
- 1水果销量展示(Listview、SimpleAdapter)_安卓水果展示代码
- 2java实现猜数字游戏_java猜数字游戏while循环
- 3嵌入式物联网系统的调试与性能优化技巧(附例子)
- 4如何查看自己的公网ip_公网ip查询
- 5【linux】linux服务器判断域名、IP、端口、URL是否有效_linux测试地址是否能访问
- 6注意力机制在CNN中使用总结_注意力机制加在cnn的什么位置
- 7vue hover事件
- 8【从零单排Golang】第十四话:使用rate和ratelimit实现限流限速_uber/ratelimit 使用demo
- 9canvas2image.js将canvas保存为图片(将HTML5画布Canvas的内容保存为本地图片并下载)
- 10CSS 简约动态加载中动画
td宽度自适应_一文详解基于深度强化学习的无人车自适应路径规划方法
赞
踩

来源 | 知乎
知圈 | 进“高精度地图社群”,请加微信15221054164,备注地图

导读:本文选自知乎,作者详细介绍了基于深度强化学习(Deep Reinforcement Learning, DRL)的无人车自适应路径规划方法,并在无障碍环境、静态障碍环境、动态障碍环境下都取得了不错的效果。
目录
1. 前言
2. 主要研究内容
3. D3QN PER算法
