
- 1代码版本管理和提交规范(二)代码提交_软件开发过程中代码提交规范
- 22022年博客之星排行榜 日榜 2023-01-04博客之星 后端排名榜单_个人博客排名
- 3力扣416 分割等和子集 Java版本
- 4C语言完整版笔记(初阶,进阶,深刨,初阶数据结构)_c语言代码速记
- 5保姆级教程:SpringBoot 对接支付宝完成扫码支付,完整流程梳理!_springboot对接支付宝支付
- 6OAuth2.0第三方微信登录_微信auth2.0
- 7【知识图谱】基于neo4j构建医疗领域知识图谱_个人知识体系 neo数据图
- 8PySpark特征工程(I)--数据预处理_pyspark数据预处理
- 9机器学习_深度学习毕设题目汇总——数据分析_数据挖掘_机器学习论文题目
- 10nginx配置密码访问_nginx 配置用户名密码访问
实例分割——Mask R-CNN、YOLOV8、RTMDET、DeepLab四种实例分割算法比对_yolov8和maskrcnn分割算法
赞
踩
1.概述
1.1 语义分割与实例分割
实例分割和语义分割都是计算机视觉领域中图像分割的任务,它们在目标和方法上有一些区别:
语义分割:
- 语义分割的目标是对图像中的每个像素打上类别标签,即识别出图像中每个像素属于哪个预定义的类别(例如,人、汽车、建筑物等)。
- 语义分割不区分同类对象的不同实例,关注的是像素级别的分类,而不是特定实例的识别。
- 语义分割的典型应用包括自动驾驶、医学影像分析、机器人视觉等。
- 语义分割模型通常使用编码器-解码器架构,如FCN、U-Net、DeepLab等,它们能够保留图像的空间分辨率,同时学习到像素级别的分类特征。
