
- 1OpenWRT搭建个人web站点并结合内网穿透实现公网远程访问_openwrt搭建个人网站
- 2假设检验_零假设是我们的模型被正确指定,我们有强有力的证据来拒绝这个假设。因此,我们有充
- 3canvas绘制圆形进度条_小程序圆形进度条怎么做
- 4View转换为Bitmap_view转为bitmap
- 5新年王炸!OpenAI深夜放出Sora模型,AI视频行业大变天,人人视频剪辑的时代,来了!...
- 6【Oracle】玩转Oracle数据库(六):模式对象管理与安全管理
- 7什么是代码审计?代码审计的方法与技巧有哪些?
- 8统计学⑤——假设验证
- 9从底层结构开始学习FPGA(4)----MUX多路选择器(Multiplexer)
- 10Mac OS 10.14 低版本如何安装Xcode 11.6 高版本教程_monetery安装xcode10.2.1
基于RK3568的Linux开发_rk356x_linux_sdk
赞
踩
第一篇 RK3568 Linux系统移植
前言
本文主要介绍了如何编译官方的RK356X_Linux_SDK包。针对自制的RK3568板卡对Linux系统进行移植和裁剪。
一、编译环境搭建
1.编译环境介绍
操作系统:Ubuntn18.04
内存:4GB及其以上
2.安装依赖
在安装依赖之前,对操作系统进行更新
sudo apt update
安装依赖
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool \
expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support \
qemu-user-static live-build bison flex fakeroot cmake \
unzip device-tree-compiler python-pip ncurses-dev python-pyelftools
确保所有依赖安装成功后,才能进行下一步
二、获取官方的RK356X_Linux_SDK包
1.解压RK356X_Linux_SDK压缩包
将下载好的RK356X_LINUX_20220831文件放到/home/user目录下,如图所示:

进入RK356X_LINUX_20220831目录:
user@ubuntu18:~$ cd RK356X_LINUX_20220831/
解压RK356X_Linux_SDK压缩包
user@ubuntu18:~/RK356X_LINUX_20220831$ sudo cat x* | tar xz
解压后的文件如图所示:

进入SDK包根目录
user@ubuntu18:~/RK356X_LINUX_20220831$ cd RK356X_LINUX_SDK_V1.3.0_20220620/RK356X_LINUX_SDK_V1.3.0_20220620/
2.目录结构
SDK包根目录下的文件夹参考如下:

三、编译linux系统固件
注意:以下操作均在SDK包的根目录下进行
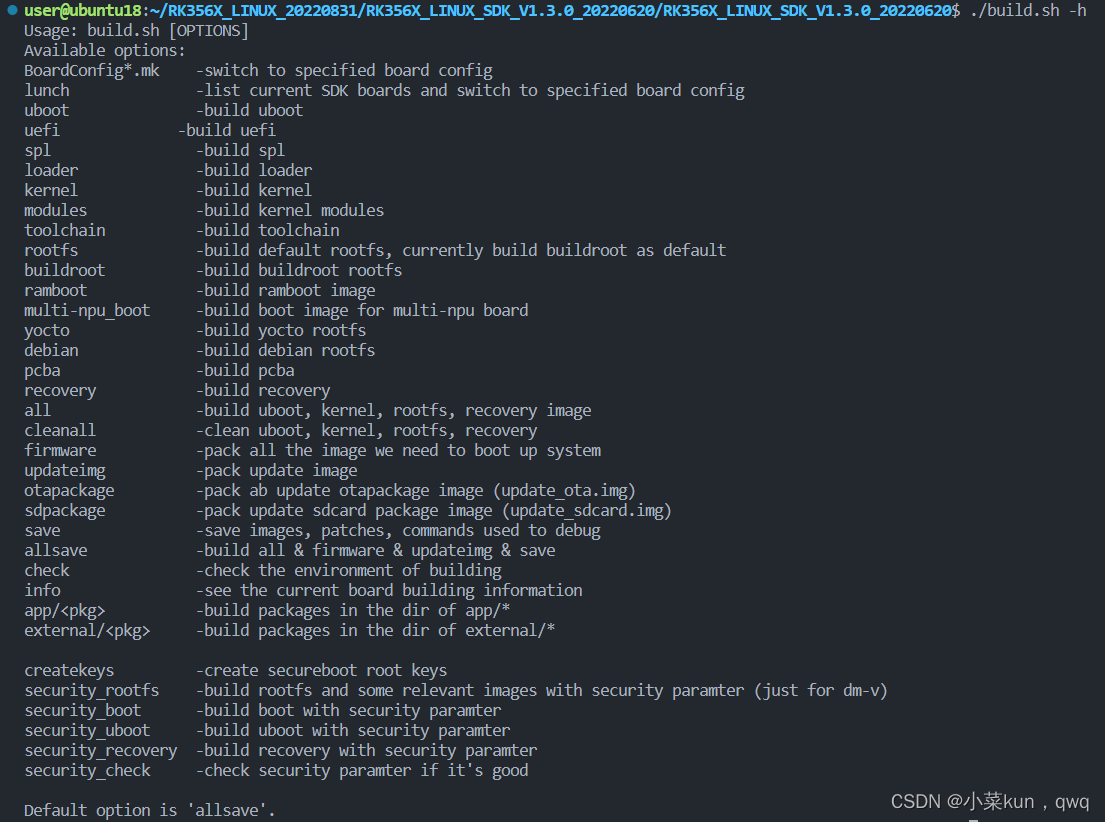
瑞芯微为我们提供了一个很方便的编译脚本build.sh.可进行分步编译和一键编译。
查看编译脚本的帮助信息
./build.sh -h