----3.1 DQN算法
----3.2 Double DQN算法
----3.3 Dueling DQN算法
----3.4 优先经验回放
4. 环境特征融合方案
----4.1 自身状态信息处理方法
----4.2 激光雷达点云信息处理方法 ----4.3 视觉图像信息处理方法----4.4 环境特征融合方案
5. 实验环境
----5.1 仿真实验环境的搭建 ----5.2 小车的动作空间划分 ----5.3 算法参数设置 ----5.4 奖励函数的设置6. 效果展示
----6.1 无障碍环境
----6.2 静态障碍环境
----6.3 5个静态障碍+5个动态障碍环境
----6.4 10个动态障碍环境
7. 完整代码
----7.1 Software
----7.2 Installation
--------7.2.1 解决pointgrey_camera_driver编译不过的问题

前言
初衷是,在环境不是完全已知的情况下,希望行星车具备一定的自适应能力,应对环境发生的变化。所以,基于深度强化学习(Deep Reinforcement Learning, DRL)理论提出了端到端的路径规划方法,直接从传感器信息映射出动作指令再发布给行星车。同时采用不同的神经网络结构分别处理不同的传感器信息,最后将环境特征融合在一起,构成基于D3QN PER的多传感器行星车路径规划方法。

主要研究内容
主要研究内容如图: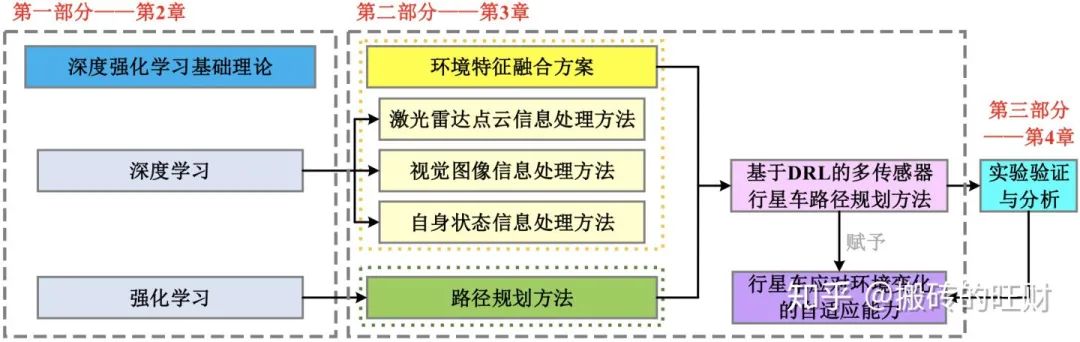
技术途径:
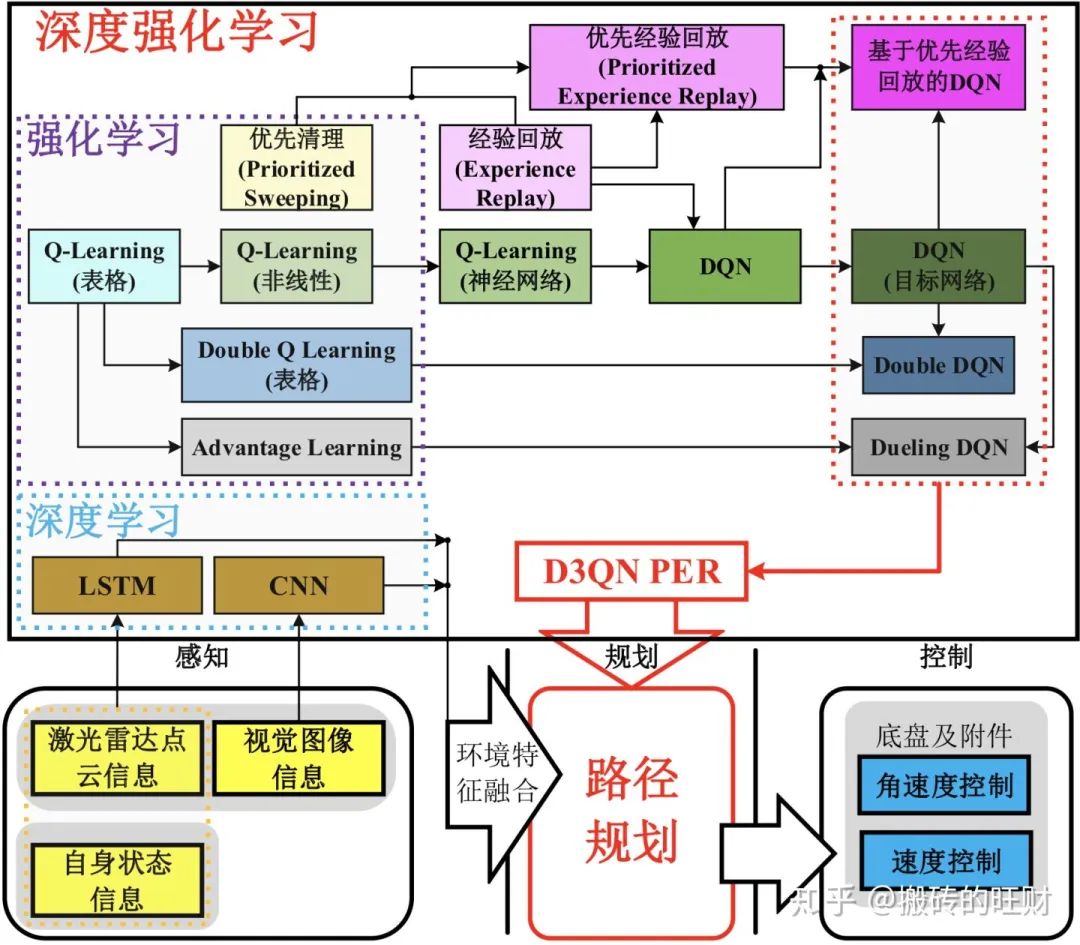

3.1 DQN算法搬砖的旺财:David Silver 增强学习——笔记合集(持续更新)
https://zhuanlan.zhihu.com/p/50478310
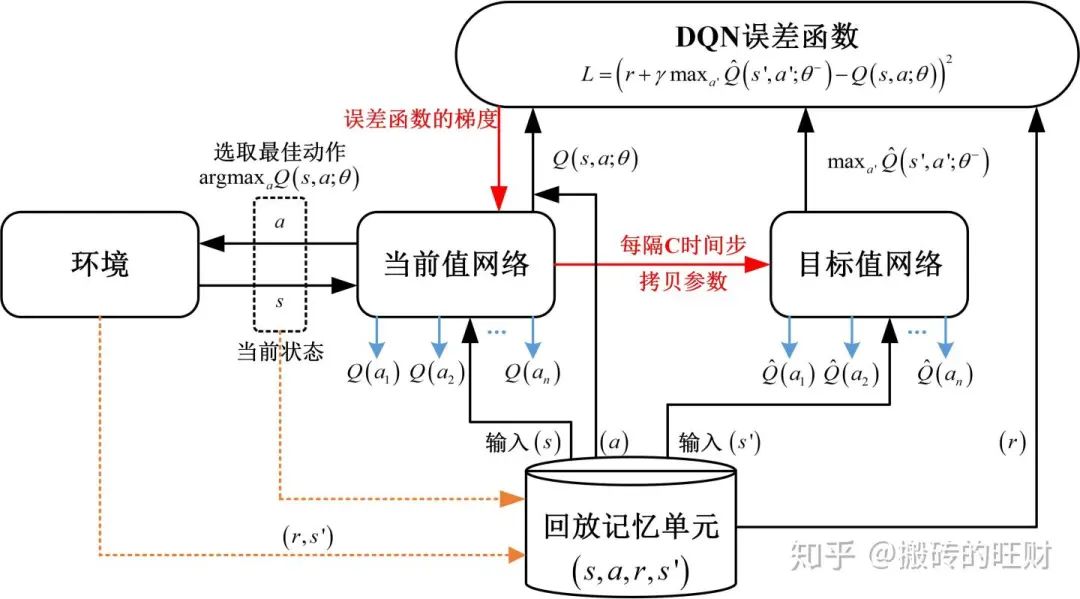
 其中,
其中,
 是目标Q网络,参数为
是目标Q网络,参数为
 ,负责生成训练过程中的目标,即目标Q值
,负责生成训练过程中的目标,即目标Q值
 ;
;
 是当前Q网络,参数为
是当前Q网络,参数为
 ;值得注意的是,
和
的网络结构完全一致。
每训练C步,将当前Q网络的参数完全复制给目标Q网络,那么,接下来C步参数更新的目标将由更新后的目标Q网络负责提供。
具体的实施步骤请参见上图~
3.2 Double DQN算法
;值得注意的是,
和
的网络结构完全一致。
每训练C步,将当前Q网络的参数完全复制给目标Q网络,那么,接下来C步参数更新的目标将由更新后的目标Q网络负责提供。
具体的实施步骤请参见上图~
3.2 Double DQN算法