实例分割:
- 实例分割不仅需要识别出图像中的对象,还要区分对象的不同实例。这意味着即使是同一类别的对象,实例分割模型也需要能够区分它们,并对每个实例的每个像素进行标记。
- 实例分割是目标检测和语义分割的结合,它要求模型同时输出对象的类别和位置(通过边界框),以及对象的像素级掩码。
- 实例分割在应用上更注重个体的区分,如在拥挤场景下区分不同的人或物体。
- 实例分割的算法包括Mask R-CNN、YOLOv8等,这些算法通常包含目标检测的组件来定位图像中的对象,然后对每个提议的区域进行像素级的分割。
1.2 实例分割任务
两种分割方法的评估指标也有所不同。语义分割常用的评估指标是mIoU(mean Intersection-Over-Union),而实例分割除了使用mIoU评估分割质量外,还需要评估检测的准确性。与目标检测不同,实例分割不仅识别对象的存在,还为每个检测到的对象生成一个像素级别的掩码,这允许更精细的分析和编辑。
实例分割的应用非常广泛,包括但不限于:
- 自动驾驶:识别和区分道路上的行人、车辆、交通标志等。
- 医学成像:在医学图像中分割不同的器官或病变区域。
- 机器人视觉:帮助机器人识别和操作特定的物体。
- 图像编辑:在图像编辑软件中,用户可以轻松地选择和编辑特定的对象。
实例分割的算法通常包括以下几个步骤:
- 候选区域生成:使用区域建议网络(Region Proposal Network, RPN)或其他方法来生成可能包含对象的区域。
- 分类和边界框回归:对这些候选区域进行分类,判断它们是否包含特定的类别,并对边界框进行调整以更准确地定位对象。