1 选择合适的板级配置文件
查看系统默认的板级配置文件
./build.sh lunch

选择板级配置文件
根据自己板子芯片和内存的选型,选择和板子适配的板级配置文件
方便后期进行系统移植和定制化
例如:我们使用的芯片为RK3568,内存为DDR4,因此选择第5个配置文件
2.编译Linux系统
由于我们是第一次进行编译,选择全自动编译,确保SDK包可以使用
./build.sh all
在编译kernel的过程中,系统会弹出电源域的图形化界面,所以需要对设备树中的电源域配置进行再次确认,找到对应的设备树文件,与之一一对应即可。
电源域的图形化界面如图所示:

电源域配置所在的设备树文件为rk3568-evb.dtsi 该文件位为SDK包根目录下/kernel/arch/arm64/boot/dts/rockchip/目录下
设备树中的电源域默认配置如下:
- &pmu_io_domains {
- status = "okay";
- pmuio2-supply = <&vcc3v3_pmu>;
- vccio1-supply = <&vccio_acodec>;
- vccio3-supply = <&vccio_sd>;
- vccio4-supply = <&vcc_3v3>;
- vccio5-supply = <&vcc_3v3>;
- vccio6-supply = <&vcc_3v3>;
- vccio7-supply = <&vcc_3v3>;
- };
3.打包固件
执行以下命令,生成的镜像将会被打包到rockdev 目录下
./mkfirmware.sh

执行以下命令,在rockdev 目录下生成update.img
./build.sh updateimg

四、系统移植和定制化
1.板级配置文件定制化
1)新建默认配置文件
RK3568的默认配置文件存放在SDK工程kernel/arch/arm64/configs/目录下
在当前目录下,新建一个名为wheel_linux_defconfig的默认配置文件(可根据自己要求进行命名)
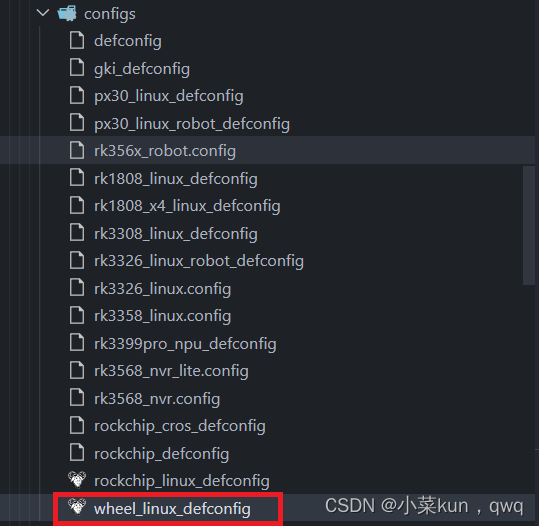
将rockchip_linux_defconfig文件中的内容复制到wheel_linux_defconfig,在板级配置文件会将默认的配置文件更改为新建的配置文件
在进行驱动开发时,我们可以通过内核的图形化界面和直接更改默认配置文件的方式,选择驱动是编译进内核还是编译成模块,亦或者是不编译。使用自己的默认配置文件可以实现驱动的定制化。
2)新建设备树文件
RK3568的设备树文件存放在SDK工程kernel/arch/arm64/boot/dts/rockchip/目录下
在当前目录下,新建一个名为rk3568-wheel-lpddr4.dts的设备树文件(一般命名格式为:芯片名称-厂商名称-内存类型.dts)

将rk3568-evb1-ddr4-v10-linux.dts文件中的内容复制到rk3568-wheel-lpddr4.dts
内容如下
- // SPDX-License-Identifier: (GPL-2.0+ OR MIT)
- /*
- * Copyright (c) 2020 Rockchip Electronics Co., Ltd.