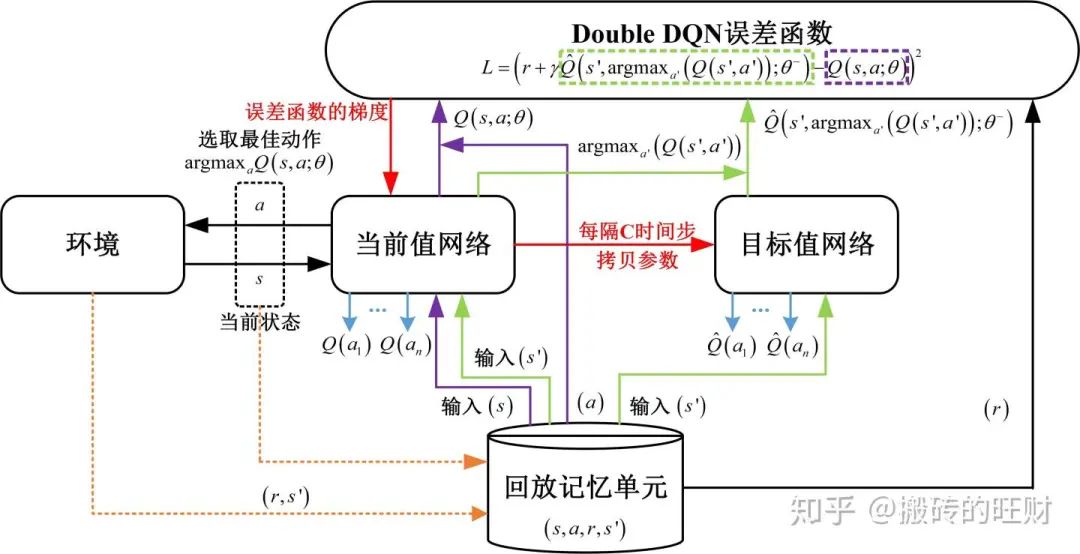
 当前Q网络负责选择动作,而带有“延迟效应”的目标Q网络用来计目标Q值,具体的实施步骤请参见上图
当前Q网络负责选择动作,而带有“延迟效应”的目标Q网络用来计目标Q值,具体的实施步骤请参见上图
3.3 Dueling DQN算法
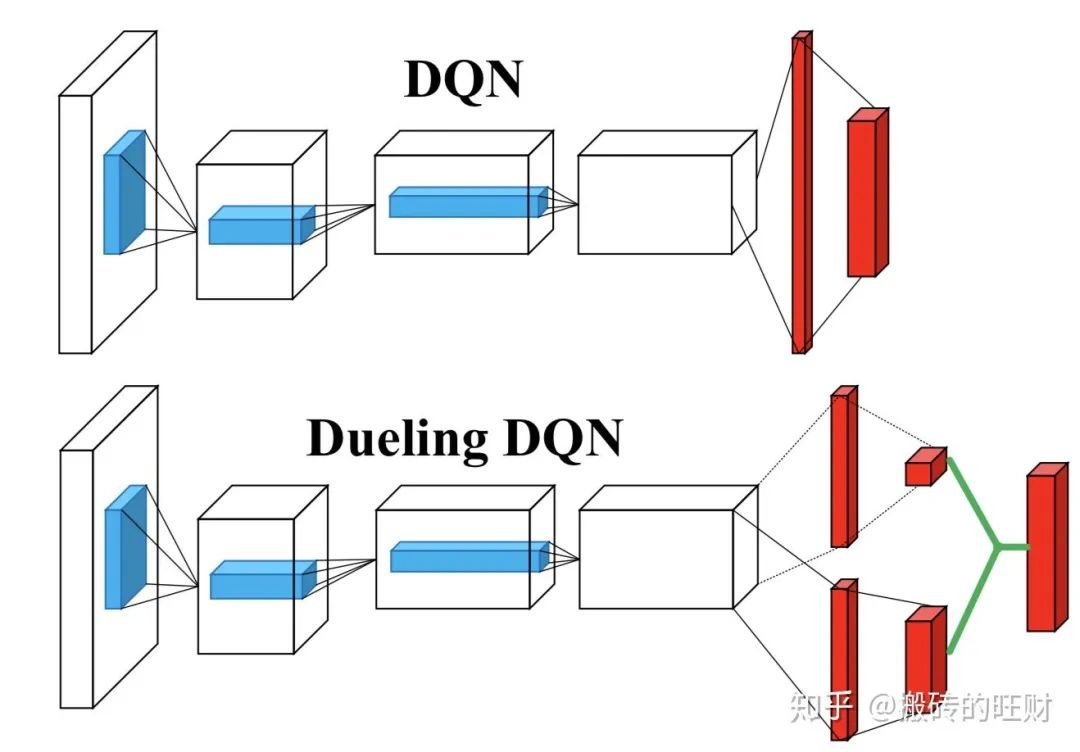
Dueling DQN相比于DQN在网络结构上做出了改进,在得到中间特征后“兵分两路”,一路预测状态值函数,另一路预测相对优势函数,两个相加才是最终的动作值函数。
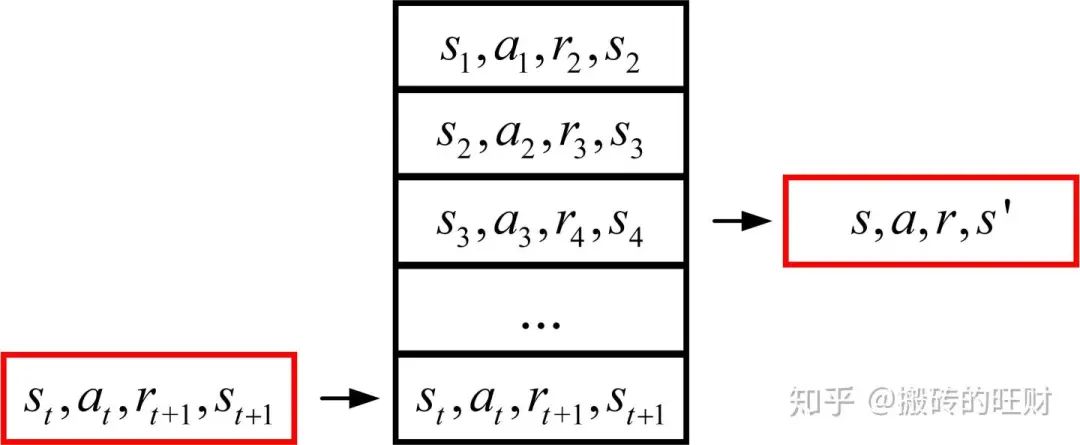
3.4 优先经验回放 在DQN中使用经验回放的动机是:作为有监督学习模型,深度神经网络要求数据满足独立同分布假设;但样本来源于连续帧,这与简单的RL问题相比样本的关联性增大了不少。假如没有经验回放,算法在连续一段时间内基本朝着同一个方向做梯度下降,那么在同样的步长下这样直接计算梯度就有可能不收敛。所以经验回放的主要作用是: 克服经验数据的相关性,减少参数更新的方差;克服非平稳分布问题。 经验回放的做法是从以往的状态转移(经验)中随机采样进行训练,如下图所示,这样操作使得数据利用率高,可以理解为同一个样本被多次使用。
 的概率为:
的概率为:
 其中,
其中,