- 掩码预测:对于每个已识别的对象,预测一个掩码来区分对象的轮廓。

分割任务:
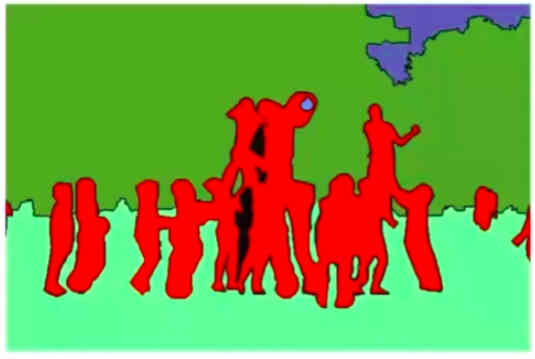
实例分割:
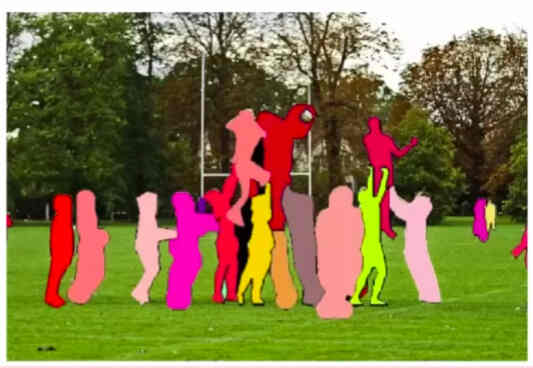
从上面这个例子可以看出,检测任务定位了对象的包围框,语义分割分割出了人这个类别,不过把所有的人一起分割了,实例分割区分出了每个人,并分别进行了分割。实际在做实例分割时,通常同时输出对象的检测框,并给出对象的分割结果。
2. Mask R-CNN
Mask R-CNN是由何凯明等人在2017年提出,用于同时进行目标检测、实例分割和关键点检测。这项工作在计算机视觉领域具有里程碑意义,因为它提供了一个统一的框架来处理这些任务,而不是将它们视为独立的挑战。
Mask R-CNN的核心思想是在已有的Faster R-CNN目标检测框架上增加一个并行的分支来预测对象的掩码,从而实现像素级别的对象分割。这个掩码分支是一个小型的全卷积网络(FCN),它应用于每个感兴趣区域(Region of Interest, RoI),以逐像素的方式预测对象的掩码。
为了解决RoI Pooling中的量化问题,Mask R-CNN引入了RoIAlign层,它通过双线性插值精确地计算输入特征在RoI上的值,而不进行量化,从而更好地保持空间对齐,这对于生成高质量的分割掩码至关重要。
Mask R-CNN的网络架构包括用于特征提取的卷积骨干网络和用于边界框识别和掩码预测的网络头部。它可以与多种架构一起实例化,如ResNet和ResNeXt,以及特征金字塔网络(FPN),后者可以构建一个内部特征金字塔,从而提高检测的准确性和速度。