- *
- */
- #include "rk3568-evb1-ddr4-v10.dtsi"
- #include "rk3568-linux.dtsi"
- #include <dt-bindings/display/rockchip_vop.h>
使用自己的设备树文件,可以根据自己的需求对内核的功能进行定制化。对于需要修改的设备节点,只需要在自己的设备树文件当中修改即可。这样既可以保证原始设备树的完整性,又与其他不同厂商制作板卡的设备树文件相互独立,互不干扰。
3)新建板级配置文件
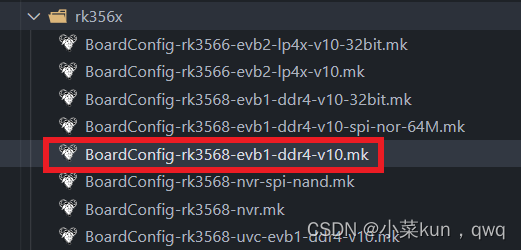
RK3568的板级配置文件存放在SDK工程device/rockchip/rk356x目录下
默认的板级配置文件为
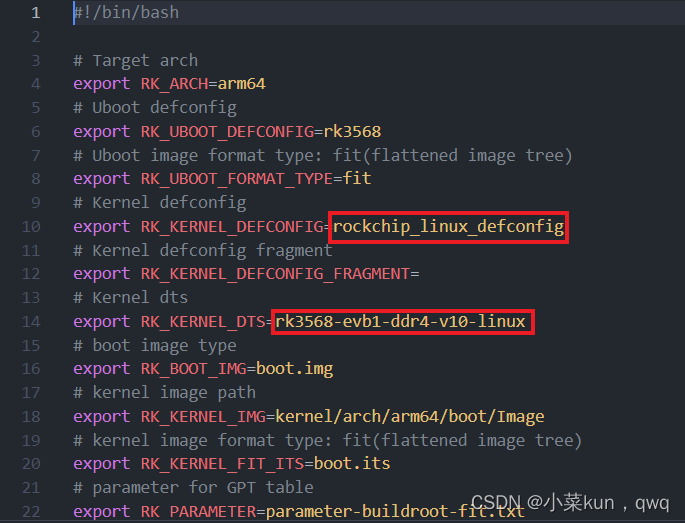
其中我们主要需要关注的内容如下:
新建一个BoardConfig-rk3568-wheel-lpddr4.mk板级配置文件
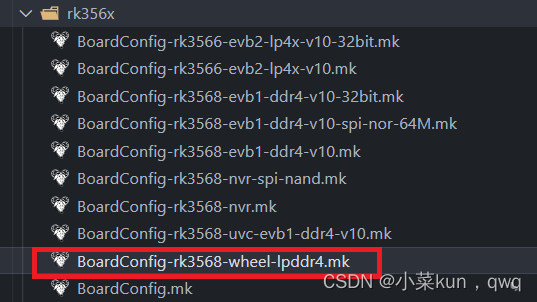
复制BoardConfig-rk3568-evb1-ddr4-v10.mk文件的内容到BoardConfig-rk3568-wheel-lpddr4.mk板级配置文件当中,并对其进行修改
修改后的内容如下

到此,通过修改自己的板级配置文件,简单现了Linux内核的定制化,接下来,便是针对自己的板卡,对内核进行裁剪和移植。
2.修改电源域
在SDK工程/kernel/arch/arm64/boot/dts/rockchip/目录下的rk3568-wheel-lpddr4.dts设备树文件中进行电源域的修改
电源域默认配置如下:
- &pmu_io_domains {
- status = "okay";
- pmuio2-supply = <&vcc3v3_pmu>;