 是第
个经验的优先级;指数
是第
个经验的优先级;指数
 决定使用优先级的多少,当
决定使用优先级的多少,当
 时是均匀随机采样的情况。
具体的,采用成比例的优先(Proportional prioritization),即
时是均匀随机采样的情况。
具体的,采用成比例的优先(Proportional prioritization),即
 其中,
其中,
 为 TD-error;
为 TD-error;
 是为了防止经验的TD-error为0后不再被回放。在实现时采用二叉树(Sum tree)结构,它的每个叶子节点保存了经验的优先级,父节点存储了叶子节点值的和。这样,头节点的值就是所有叶子结点的总和。采样一个大小为
是为了防止经验的TD-error为0后不再被回放。在实现时采用二叉树(Sum tree)结构,它的每个叶子节点保存了经验的优先级,父节点存储了叶子节点值的和。这样,头节点的值就是所有叶子结点的总和。采样一个大小为
 的minibatch时,范围
的minibatch时,范围
 被均分为
个小范围,每个小范围均匀采样,这样,各种经验都有可能被采样到。
为了消除由采样带来的偏差,加入重要性采样(Importance-sampling)。重要性采样权重为
被均分为
个小范围,每个小范围均匀采样,这样,各种经验都有可能被采样到。
为了消除由采样带来的偏差,加入重要性采样(Importance-sampling)。重要性采样权重为
 。其中,
。其中,
 用于调节偏差程度,因为在学习的初始阶段有偏差是无所谓的,但在后期就要消除偏差。为了归一化重要性采样权重,使
用于调节偏差程度,因为在学习的初始阶段有偏差是无所谓的,但在后期就要消除偏差。为了归一化重要性采样权重,使
 。
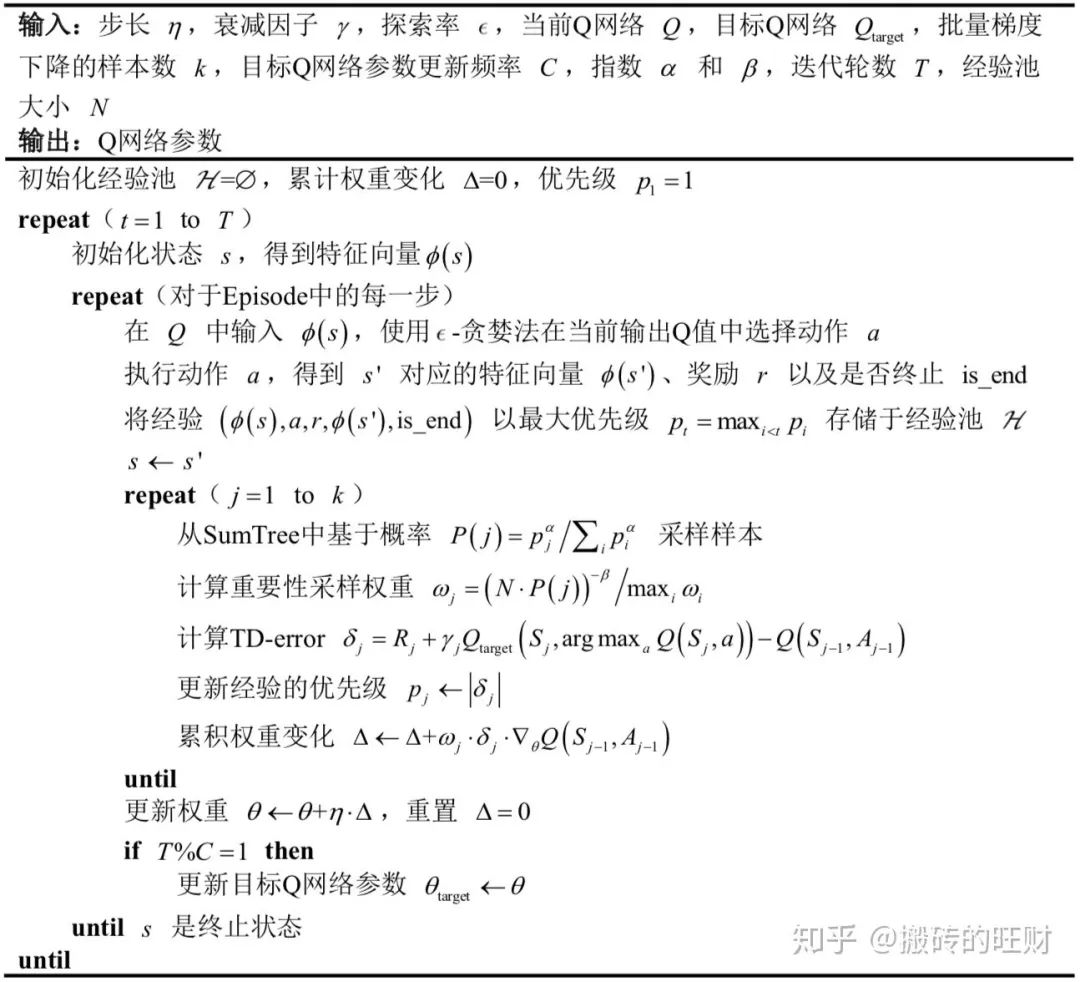
来看一下PER和Double DQN结合后的伪代码:
。
来看一下PER和Double DQN结合后的伪代码:

环境特征融合方案
4.1 自身状态信息处理方法
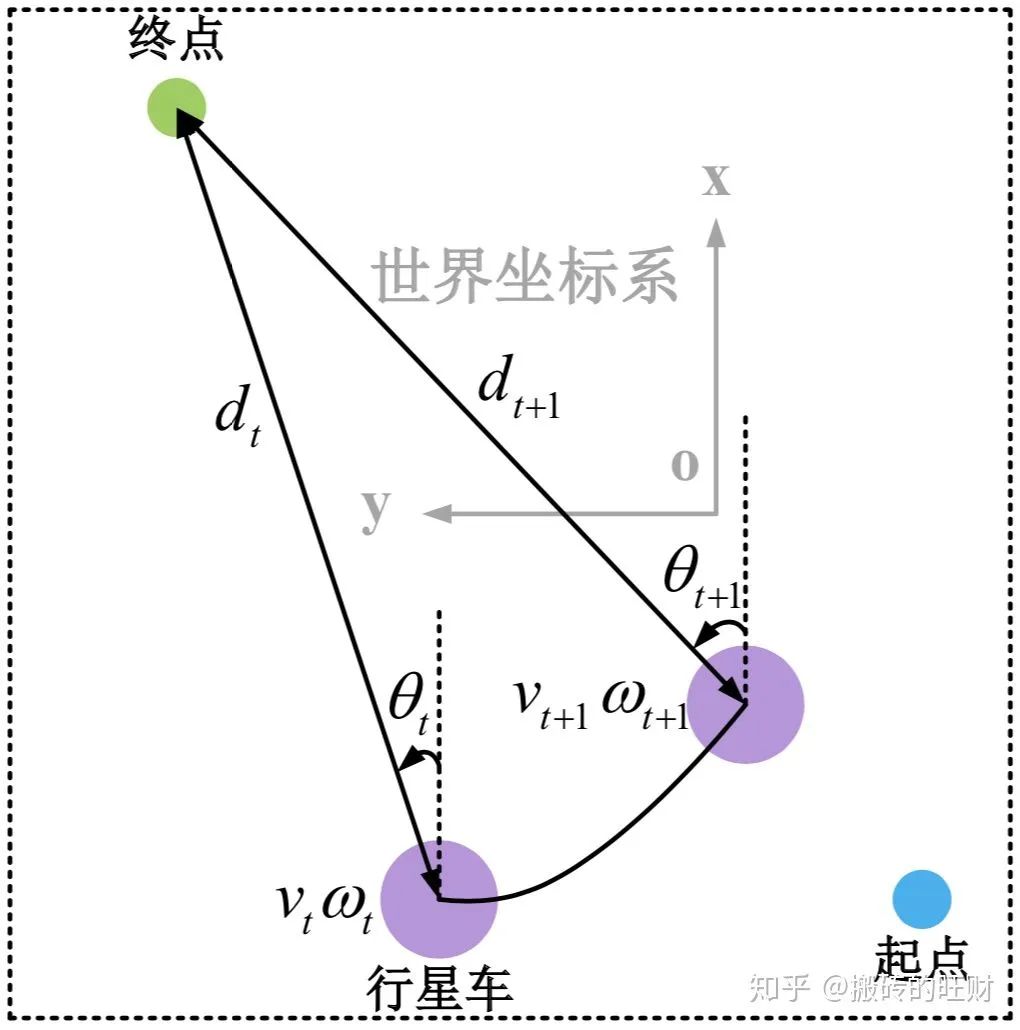
 ,其中,
,其中,
 和
和
 为
为
 时刻小车的速度和角速度信息,
时刻小车的速度和角速度信息,
 和
和
 为
时刻小车相对终点的距离和角度信息。自身状态信息时刻指引着小车向终点移动。
4.2 激光雷达点云信息处理方法
为
时刻小车相对终点的距离和角度信息。自身状态信息时刻指引着小车向终点移动。
4.2 激光雷达点云信息处理方法
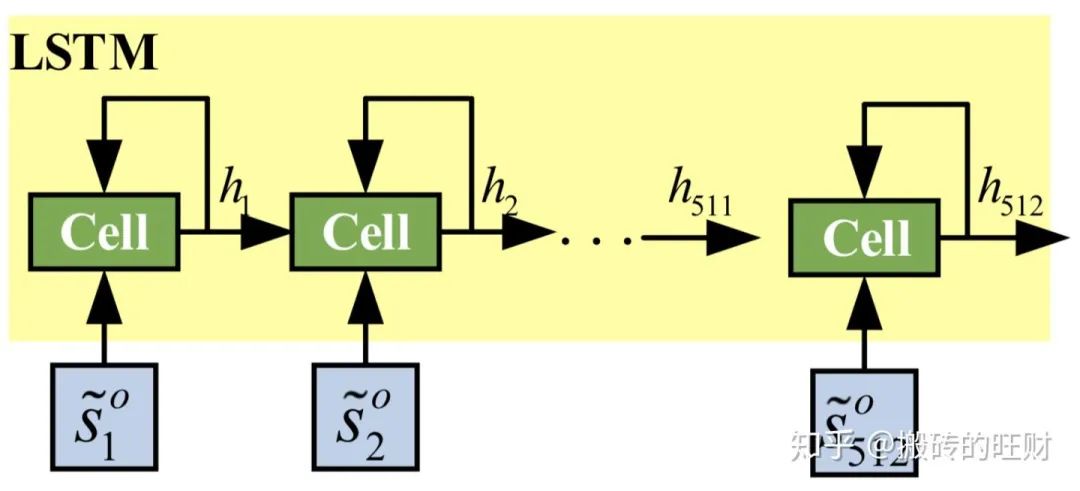
LIDAR产生的点云属于长序列信息,比较难直接拆分成一个个独立的样本来通过CNN进行训练。所以采用LSTM网络来处理LIDAR点云信息,其中cell单元为512个,具体的网络结构如下图所示:
