
热门标签
热门文章
- 1Microsoft Office Word导出高清PDF步骤
- 2人工智能在信息系统安全中的运用(1),网络安全实战项目视频_人工智能在信息安全中的实现方式有哪些
- 3解决iTerm中‘zsh-syntax-highlighting‘找不到的问题_plugin 'zsh-syntax-highlighting' not found
- 4NetworkManager的前世今生
- 5Npm常用命令有哪些_npm run dev之前有过命令是?
- 6快速解决浏览器访问http或者不安全https 地址栏出现不安全或者Not secure_chrome not secure
- 7如何连接python和neo4j
- 8十大经典排序算法(全面总结+Java代码实现)_for(int j = 1; j < r; ++j)
- 9基于Python网易云音乐评论数据爬取+清洗+分析可视化 计算机毕业设计(附源码)✅_爬取网易云音乐热评
- 10从零开始学习大模型-第一章-大模型是什么_大模型如何学习
当前位置: article > 正文
YOLOV5-Lite轻量化部署与训练_yolov5lite
作者:Gausst松鼠会 | 2024-06-16 05:22:59
赞
踩
yolov5lite
前言
没啥意思,很简单,需要实现一个目标检测,但是,不能占用太多运算资源,同时需要保证一定的精度。并且要在移动端部署,要在一台ROS小车上面部署。那么此时常见的选择自然有yolov3-tiny等。但是考虑到onnx部署方案的成熟,目前的加持之下,python也有不错的效率,所以,这里就考虑使用到yolov5-lite版本。
可以看到官方的对比:
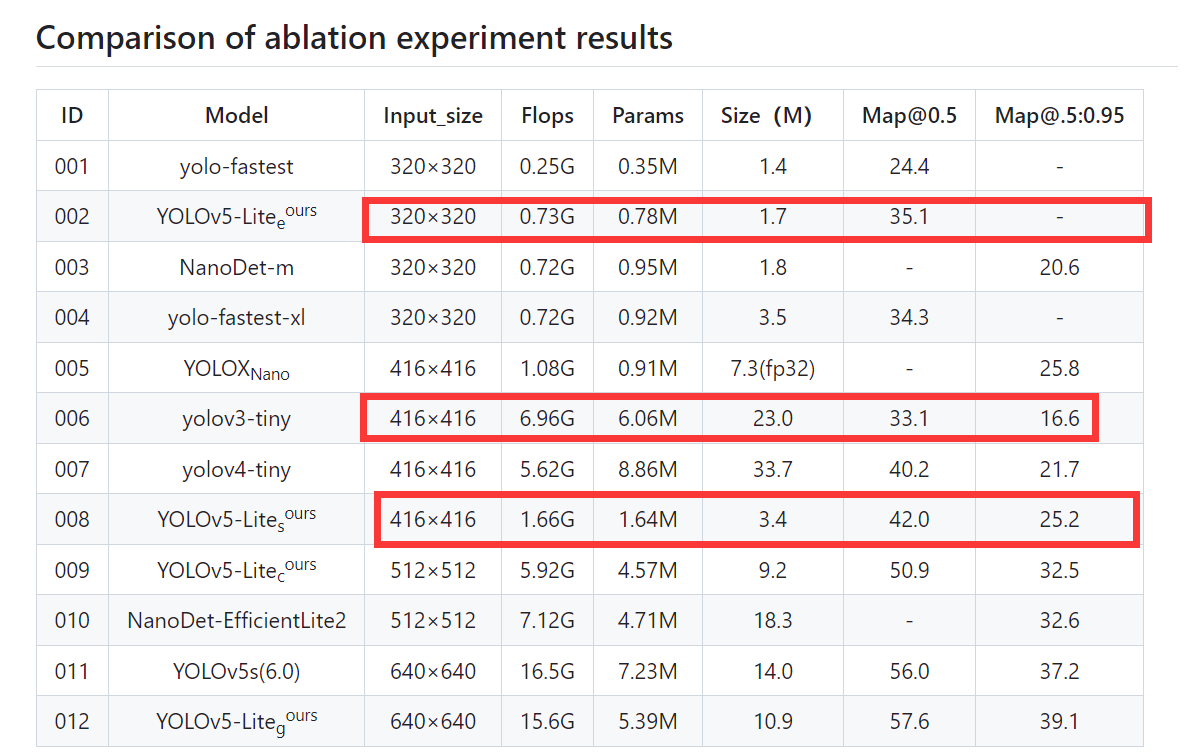
同时在我的本地机器上面也是做了对比。
在使用yolov3-tiny 使用opencv dnn部署的情况下,帧率只有30多,但是使用yolov5-Lite普遍100+。这就意味着,可以在边缘设备进行快部署。同时得益于onnx,俺们也可以很方便地进行部署。
此外的话,由于这玩意是基于yolov5做的,所以在训练的时候,和V5保持高度的一致,包括里面数据增强的方法等等,况且人家精度也比yolov3-tiny高。 在科大讯飞智能小车上实测,极限压缩一下分辨率可以达到80FPS左右,原始模型也可以达到30FPS。这里就很方便后期在整合其他的算法,例如+sort算法做一个目标跟踪。这个部分的话,我后续可能会做到。
项目下载
ok,那么首先第一步的话,还是说去下载项目即可,我们分为两个部分,一个是如何运行项目,一个是如何训练自己的数据集。这个是比较重要的,后面我们还需要定制化的需求。如何整合之类的是吧,
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/725314
推荐阅读
相关标签