- vccio1-supply = <&vccio_acodec>;
- vccio3-supply = <&vccio_sd>;
- vccio4-supply = <&vcc_3v3>;
- vccio5-supply = <&vcc_3v3>;
- vccio6-supply = <&vcc_3v3>;
- vccio7-supply = <&vcc_3v3>;
- };
根据自制板卡的原理图,对电源域进行配置
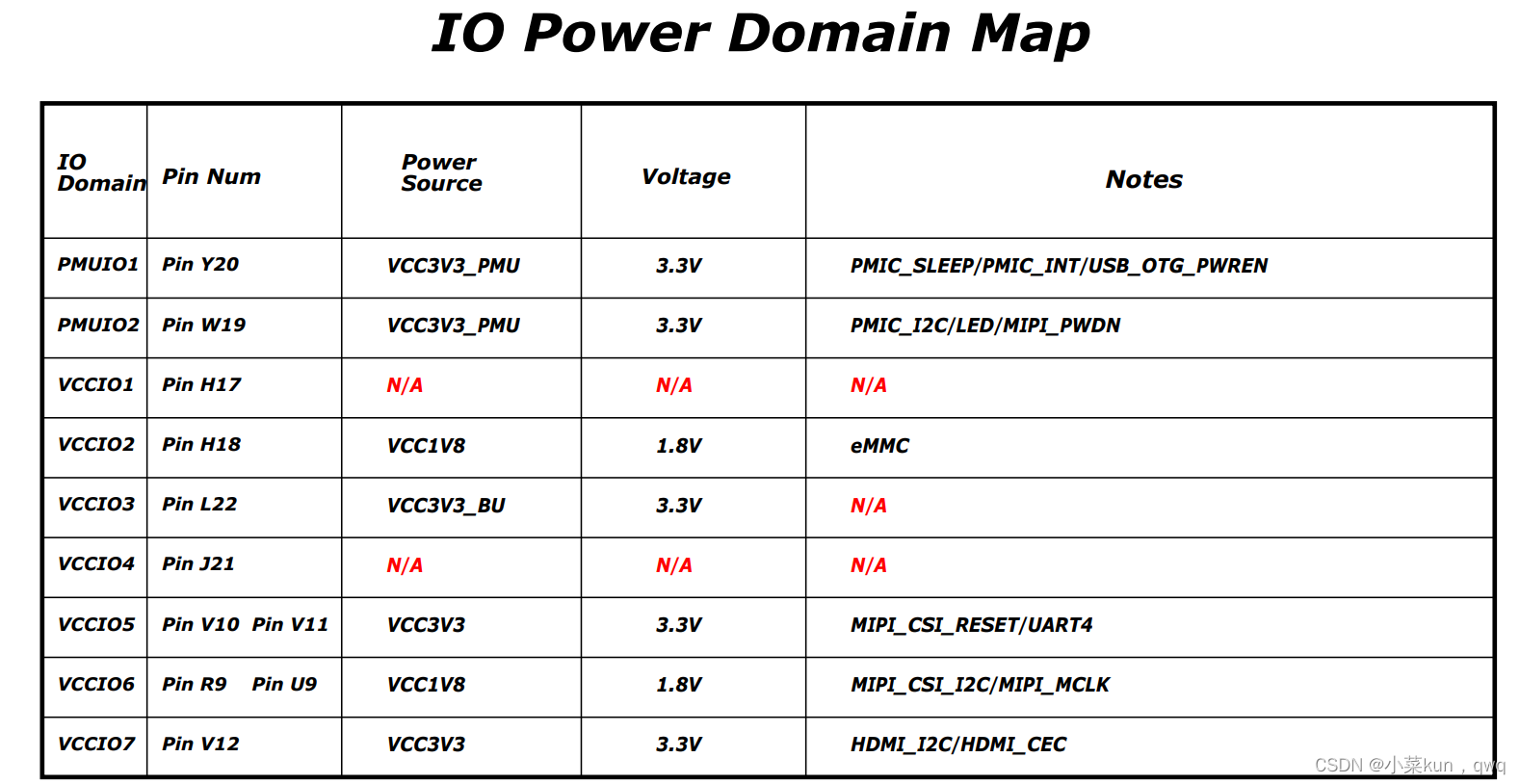
配置的电源域配置为
- &pmu_io_domains {
- status = "okay";
-
- //自己的板子电源域配置
- pmuio1-supply = <&vcc3v3_pmu>;
- pmuio2-supply = <&vcc3v3_pmu>;
- vccio1-supply = <&vccio_0v>;
- vccio3-supply = <&vccio_sd>;
- vccio4-supply = <&vccio_0v>;
- vccio5-supply = <&vcc_3v3>;
- vccio6-supply = <&vcc_1v8>;
- vccio7-supply = <&vcc_3v3>;
- };
-
-
- &i2c0 {
- rk809: pmic@20 {
- regulators {
- //自己的板子不输出电压
- vccio_0v: LDO_REG4 {
- regulator-always-off;
- regulator-boot-on;
- regulator-min-microvolt = <3300000>;
- regulator-max-microvolt = <3300000>;
- regulator-name = "vccio_0v";
- regulator-state-mem {
