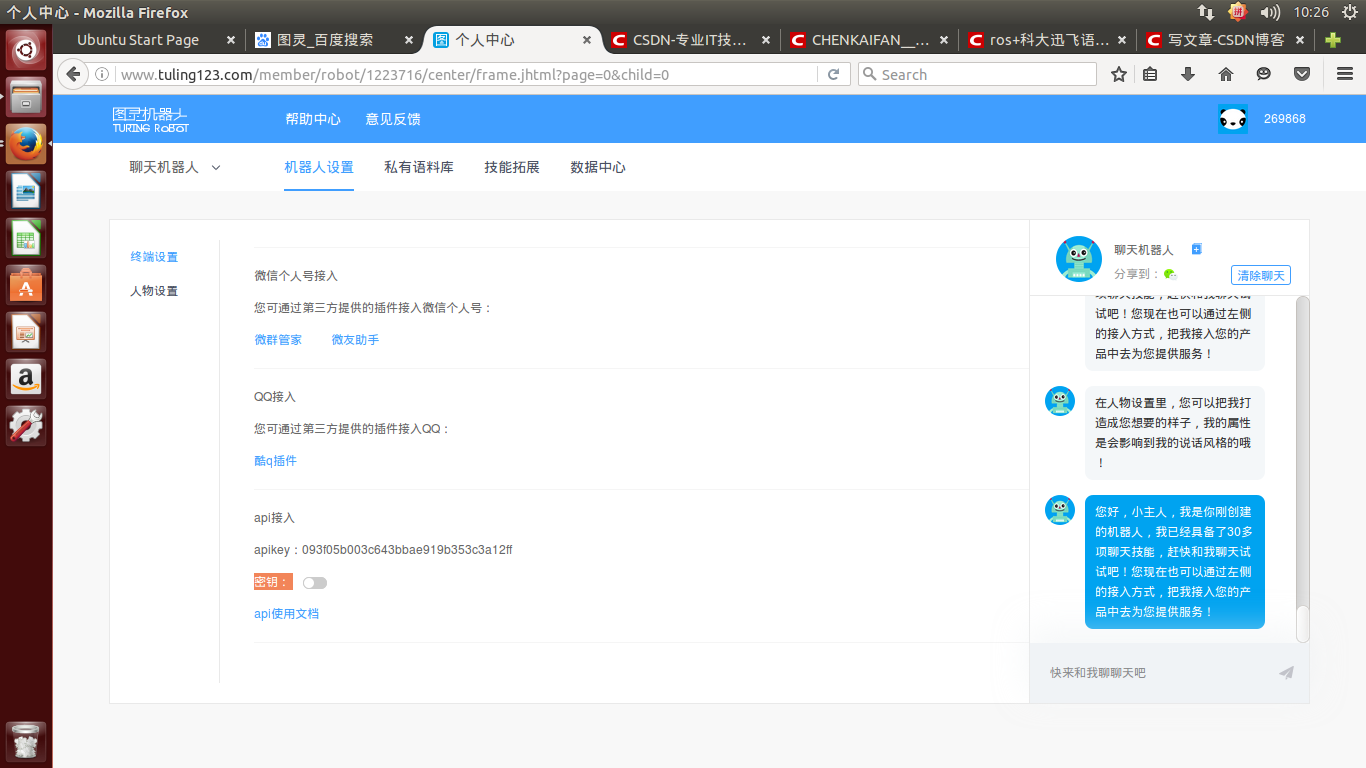
- 然后到图灵的官网(http://www.tuling123.com/)申请一个帐号 ,申请完后,需要创建一个机器人,我这里的机器人叫”聊天机器人“,创建好后你会获得一个密匙,我们需要把密匙后的开关关掉,不然等下会出错
- 在vioce_system 包中的src文件夹下创建一个tuling_nlu.cpp文件
- 以下是tuling_nlu.cpp的内容(注意,需要把代码中的key改为自己创建机器人的key,把 curl_easy_setopt(pCurl, CURLOPT_URL, "http://openapi.tuling123.com/openapi/api");
中的网址改为自己机器人的接口地址,这个地址可以在机器人的api文档中找到) - #include<ros/ros.h>
- #include<std_msgs/String.h>
- #include<iostream>
- #include<sstream>
- #include<jsoncpp/json/json.h>
- #include<curl/curl.h>
- #include<string>
- #include<exception>
- using namespace std;
- int flag = 0;
- string result;
- int writer(char *data, size_t size, size_t nmemb, string *writerData)
- {
- unsigned long sizes = size * nmemb;
- if (writerData == NULL)
- return -1;
- writerData->append(data, sizes);
- return sizes;
- }
- int parseJsonResonse(string input)
- {
- Json::Value root;
- Json::Reader reader;
- bool parsingSuccessful = reader.parse(input, root);
- if(!parsingSuccessful)
- {
- std::cout<<"!!! Failed to parse the response data"<< std::endl;
- return -1;
- }
- const Json::Value code = root["code"];
- const Json::Value text = root["text"];
- result = text.asString();
- flag = 1;
- std::cout<< "response code:" << code << std::endl;
- std::cout<< "response text:" << result << std::endl;
- return 0;
- }
- int HttpPostRequest(string input)
- {
- string buffer;
- std::string strJson = "{";
- strJson += "\"key\" : \"093f05b003c643bbae919b353c3a12ff\","; //双引号前加/防转仪
- strJson += "\"info\" : ";
- strJson += "\"";
- strJson += input;
- strJson += "\"";
- strJson += "}";
- std::cout<<"post json string: " << strJson << std::endl;