在训练和推理方面,Mask R-CNN展示了快速的原型制作能力,可以在合理的时间内完成训练,同时保持高准确率。此外,Mask R-CNN还能够扩展到人体姿态估计等其他任务,展示了其灵活性和泛化能力。
Mask R-CNN的代码已经在GitHub上开源,由Facebook AI Research (FAIR) 提供,名为Detectron2,这使得研究人员和开发者可以利用和进一步研究这一算法。
相关论文和代码链接如下:
- 论文: Mask R-CNN
- 代码: Detectron2
这里只讨论RoI Pooling后的Head部分,
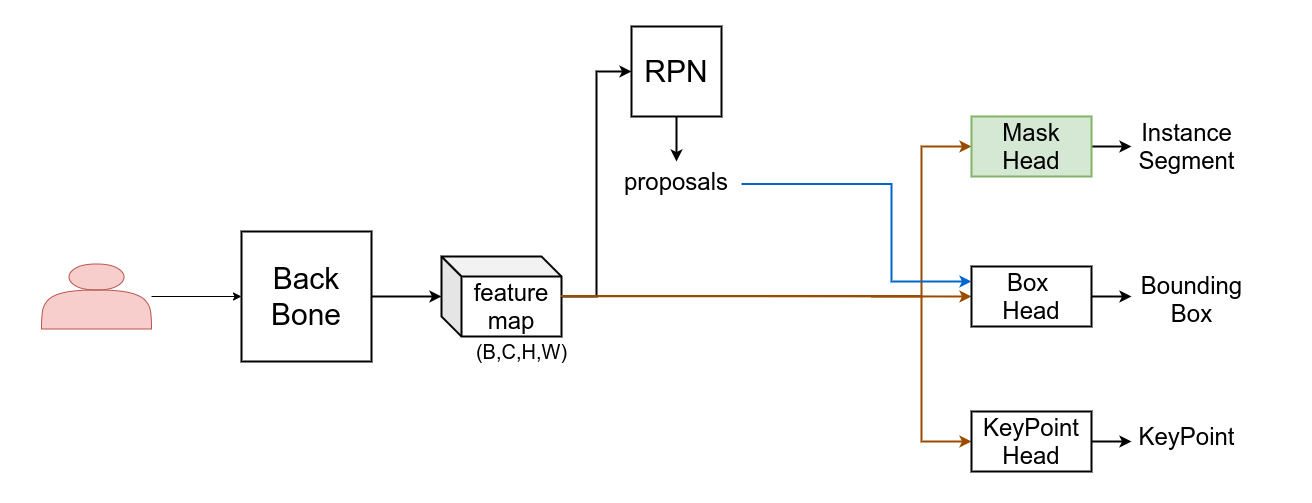
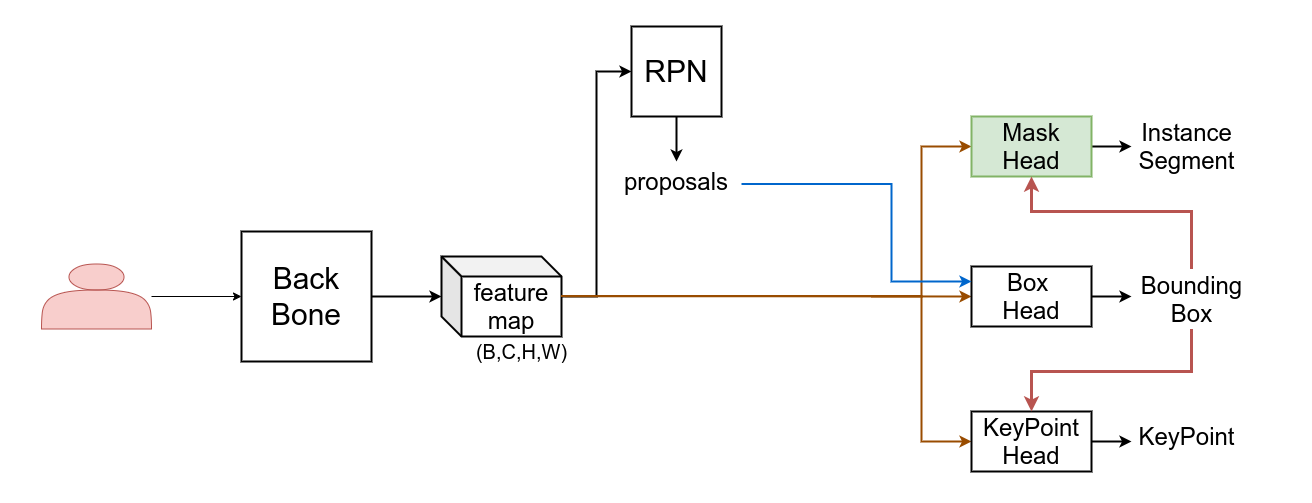
Mask R-CNN同时支持输出检测框,实例分割结果,关键点,这里我们只讨论Mask Head部分,即上图中的右侧绿色分支。
值得注意的是,上图是粗略表示,关于proposal在Head中的使用和Mask/Box/KeyPoint Head之间的关系可以参考下面两个图。
在训练时,Mask/KeyPoint Head都使用proposal框来当作检测box框选对象,如下图蓝色线流所示:
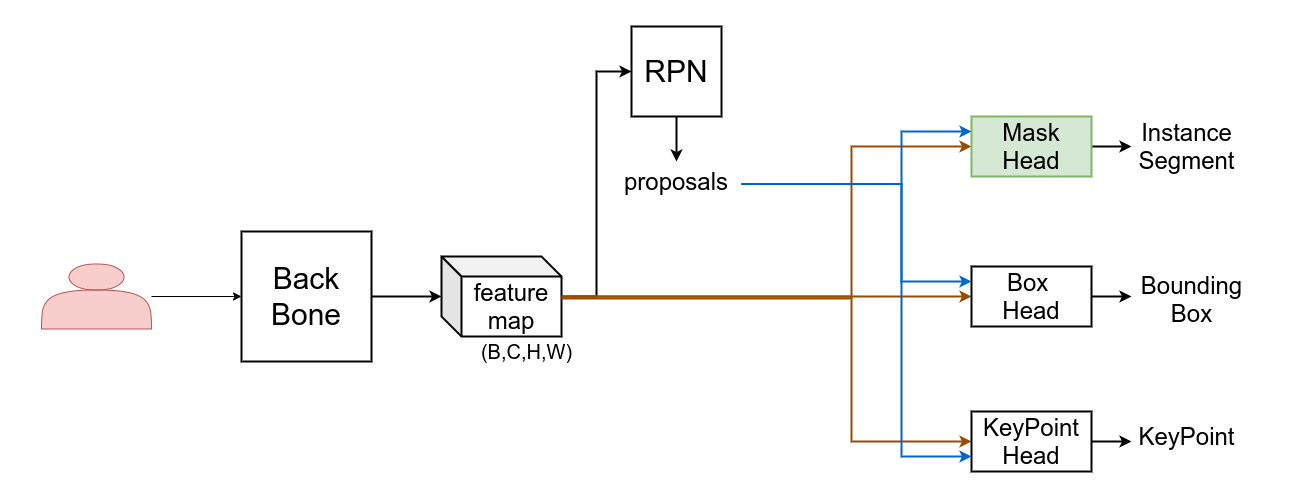
在预测时,Mask/KeyPoint Head不再使用proposals转而使用Box Head预测的检测框来框选对象,因此Mask/KeyPoint Head依赖检测框的输出,如下图紫色线流所示意,
Mask R-CNN的Mask Head分析如下,整理自detectron2代码库:
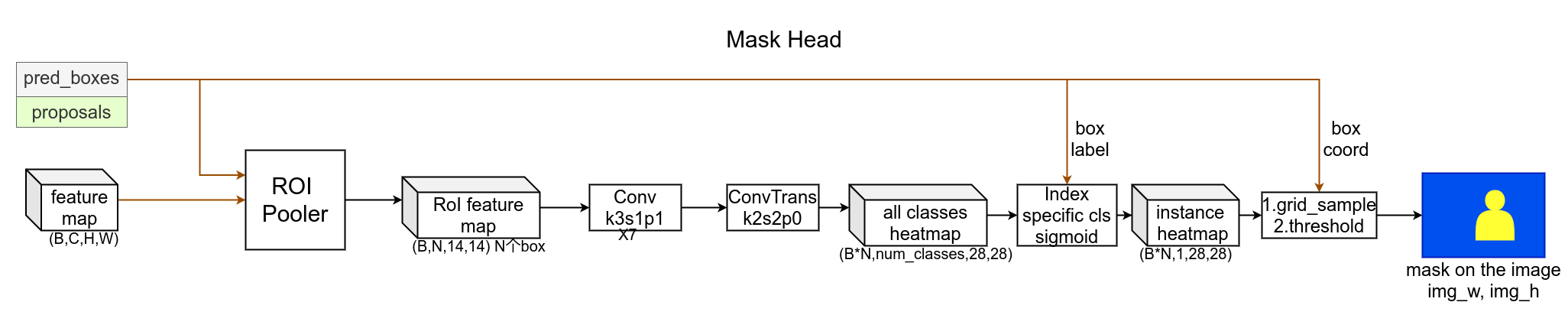
Mask Head的输入有两个,一个是bounding boxes或者proposals(测试推理时使用boxes,训练时使用RPN给出的proposals),另一个是backbone提取的feature map。
Mask Head的结构如上图,先是对feature map根据bounding boxes做ROI Pooling,得到每个ROI的特征图,然后是连续几层常规卷积,最后再跟一层转置卷积进行X2上采样,同时卷积输出通道变成num_class,得到的输出shape=(B*N,num_class, 28, 28),这里28x28就是ROI区域对应的mask,这里对每个对象预测了num_class个mask,在Mask R-CNN中,直接使用Box Head预测的label id来取对应的mask并sigmoid以作为最终当前实例的分割结果。
转置卷积的介绍参考这里转置卷积 (opens new window)。
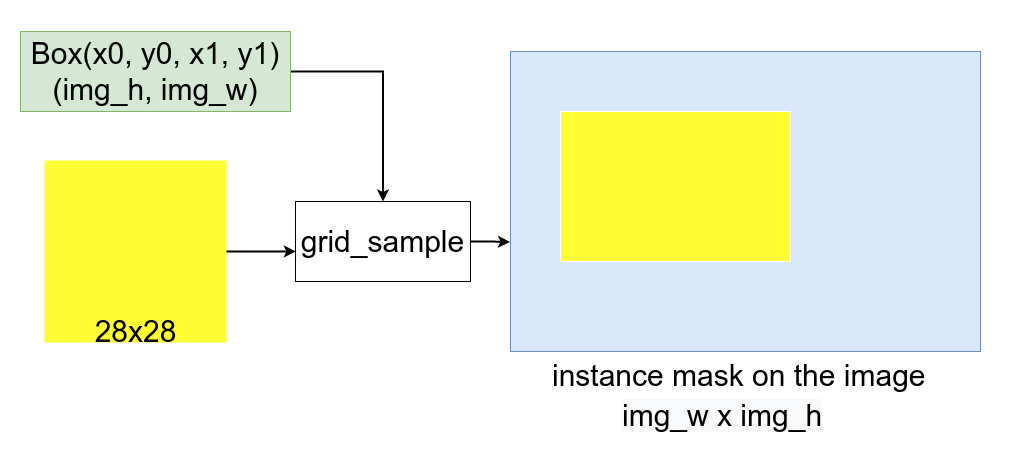
得到28X28的实例ROI分割结果后,要将其变换到原图像上,这里使用了grid_sample方法,使用grid_sample变换,会根据box坐标将ROI Mask变换到原图像box所处的区域。变换后再根据超参数阈值对mask做二值化即可得到最后的分割结果。
2.YOLOV5/8实例分割方法
YOLOV5/8中使用的Instance分割方法和Mask RCNN中区别比较大,
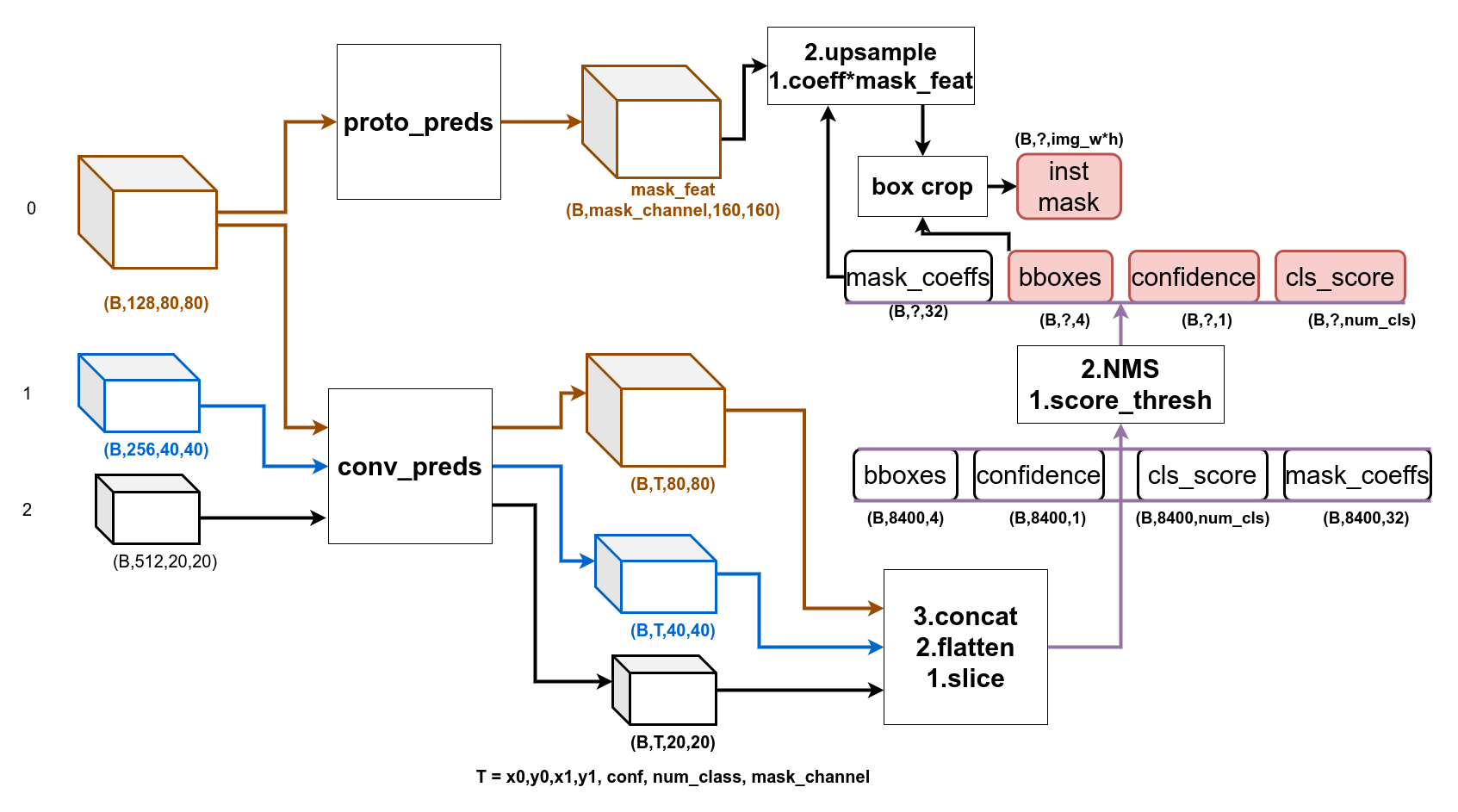