- regulator-off-in-suspend;
- };
- };
-
- /*
- //默认LDO_REG4节点配置
- vccio_acodec: LDO_REG4 {
- regulator-always-on;
- regulator-boot-on;
- regulator-min-microvolt = <3300000>;
- regulator-max-microvolt = <3300000>;
- regulator-name = "vccio_acodec";
- regulator-state-mem {
- regulator-off-in-suspend;
- };
- };
- */
- };
- };
- };

3.更改调试串口
修改uboot的调试串口
找到SDK工程中rkbin/tools/目录下的ddrbin_param.txt文件
对其进行如下的修改:
uart id=4
uart iomux=1
在rkbin/tools/目录下执行以下命令,使新配置生效
./ddrbin_tool ddrbin_param.txt ../bin/rk35/rk3568_ddr_1560MHz_v1.13.bin
修改uboot设备树中调试串口的配置
找到SDK工程u-boot/arch/arm/dts/目录下的rk3568-u-boot.dtsi设备树文件
修改如下:
- / {
- aliases {
- serial4 = &uart4; //添加uart4的配置
- ethernet0 = &gmac0;
- ethernet1 = &gmac1;
- mmc0 = &sdhci;
- mmc1 = &sdmmc0;
- mmc2 = &sdmmc1;
- };
-
- chosen {
- stdout-path = &uart4; //uart2->uart4
