
热门标签
热门文章
- 1BUUCTF做题Upload-Labs记录pass-01~pass-10_buuctf uploads-labs
- 2揭秘Kimi+:官方智能体提示词泄露_kimi 提示词泄露
- 3【论文笔记】Digital Twin in Industry: State-of-the-Art——Tao Fei
- 4IPC之 - C#中用Socket 实现进程间通信_c# ipc通讯
- 5Anaconda基本教程及常用命令(介绍、安装、基本操作、管理环境、管理包、conda和pip以及借助pqi换源)_anacondar的有关命令
- 6计算机网络网络层之层次化路由_层次化算力路由
- 7基于Hadoop与Spark大数据平台的个性化图书推荐系统搭建学习总结_基于spark的图书推荐系统实验报告
- 8dify-on-wechat中涉及企业微信几个函数解析_dify集成企业微信
- 9OpenSSL补丁安装(二)_openssl补丁怎么打
- 10【版本控制-TortoiseSVN】_svn删除分支
当前位置: article > 正文
【OpenMV小车——第1.1篇】行进系统的设计_来福轮控制
作者:Guff_9hys | 2024-07-14 17:18:43
赞
踩
来福轮控制
行进系统:由轮子、减速电机、电机驱动器、底板组成,具有在一定平面上移动的能力。
轮子的类型:
- 普通轮: 运动简单,控制简单。移动方向和轮子方向一样。
- 履带型: 适合不平坦地面
- 麦克纳姆轮: 转向灵活,控制困难。
- 来福轮: 转向灵活,控制较为简单。
- 支撑轮: 无动力,万向轮

结构形式:
- 双普通轮加一支撑轮
只需要两个减速电机,小车的转向、进退由电机的速度、正反转控制,控制简单,常用于循迹小车、避障小车等。

- 双普通轮加俩支撑轮
常搭配圆形底盘,可避障。对称分布,使得转向比一个支撑轮的简单。

- 四普通轮
控制走直线简单平稳,但转向比较困难。

- 履带式
适合不平坦的运行面,结构比较复杂。

- 四麦克纳姆轮
控制好的话非常灵活,左右平移,顺逆旋转,前进后退像跳舞。
对此安装方式的控制方法:
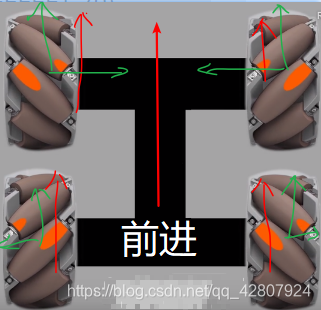
前进:四轮前转,如红线所示,前后两对轮的对向力和背向力(如绿线)相互抵消,只有前进的力。后退同理。(轮子与地面有摩擦力,此文中提到的力为摩擦力反作用力)
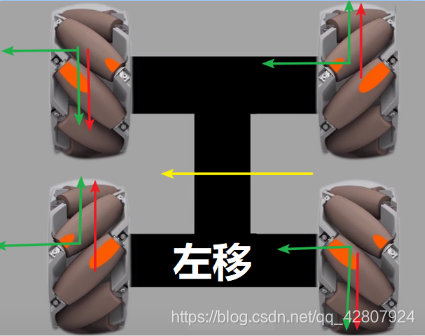
左移:左侧轮向里转,右侧轮向外转,如红线所示。左右两侧轮的前进力和后退力(如绿线)相互抵消,只有左移的力。右移同理。
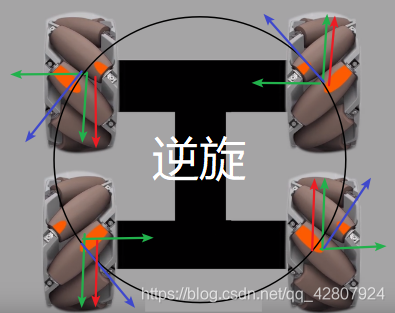
旋转:
左侧轮往后,右轮往前转,即可合成逆时针的切向力(如紫色),使得小车逆时针旋转。右旋同理,即左轮往前,右轮往后转。
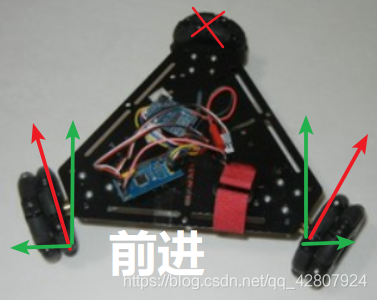
- 三来福轮
控制好的话非常灵活,顺逆旋转,前进后退像跳舞。

进退:一轮不动,两轮正反转,双侧力抵消,只剩前进或后退的力。
旋转:三轮转向一致即可顺逆旋转。

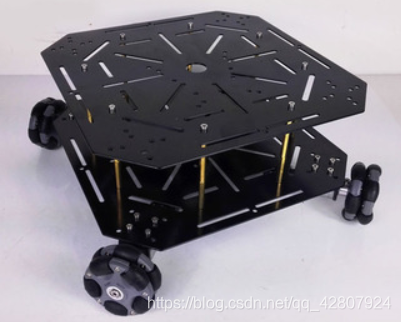
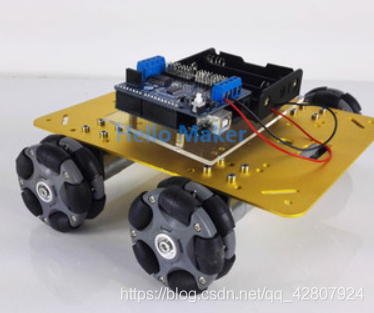
- 四来福轮
控制好的话非常灵活,左右平移,顺逆旋转,前进后退像跳舞。其控制也简单灵活,与上述相似,读者可自行斟酌。
结语:
行进系统是很重要的系统,其结构形式决定控制方式,而结构形式取决于功能,所以需要根据功能来选择合适的最佳的结构。
此篇收录于专栏【手把手教你做OpenMV小车】,总篇链接:https://blog.csdn.net/qq_42807924/article/details/86585757
(本文为吾本虚无原创,禁止任何形式转载)
全文完。
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