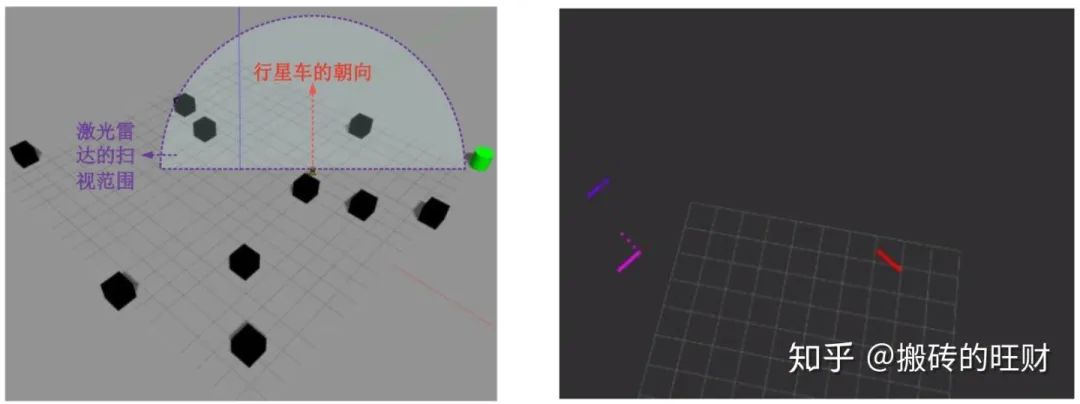
 ,探测距离为
,探测距离为
 ,单位是米,如下图所示:
,单位是米,如下图所示:
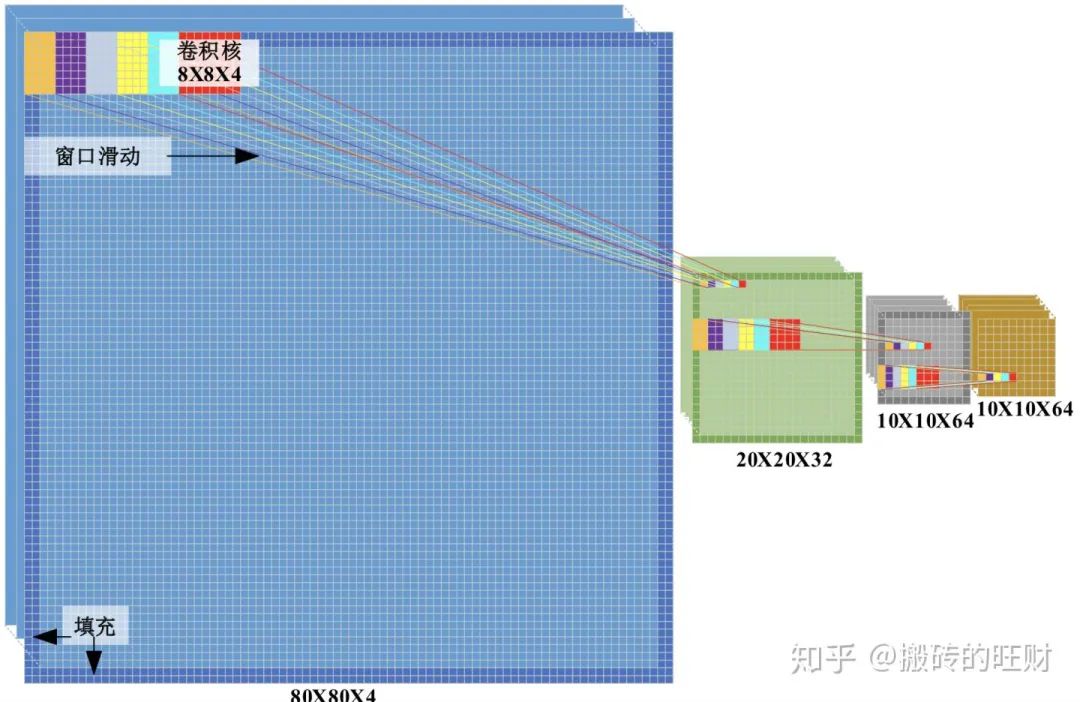
4.3 视觉图像信息处理方法
尽管LIDAR擅长测量障碍物的距离和形状,但它实际上并不能用于确定障碍物的类型。计算机视觉可通过分类来完成这项任务, 即给定相机的图像,可以标记图像中的对象。
本文采用CNN处视觉图像信息。输入图像  经过预处理和叠帧(4 帧)后变为
经过预处理和叠帧(4 帧)后变为  的单通道灰色图。
的单通道灰色图。

原始图像和经过预处理后的图像
这里共采用了三个卷积层,它们分别是 conv1、conv2 和 conv3,具体参数如下:




环境实验
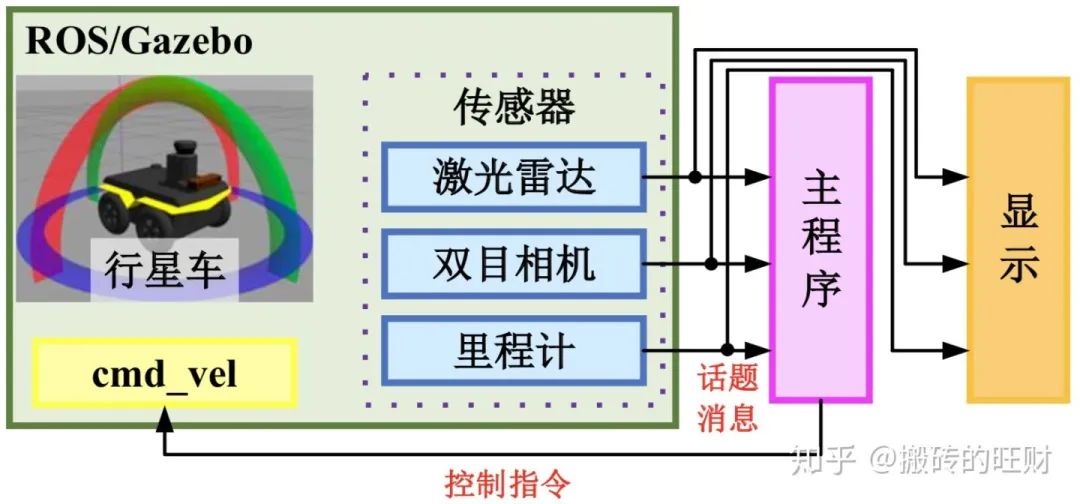
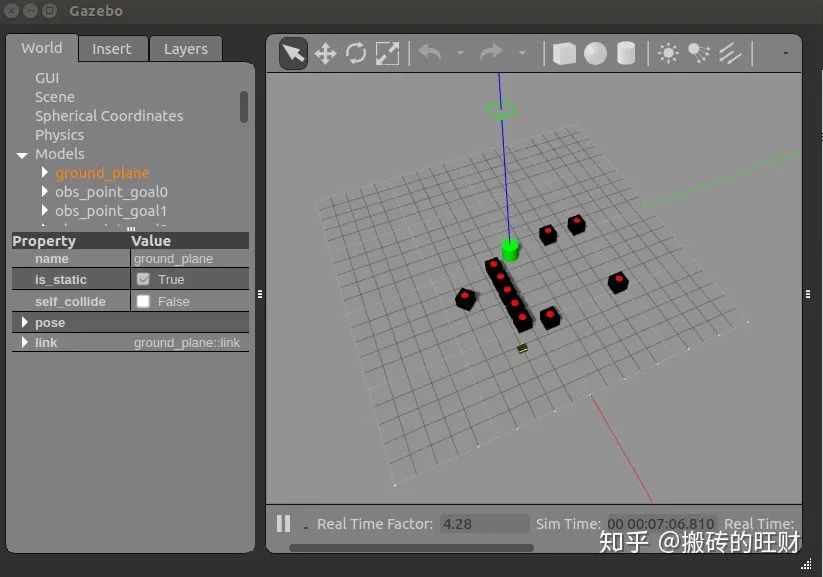
5.1 仿真实验环境的搭建
基于ROS及Gazebo搭建的仿真实验环境的框架如图所示:
关于如何使Gazebo的仿真速度加快 10 倍,请参考:
搬砖的旺财:将Gazebo的仿真速度加快10倍!!!