其利用Head1中尺寸最大的特征图作为Mask分支的输入,经过proto_pred卷积层的处理得到shape:(B, mask_channel, H, W)的mask_feature。
检测框的预测分支和目标检测中的YoloV5 Head基本相同,除了对于feature_map的通道上增加了计算每个实例掩码用的参数,参数的数量同proto_pred输出的mask_channel,所以对于80X80/40X40/20X20的feature_map,其通道数为: 4 + 1 + num_classes + mask_channel
拿到解码后的检测框,经过nms处理后得到最后的检测框,取对应的mask_channel个coeffs和mask_feature相乘加权即可得到最后的实例分割结果,完整过程如下图:
3. RTMDet中的实例分割
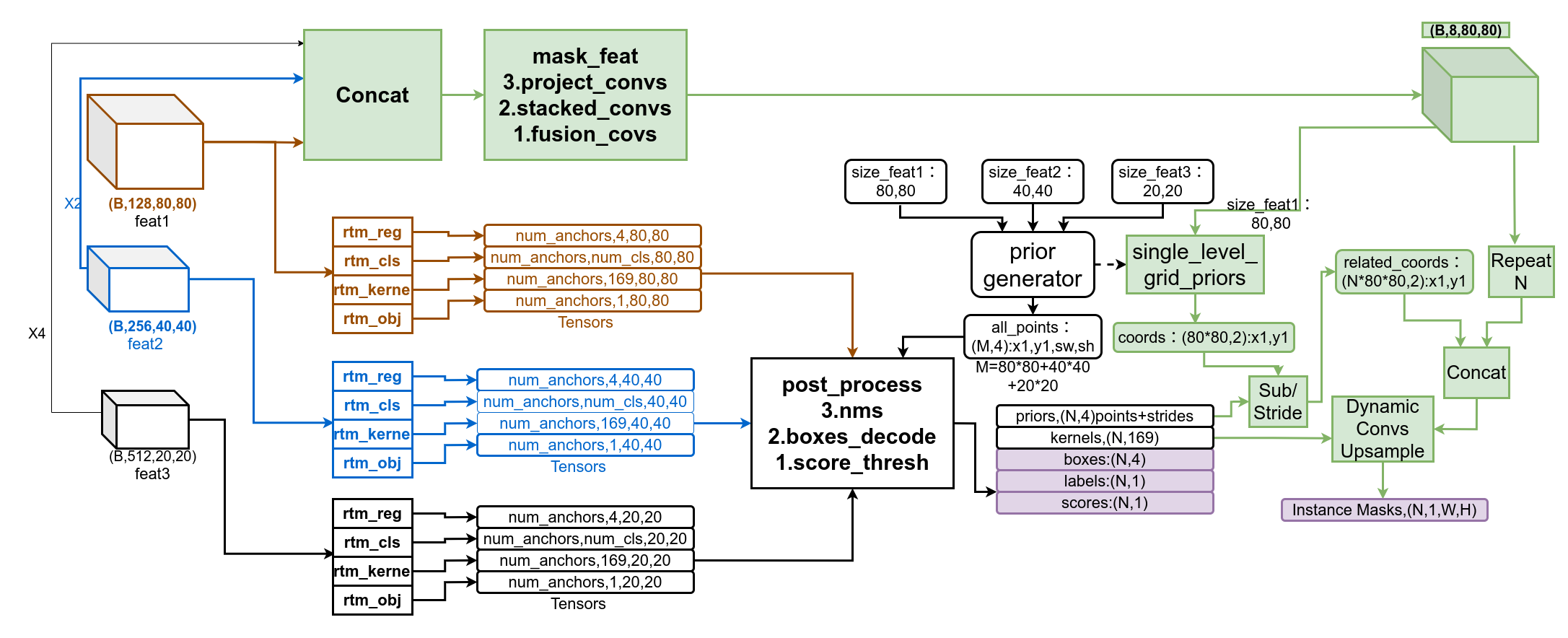
RTMDet中和YOLOV5处理方式很相似,都是对每个检测框实例计算坐标时同时给出预测mask所需的权重参数,区别在与YOLOV5/8中直接用参数和mask_feature进行加权求和,而RTMDET预测了169个参数,构造了3层卷积,来和mask_feature运算得到分割mask。
还有一点RTMDet中mask_feature 并非只使用了80X80的feature map,它还将其余两个头上的特征图上采样后与其进行concatenate,输入mask_feature分支后得到Batch_SizeX8X80X80的mask特征图。特征图并不能直接用来和predicted kernel卷积得到Instance Mask,RTMDet算法使用的mask feat先重复了检测实例的个数次,然后合并了检测框在特征图上的坐标,最后与predicted kernel做卷积的输入mask特征图变成了(N,10,80,80)。