- try
- {
- CURL *pCurl = NULL;
- CURLcode res;
- // In windows, this will init the winsock stuff
- curl_global_init(CURL_GLOBAL_ALL);
- // get a curl handle
- pCurl = curl_easy_init();
- if (NULL != pCurl)
- {
- // 设置超时时间为10秒
- curl_easy_setopt(pCurl, CURLOPT_TIMEOUT, 10);
- // First set the URL that is about to receive our POST.
- // This URL can just as well be a
- // https:// URL if that is what should receive the data.
- curl_easy_setopt(pCurl, CURLOPT_URL, "http://openapi.tuling123.com/openapi/api");
- //curl_easy_setopt(pCurl, CURLOPT_URL, "http://192.168.0.2/posttest.cgi");
- // 设置http发送的内容类型为JSON
- curl_slist *plist = curl_slist_append(NULL,"Content-Type:application/json;charset=UTF-8");
- curl_easy_setopt(pCurl, CURLOPT_HTTPHEADER, plist);
- // 设置要POST的JSON数据
- curl_easy_setopt(pCurl, CURLOPT_POSTFIELDS, strJson.c_str());
- curl_easy_setopt(pCurl, CURLOPT_WRITEFUNCTION, writer);
- curl_easy_setopt(pCurl, CURLOPT_WRITEDATA, &buffer);
- // Perform the request, res will get the return code
- res = curl_easy_perform(pCurl);
- // Check for errors
- if (res != CURLE_OK)
- {
- printf("curl_easy_perform() failed:%s\n", curl_easy_strerror(res));
- }
- // always cleanup
- curl_easy_cleanup(pCurl);
- }
- curl_global_cleanup();
- }
- catch (std::exception &ex)
- {
- printf("curl exception %s.\n", ex.what());
- }
- if(buffer.empty())
- {
- std::cout<< "!!! ERROR The Tuling sever response NULL" << std::endl;
- }
- else
- {
- parseJsonResonse(buffer);
- }
- return 0;
- }
- void arvCallBack(const std_msgs::String::ConstPtr &msg)
- {
- std::cout<<"your quesion is: " << msg->data << std::endl;
