
热门标签
热门文章
- 1springboot3.0的新特性_springboot3.0新特性
- 2解决 three.js 模型颜色偏差问题_three 模型加载墙面颜色变了
- 3L1-036 A乘以B-java
- 4http://与www.开头的网站有什么区别
- 5C++ 指针与作用域_c++ 指针定义的作用域
- 6获取机器内存的三种方法_asmwbinvd
- 7win服务器系统2019和2016区别,Windows Server 2019和Windows Server, Version 1909的区别是什么?...
- 8Python中time模块详解[转]
- 9props与state的区别_state和props的区别
- 10JAVA获取当前进程的内存占用数和CPU利用率以及读写字节数并计算统计信息_java获取cpu使用率
当前位置: article > 正文
Ubuntu20.04安装Intelrealsense相机驱动(涉及Linux内核降级)_unsupported kernel version
作者:算法编织者2 | 2024-02-04 18:54:08
赞
踩
unsupported kernel version
一. 安装librealsense
下载源码
下载源码(指定2.50版本,为了与realsense-ros版本匹配)
sdk仓库地址(下载2.50版本):https://github.com/IntelRealSense/librealsense.git
安装依赖(拔掉realsense连接)
- sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
-
- sudo apt-get install libglfw3-dev
安装realsense所需的内核模块
- cd librealsense
-
- ./scripts/setup_udev_rules.sh
-
- ./scripts/patch-realsense-ubuntu-lts.sh
- #这一条命令执行会比较慢,我是配置了Ubuntu终端翻墙因此速度快一些