- u-boot,spl-boot-order = &sdmmc0, &sdhci, &nandc0, &spi_nand, &spi_nor;
- };
- };
-
-
- &uart4 { //uart2->uart4
- clock-frequency = <24000000>;
- u-boot,dm-spl;
- /delete-property/ pinctrl-names;
- /delete-property/ pinctrl-0;
- status = "okay";
- };
修改kernel的调试串口
在SDK工程对/kernel/arch/arm64/boot/dts/rockchip/目录下的rk3568-wheel-lpddr4.dts设备树文件中进行调试串口修改,修改后的调试串口节点如下:
- /{
- //调试串口配置uart2->uart4
- chosen:chosen {
- bootargs = "earlycon=uart8250,mmio32,0xfe680000 console=ttyFIQ0
- root=PARTUUID=614e0000-0000 rw rootwait"; //uart4的地址为0xfe680000
- };
-
- fiq-debugger { //uart2->uart4
- compatible = "rockchip,fiq-debugger";
- rockchip,serial-id = <4>; //uart4对应的serial-id为4
- rockchip,wake-irq = <0>;
- /* If enable uart uses irq instead of fiq */
- rockchip,irq-mode-enable = <1>;
- rockchip,baudrate = <1500000>; /* Only 115200 and 1500000 */
