
热门标签
热门文章
- 1PyCharm免费安装和新手使用教程_pycharm免费版
- 2Pytorch实现Seq2Seq(Attention)字符级机器翻译_nn.module 简单翻译
- 3Nginx使用SSL加密并隐藏真实地址详细教程_nginx 隐藏真实的url
- 4鼠标悬停,出现另一个元素,点击这个元素的解决方法_悬浮元素出现一个按钮
- 5Keras-5-深度学习用于文本和序列-处理文本数据_keras 预训练网络一维序列分类
- 62018android面试宝典,2024京东Android面试真题解析
- 7【VSCode】支持argparser/接受命令行参数_argparse vscode
- 8前端调取接口格式vue_前端network里的接口变成了collect,该怎样转变回正常网址
- 9人工智能程序员应该有什么职业素养?_keeping neural networks simple by minimizing the d
- 10强光环境下阴影消除算法_去除路面阴影干扰的算法
当前位置: article > 正文
深入理解计算机系统 CSAPP 家庭作业6.45
作者:IT小白 | 2024-06-26 00:06:59
赞
踩
深入理解计算机系统 CSAPP 家庭作业6.45
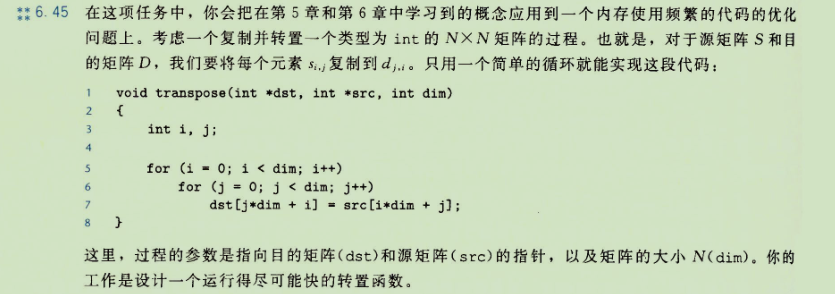
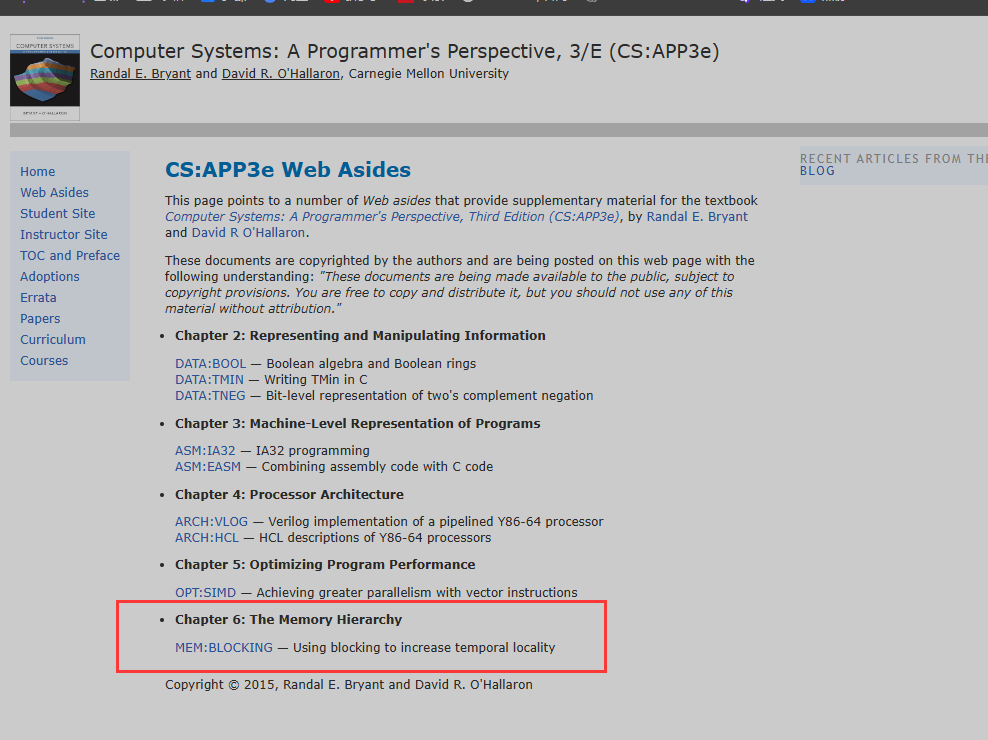
CS:APP3e, Bryant and O'Hallaron 可以参考这里
- void bijk(array A, array B, array C, int n, int bsize) {
- int i, j, k, kk, jj;
- double sum;
- int en = bsize*(n/bsize);
- for (i = 0; i < n; i++)
- for (j = 0; j < n; j++)
- C[i][j] = 0.0;
-
- for (kk = 0; kk < en; kk += bsize) {
- for (jj = 0; jj < en; jj += bsize) {
- for (i = 0; i < n; i++) {
- for (j = jj; j < jj + bsize; j++) {
- sum = C[i][j];
- for (k = kk; k < kk + bsize; k++) {
- sum += A[i][k] * B[k][j];
- }
- C[i][j] = sum;
- }
- }
- }
- }
- }

先来谈一下参考资料内bijk函数中的blocking技术吧,和题目的两层嵌套循环不同, bijk函数是五层的嵌套 作为人类似乎很难去理解为啥我就处理个矩阵,要整它五层嵌套,完了它还对性能有好处.

你想象一下transpose函数中如果dim=9999999999999...时,这世界不会存在一个cache能存下这个数组,假设此时cache就只有bsize*bsize(bsize<dim)大小,写完一列bsize个dst后就开始写下一列dst这样只有第一列是不命中的,其他bsize-1列都是命中的.
for (k = kk; k < kk + bsize; k++)bijk函数中 k<kk+bsize就是控制程序写完一个bsize 后就开始写下一列.
这就是blocking技术的核心了.
我们现在开始改transpose函数:
- #include <stdio.h>
-
-
-
- void transpose(int *dst, int *src, int n, int bsize) {
- // n为数组大小(假设是方阵的边长), bsize为块大小, bsize宜接近高速缓存大小
- int i, j, kk, jj;
- // 处理能够完整被块大小分割的部分
- for (kk = 0; kk < n; kk += bsize) { // 注意这里应该使用n而不是en
- for (jj = 0; jj < n; jj += bsize) { // 同上
- for (i = kk; i < kk + (kk + bsize < n ? bsize : n - kk); i++) { // 确保不越界
- for (j = jj; j < jj + (jj + bsize < n ? bsize : n - jj); j++) { // 确保不越界
- // 计算一维数组中的索引
- int src_index = i * n + j;
- int dst_index = j * n + i;
- dst[dst_index] = src[src_index]; // 复制元素
- }
- }
- }
- }
- }
-
- int main() {
- int dim=500;
- int src[dim][dim];
- int dst[dim][dim];
- int i, j;
- //给数组赋值
- for (i = 0; i < dim; i++)
- for (j = 0; j < dim; j++)
- src[i][j] = i+j;
- //转置
- transpose(dst,src,dim,500);
- //检查转置后的结果
- for (i = 0; i < dim; i++)
- for (j = 0; j < dim; j++){
- if(src[i][j]!=dst[j][i])
- printf("转置出错\n");
- }
-
- return 0;
- }
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/757827
推荐阅读
相关标签