- HttpPostRequest(msg->data);
- }
- int main(int argc, char **argv)
- {
- ros::init(argc, argv,"tuling_nlu_node");
- ros::NodeHandle nd;
- ros::Subscriber sub = nd.subscribe("voice/tuling_nlu_topic", 10, arvCallBack);
- ros::Publisher pub = nd.advertise<std_msgs::String>("/voice/xf_tts_topic", 10);
- ros::Rate loop_rate(10);
- while(ros::ok())
- {
- if(flag)
- {
- std_msgs::String msg;
- msg.data = result;
- pub.publish(msg);
- flag = 0;
- }
- ros::spinOnce();
- loop_rate.sleep();
- }
- }

- 在CMakeList文件中加入
- add_executable(tuling_nlu_node src/tuling_nlu.cpp)
- target_link_libraries(tuling_nlu_node ${catkin_LIBRARIES} -lcurl -ljsoncpp)
- 修改好的CMakeList如下
- cmake_minimum_required(VERSION 2.8.3)
- project(voice_system)
- find_package(catkin REQUIRED COMPONENTS
- roscpp
- rospy
- std_msgs
- )
- include_directories(
- include
- ${catkin_INCLUDE_DIRS}
- )
- add_executable(xf_tts_node src/xf_tts.cpp)
- target_link_libraries(xf_tts_node ${catkin_LIBRARIES} -lmsc -lrt -ldl -lpthread)
- add_executable(tuling_nlu_node src/tuling_nlu.cpp)
- target_link_libraries(tuling_nlu_node ${catkin_LIBRARIES} -lcurl -ljsoncpp)
- 在catkin_ws编译一下
- $ cd catkin_ws
- $ catkin_make
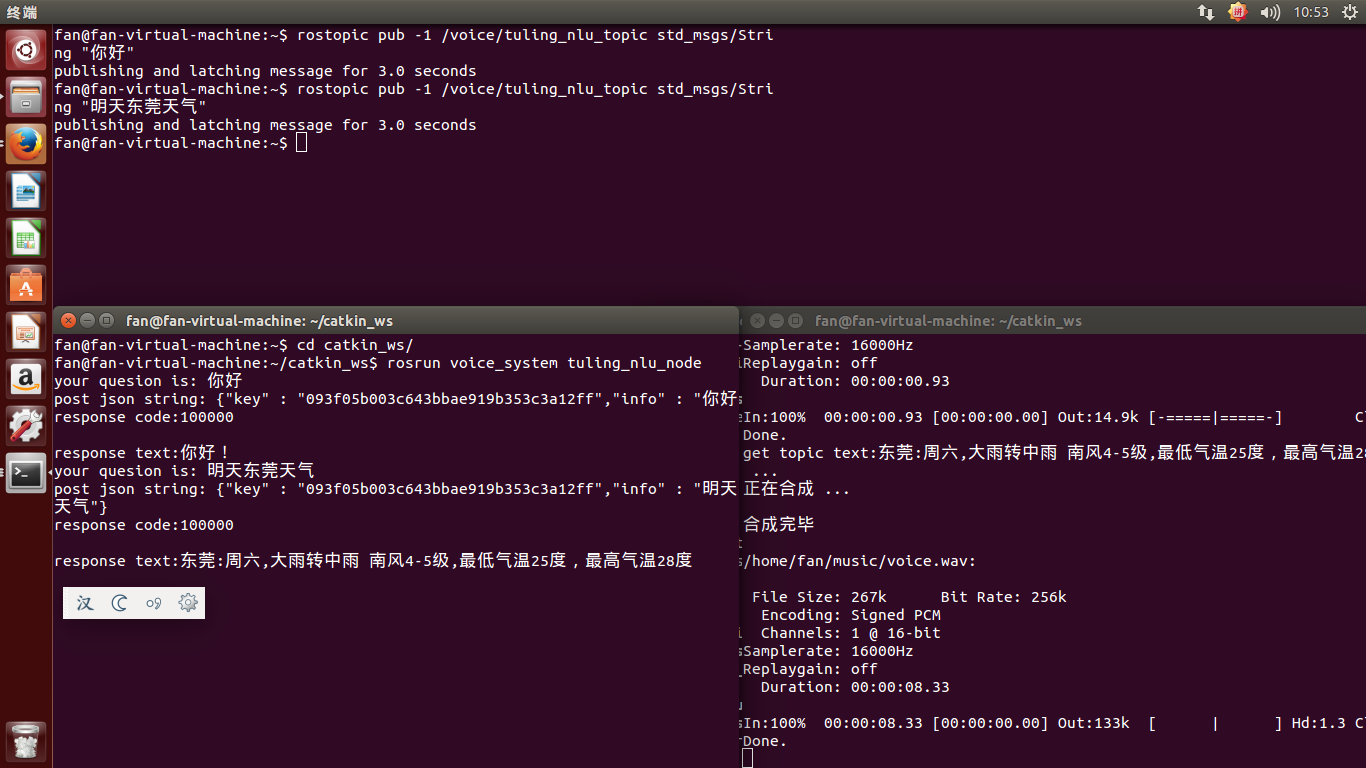
- 现在就可以和机器人对话了
- 首先roscore一下,在catkin_ws下运行xf_tts_node节点和tuling_nlu_node节点
- $ rosrun voice_system xf_tts_node
- $ rosrun voice_system tuling_nlu_node
- $ rostopic pub -1 /voice/tuling_nlu_topic std_msgs/String "明天东莞天气"
- 在此,你便能听到图灵机器人的回复了
该文章主要是对自己学习的一些总结,方便以后学习,也对学习该方面的人提供一些帮助,如有问题请指出。
同时该文章也借鉴了ros小课堂的一些内容。声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/225474
推荐阅读
相关标签

