
热门标签
热门文章
- 1T5模型 在OCNLI 训练微调 4_t5 csc 微调loss
- 2华为OD 2024 | 什么是华为OD,OD 薪资待遇,OD机试题清单_华为od等级d1-d5薪资表
- 3数据挖掘与分析——微博评论情感分析_微博 带情感标注 新浪微博,正负向评论约各 5 万条
- 4SpringCloud 微服务实战5 - Stream消息驱动、Sleuth 分布式请求链路跟踪_服务跟踪sleuth
- 5Canny 边缘检测算法-python实现(附代码)_canny边缘检测算法代码
- 6使用OpencvSharp实现人脸识别
- 7线程安全(二)java中的CAS机制_java cas机制
- 8大学生毕设神器 | 电影分析 电影爬虫 基于Python的电影可视化分析 基于大数据的电影可视化分析 基于K-means的电影满意度分析_电影数据可视化分析
- 9PySide6————多线程技术(QTimer、QThread、事件处理)_pyside6 qthread
- 10敏捷项目管理流程-Scrum框架最全总结!_在规划迭代时,scrum中的某个角色会按工作项优先级从高到低进行奢求讲解和澄清,以
当前位置: article > 正文
【论文解读】LaneNet 基于实体分割的端到端车道线检测
作者:Li_阴宅 | 2024-07-17 17:32:33
赞
踩
lanenet
前言
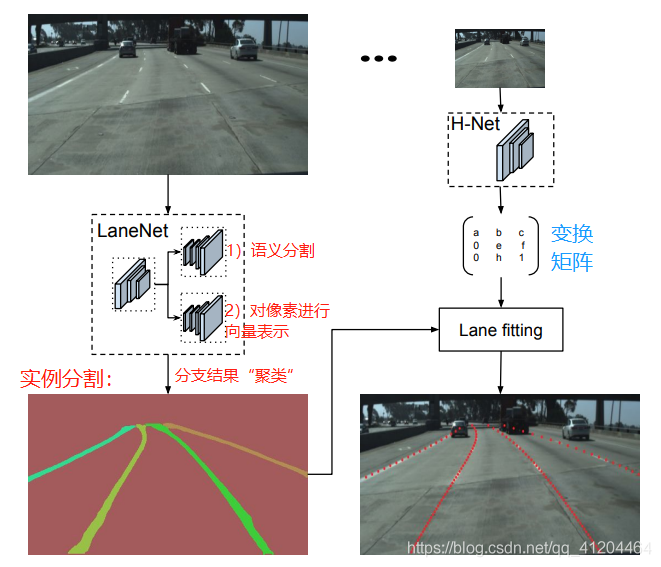
这是一种端到端的车道线检测方法,包含 LanNet + H-Net 两个网络模型。
LanNet 是一种多任务模型,它将 实例分割 任务拆解成“语义分割”和“对像素进行向量表示”,然后将两个分支的结果进行聚类,得到实例分割的结果。
H-Net 是个小网络,负责预测变换矩阵 H,使用转换矩阵 H 对同属一条车道线的所有像素点进行重新建模。即:学习给定输入图像的透视变换参数,该透视变换能够对坡度道路上的车道线进行良好地拟合。
整体的网络结构如下:
论文地址:Towards End-to-End Lane Detection: an Instance Segmentation Approach
开源数据集TuSimple:https://github.com/TuSimple/tusimple-benchmark/issues/3
目录
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Li_阴宅/article/detail/841143
推荐阅读
相关标签