RTMDet实例分割推理的完整过程可参考下图,
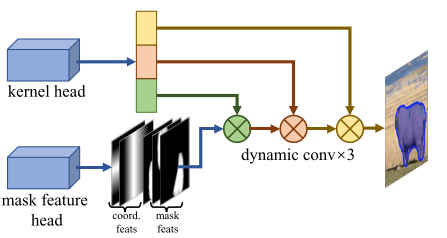
RTMDet根据predicted_kernel升成卷积的方法被称为动态卷积Dynamic Convolution,如下图,
如上,就是Mask R-CNN/YOLOV8/RTMDet三种实例分割的方法,总结来看,YOLOV8/RTMDet方法相似,RTMDet处理mask预测的方法更复杂一些,YOLOV8中的加权求和变成了三层卷积,输入的特征图重复了num_instance次,并合并了mask_feature上对应的priors和num_instance对应点的相对坐标。YOLOV8/RTMDet输出Instance Mask的分辨率比Mask RCNN要大,Mask RCNN经过转置卷积上采样后输出的RoI分割图的大小是28X28,经过GridSample后还原到原分辨率上。不过Mask R-CNN输出的是RoI的分割图,而YOLOV8/RTMDet输出的是在整幅图像上的分割图。
4.DeepLab中的实例分割
DeepLab系列是一系列用于图像分割任务的深度学习模型,它们在处理像素级语义理解方面表现出色。DeepLabv2是DeepLab系列中的一个里程碑,它引入了Atrous Spatial Pyramid Pooling(ASPP)模块,该模块通过多尺度卷积核捕获不同尺度的特征,从而提高分割精度。