- interrupts = <GIC_SPI 252 IRQ_TYPE_LEVEL_LOW>;
- pinctrl-names = "default";
- pinctrl-0 = <&uart4m1_xfer>; //uart4使用的GPIO
- status = "okay";
- };
-
- //关闭uart4普通串口功能
- &uart4 {
- status = "disabled";
- };
更改完成后,需要对uboot和kernel进行重新编译
4.下载固件
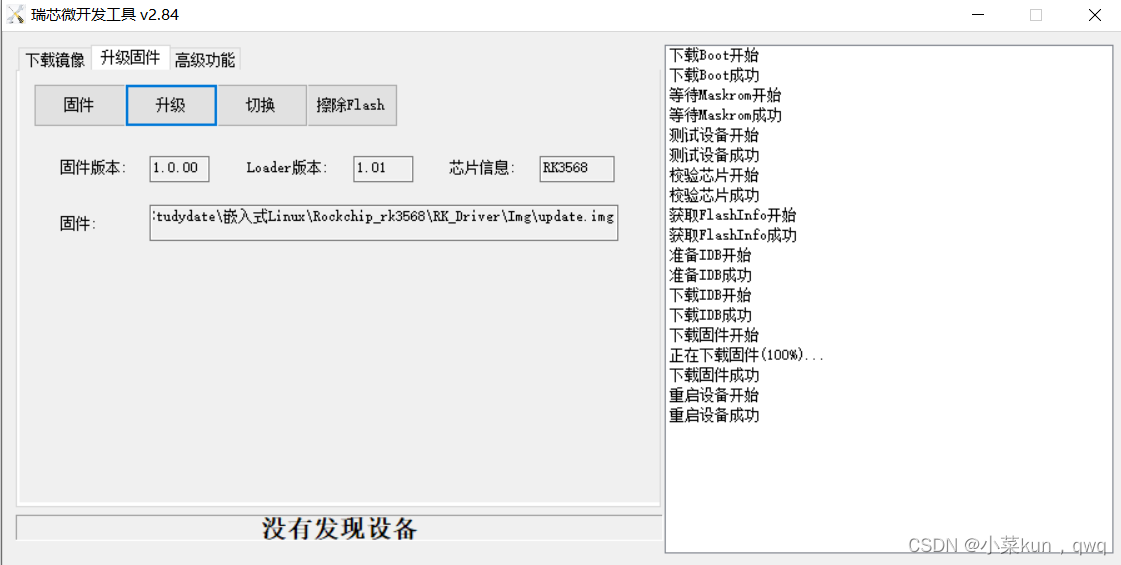
使用瑞芯微开发工具RKDevTool,它提供分立升级固件及整个 update 升级固件功能
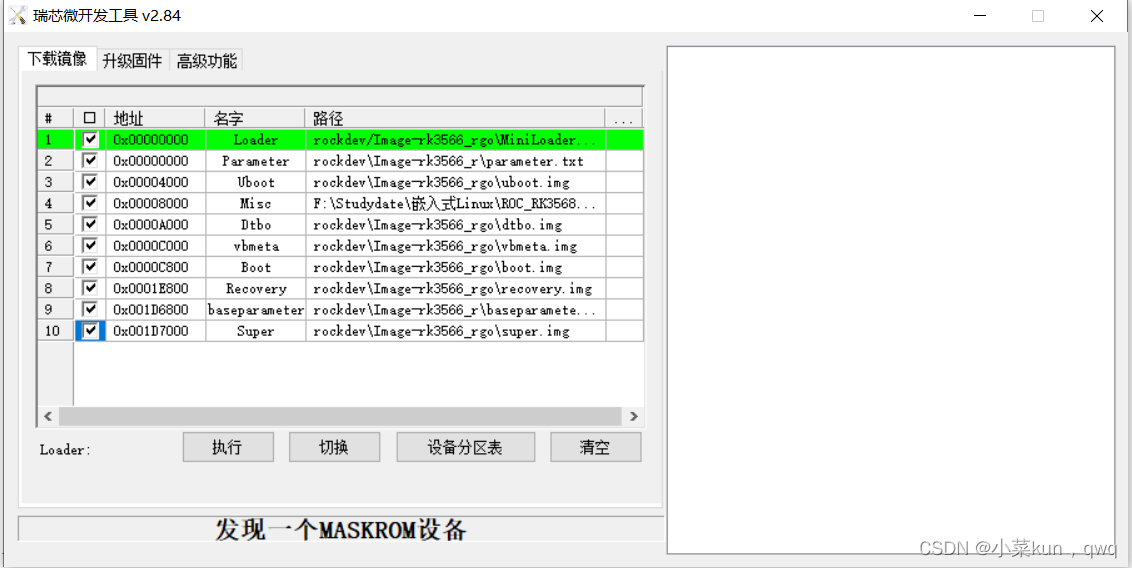
点击升级固件。点击固件,选择编译好的update.img镜像文件
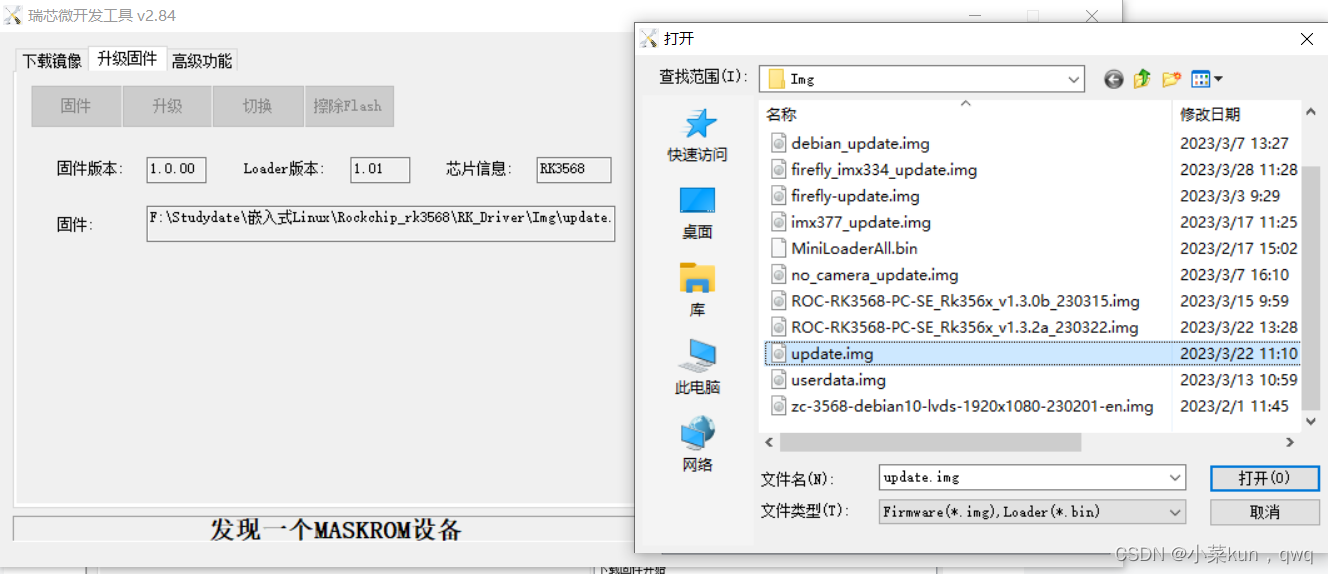
最后点击升级即可
5.查看调试信息
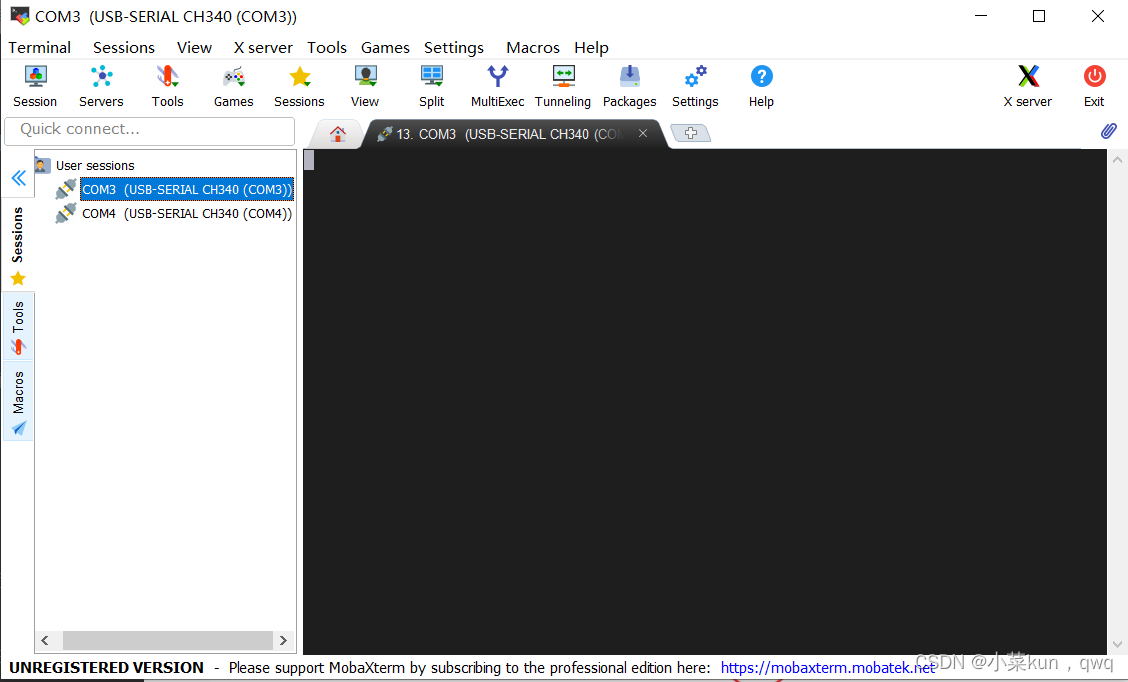
串口调试工具MobaXterm下载地址:https://mobaxterm.mobatek.net/
使用串口调试器连接PC端USB和板卡的UART4
打开串口调试工具MobaXterm。
-
选择
session为Serial。 -
将
Serial port修改为在设备管理器中找到的 COM 端口。 -
设置
Speed (bsp)为 1500000。 -
点击
OK按钮。
给板子上电,接收调试信息
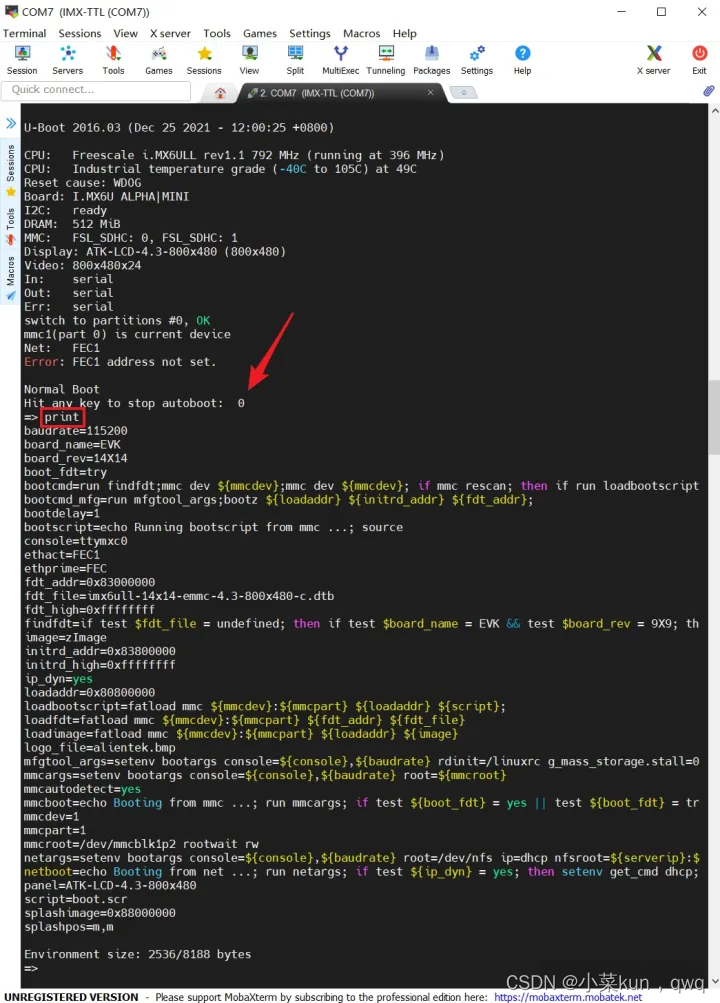
根据调试信息,定位系统出现问题的位置,对内核进行相应的修改