https://zhuanlan.zhihu.com/p/59702590
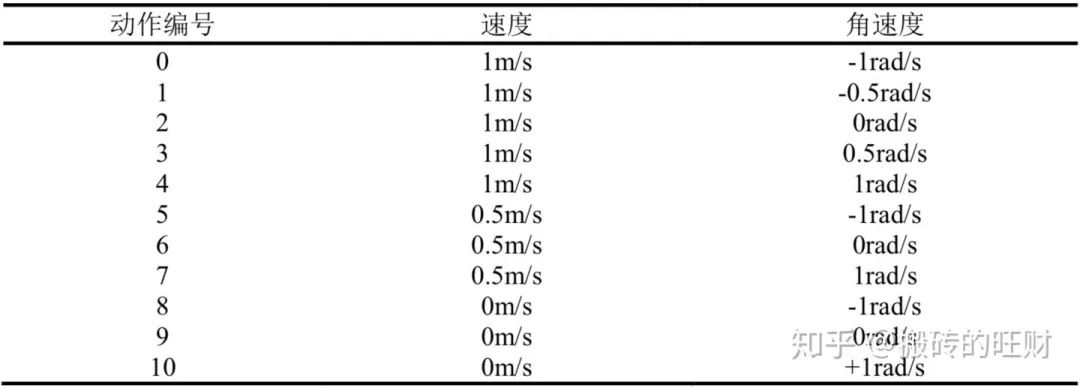
5.2 小车的动作空间划分
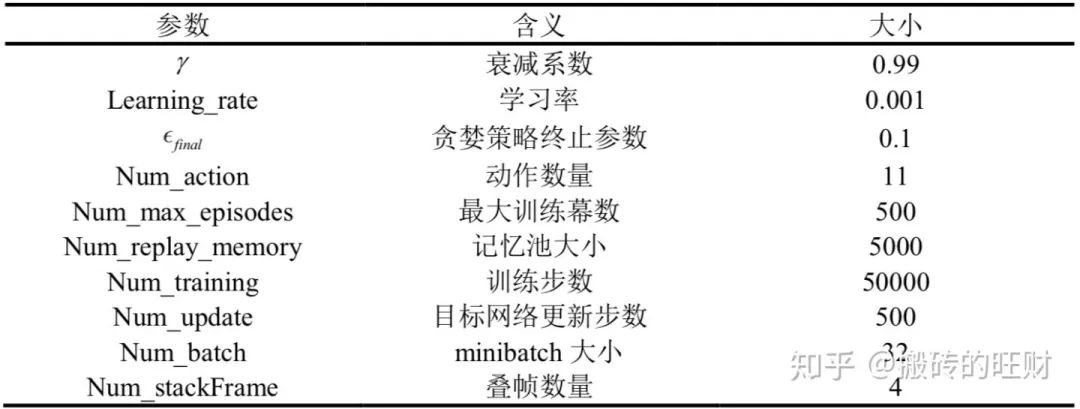
 -贪婪法的参数从初始值1.0开始按照训练步数线性下降
-贪婪法的参数从初始值1.0开始按照训练步数线性下降  。
。
很有意思的一件事情,经过测试发现,记忆池的大小和训练步数保持10倍的关系是最好的~

参数按照训练步数线性下降:  。
。
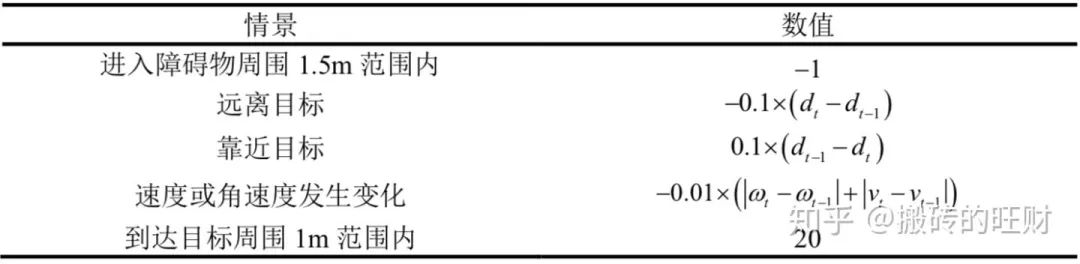
5.4 奖励函数的设置

效果展示
6.1 无障碍环境
6.2 静态障碍环境
6.3 5个静态障碍+5个动态障碍环境
6.4 10个动态障碍环境
视频1:
https://v.qq.com/x/page/g3104n5ortq.html
视频2:
https://v.qq.com/x/page/q3104y6cdjz.html
完整代码
请点击:CoderWangcai/DRL_Path_Planning
https://github.com/CoderWangcai/DRL_Path_Planning
1、Software
Ubuntu 16.04
ROS Kinect
Python 2.7.12
Tensorflow 1.12.0
git clone github.com/CoderWangcai
(PS:这一步请耐心等待,训练好的model比较大~)
cd DRL_Path_Planningcatkin_make
source devel/setup.bash roslaunch-multi_jackal_tutorials ten_jackal_laser_add_apriltag.launch 出现的便是下面的场景:
self.load_path = '.../jackal/src/tf_pkg/scripts/saved_networks/10_D3QN_PER_image_add_sensor_obstacle_world_30m_2_2019_06_02' (PS:如果需要运行其他python文件,也请将其中的路径补充完整~) 另起一个终端: python D3QN_PER_image_add_sensor_dynamic_10obstacle_world_30m_test.py 搞定啦,出现的便是训练好的10个动态障碍环境~ 3、解决pointgrey_camera_driver编译不过的问题 catkin_make可能会遇到关于pointgrey_camera_driver的问题 解决方法如下: cd src/
git clone github.com/ros-drivers/cd ..
catkin_make 编译到上面这里的时候卡住了,没关系,ctrl+c,然后把刚刚Download的pointgrey_camera_driver文件夹删除,因为现在已经生成相关的消息了,它不起作用了。
catkin_make
没问题啦,整个文件夹都编译过了~如有问题请提issue~
说明:文章观点仅供分享交流,不代表焉知自动驾驶的立场,转载请注明出处,如涉及版权等问题,请您告知(小老虎13636581676微信同),我们将及时沟通处理。本文已获权,转载请联系作者