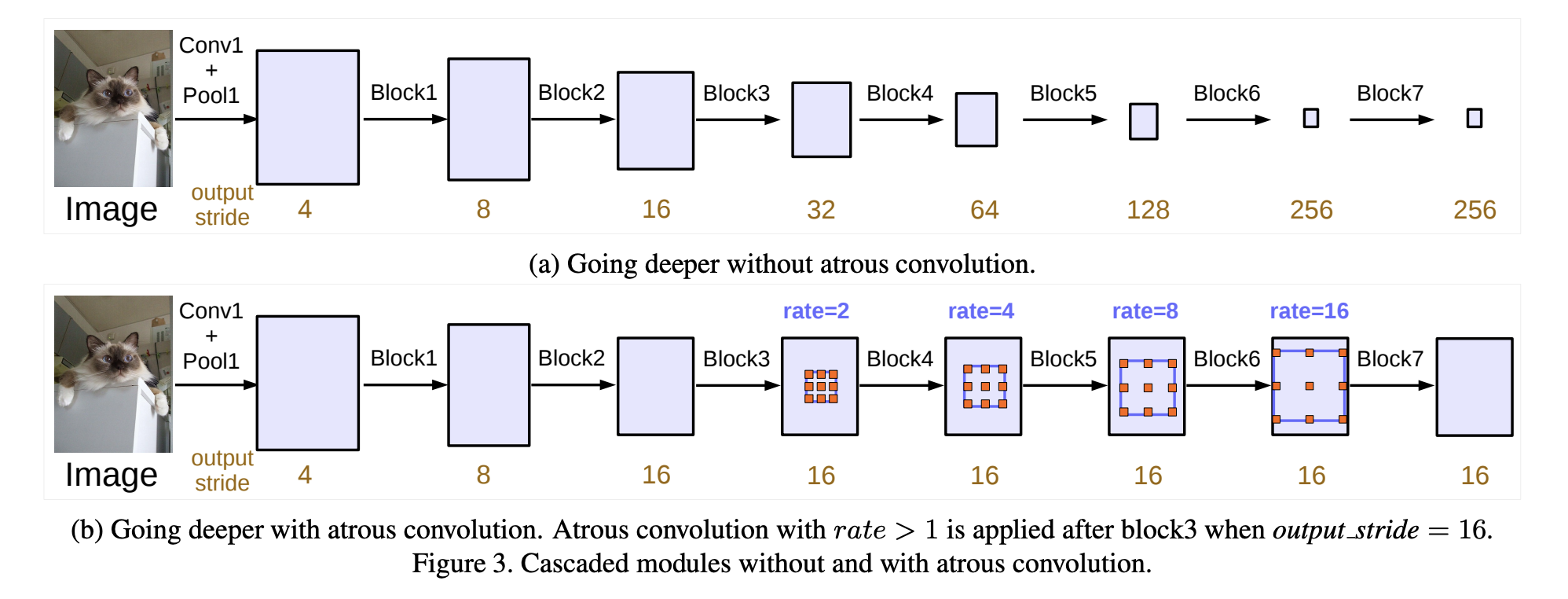
- 多孔卷积(Atrous Convolution):这是一种卷积操作,它允许模型在不增加计算量的情况下捕获更大的感受野。通过调整卷积核的采样率(dilation rate),可以在不同的尺度上提取特征。
- 多尺度上下文:通过使用不同的多孔速率,模型能够同时捕获到局部和全局的上下文信息,这对于理解图像中不同尺寸的物体非常有帮助。
- Atrous Spatial Pyramid Pooling(ASPP)模块:这是DeepLabv2中的一个核心组件,它通过不同尺度的卷积核捕获多尺度的特征,并将这些特征融合以提高分割的准确性。
- 全局平均池化(Global Average Pooling, GAP):在ASPP模块中,作者使用了全局平均池化来生成图像级别的特征。这些特征包含了整个图像的全局信息。
- 1×1卷积:在全局平均池化之后,使用1×1卷积来进一步提取特征,这通常用于降维或增加模型的非线性表达能力。
- 双线性上采样(Bilinear Upsampling):这是一种上采样技术,用于将特征图从低分辨率映射到高分辨率,以匹配原始输入图像的尺寸。
- 改进的ASPP:在DeepLabv3+中,ASPP模块得到了进一步的改进,包括使用更多的卷积核和不同的多孔速率来捕获更丰富的上下文信息。
改进的ASPP中,模型使用了三个不同尺度的3×3卷积核,这些卷积核具有不同的多孔速率(6, 12, 18),以及一个1×1卷积核,它们都具有256个滤波器和批量归一化层。这样的设计允许模型在不同的尺度上捕获和融合特征,从而提高分割性能。