根据SDK工程docs/Common/DDR目录下的Rockchip_Trouble_Shooting_DDR_CN.pdf(DDR问题排查手册)的描述。尝试通过降低内存的运行频率的方式来提高系统的稳定性。
6.降低内存的运行频率
找到SDK工程中rkbin/tools/目录下的ddrbin_param.txt文件
对其进行如下的修改:
/* Please get help from ddrbin_tool_user_guide.txt and './ddrbin_tool -h' */
start tag=0x12345678
ddr2_freq=
lp2_freq=
ddr3_freq=
lp3_freq=
ddr4_freq=
lp4_freq=1000 //将lpddr4的最高频率设置为1000Mhz
lp4x_freq=
lp5_freq=
在rkbin/tools/目录下执行以下命令,使新配置生效
./ddrbin_tool ddrbin_param.txt ../bin/rk35/rk3568_ddr_1560MHz_v1.13.bin
7.更新固件
配置生效后,重新编译内核并打包update.img系统镜像
./mkfirmware.sh
./build.sh updateimg
使用RKDevTool将新编译好的固件下载到板子当中(详细操作见4.4小节)
重新给板子上电,系统正常运行。成功进入buildrootGUI界面
五、debian根文件系统的构建
1.配置环境变量
export RK_ROOTFS_SYSTEM=debian
//如果是yocto 就export RK_ROOTFS_SYSTEM=yocto
2.编译debian
./build.sh debian
3.更新固件
执行以下命令,生成新的update.img
./mkfirmware.sh
./build.sh updateimg
使用RKDevTool将新编译好的固件下载到板子当中(详细操作见4.4小节)

