
热门标签
热门文章
- 12024年最全一文带你了解——安服岗和渗透岗的区别_安服转渗透容易吗(3)
- 2【Home Assistant】HACS 安装_安装hacs后在集成中找不到
- 3实战Java高并发程序设计 PDF
- 4css设置滚动条透明和自定义_::-webkit-scrollbar{ width: 0; height: 0; color: t
- 5Stable Diffusion 3 如何下载安装使用及性能优化
- 6机器学习Notes之One-Hot编码_dataframe one-hot编码
- 7Spark系列二:SparkCore的RDD算子Transformation和Action详解_rdd上支持的transformation和action算子
- 8新书速览|PyTorch 2.0深度学习从零开始学_pytorch2.0深度学习从零开始学 pdf
- 9华为OD机试C卷-- 二叉树的广度优先遍历(Java & JS & Python & C)_二叉树的广度优先遍历 华为od
- 10GPT实战系列-LangChain构建自定义Agent_langchain 自定义agent
当前位置: article > 正文
6、双足机器人mpc构建
作者:Li_阴宅 | 2024-07-02 04:27:20
赞
踩
6、双足机器人mpc构建
-
-
- 状态方案预处理
-
由质心动力学状态方程将{状态递推序列x}展开:
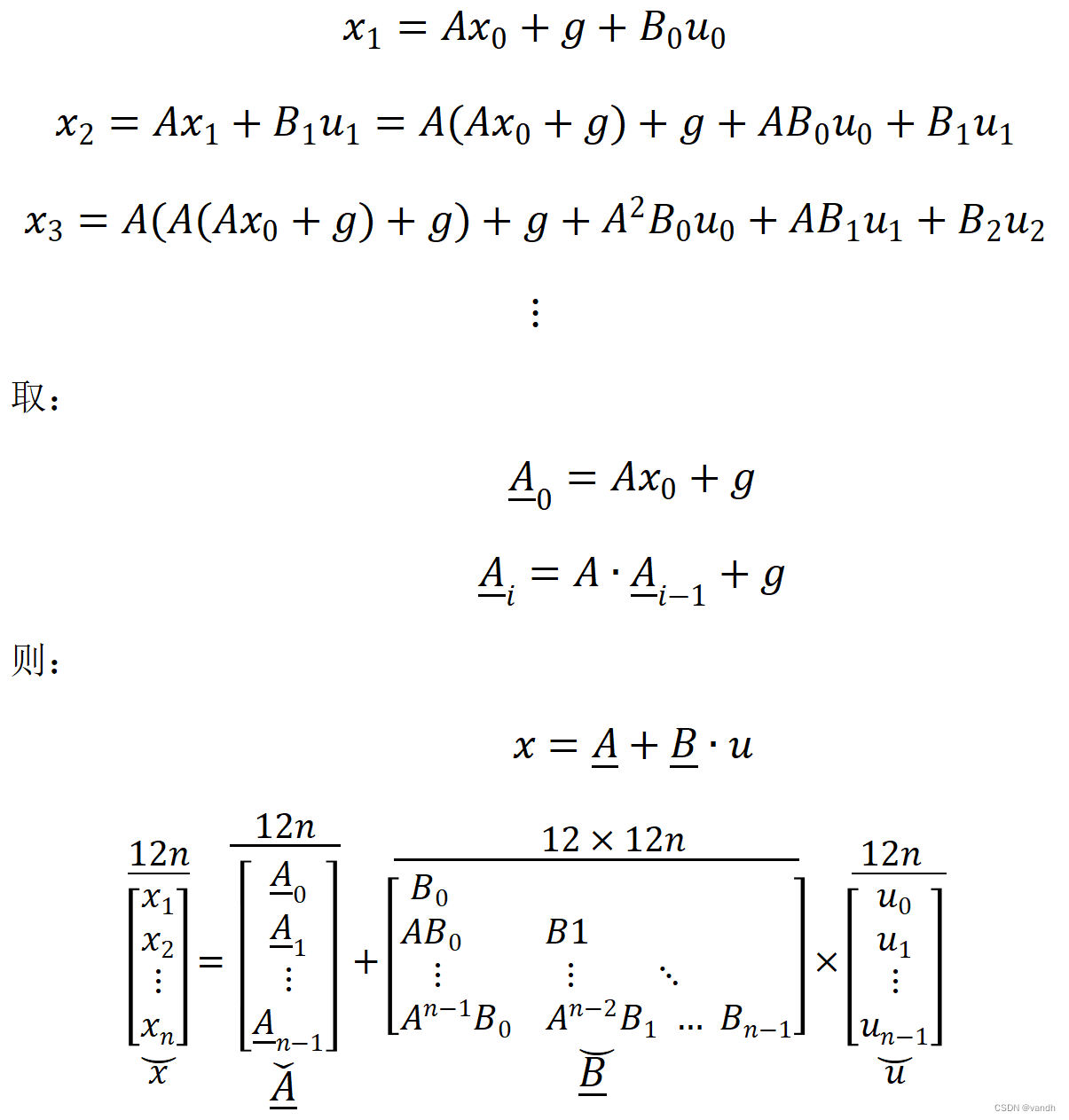
其中:
- x为状态递推序列,其下是堆叠矩阵表达式。xn为n时刻的状态变量,un-1为n-1时刻的输入变量。
- 输出y=x,参考目标Refer=0,误差e=y-Refer=x-0=x,n为预测空间;
-
-
- 二次规划
-
前述建立了空间状态方程,接下来就可以对未来时刻的输入量进行优化,优化问题会转换成一个代价函数,
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Li_阴宅/article/detail/778584
推荐阅读
相关标签