其中最后一步涉及linux内核版本问题,需要更改内核版本
例如我的报错为Unsupported kernel version 5.15.0-46-generic . (具体的忘记了),他会输出所需的内核版本5.11,而我的当前内核版本为5.15,可以使用指令uname -r 查看自己的内核;因此我需要对内核进行降级。
下载所需内核
参考链接:内核链接
与参考链接所作不同的是,我下载的内核部分为
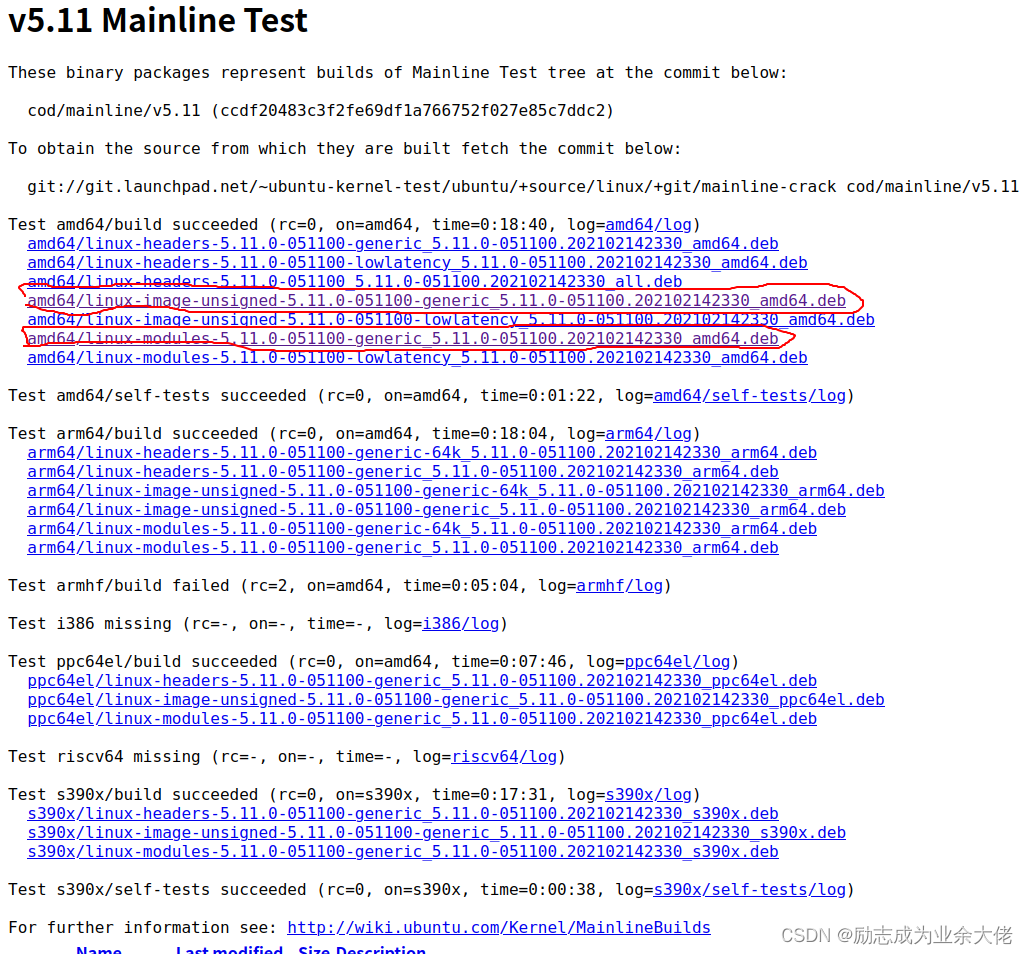
之后执行代码
sudo dpkg -i *.deb
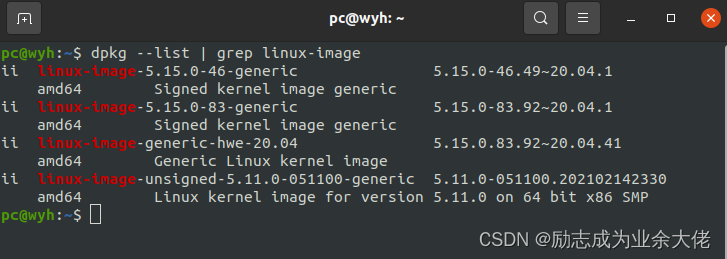
进行安装,安装之后可以执行代码
dpkg --list | grep linux-image查看自己当前所拥有的所有内核,如我想要的5.11已经安装好了,接下来就是修改本机的内核版本了
更新内核
如果直接使用此内核重启,在启动时会出现以下错误:
Kernel Panic - not syncing: VFS: Unable to mount root fs on unknown-block(0,0)
这就需要update-initramfs和更新grub。
- # 将5.11.0-051100-generic替换你需要的version
- sudo update-initramfs -u -k 5.11.0-051100-generic
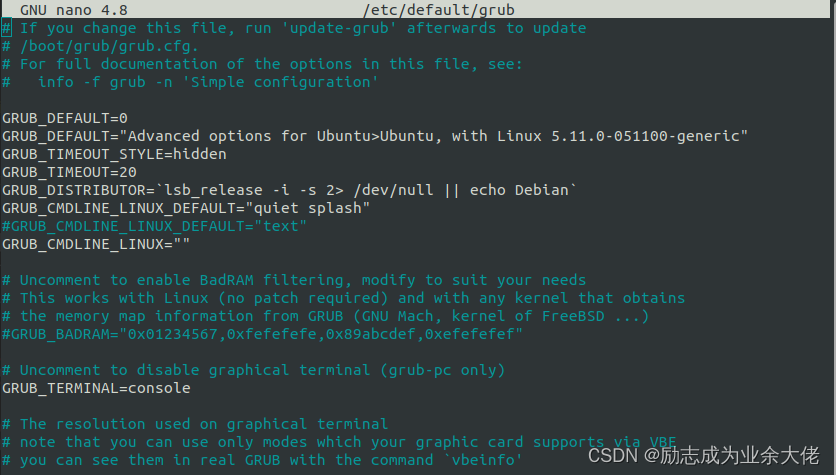
修改grub使5.11.0-051100-generic为默认启动项
sudo nano /etc/default/grub将GRUB_DEFAULT一项修改为:
"Advanced options for Ubuntu>Ubuntu, with Linux 5.11.0-051100-generic"
最后修改完的文件如图
 更新grub
更新grub
sudo update-grub查看是否安装成功
重启计算机
- sudo reboot
- uname -r
查看是否修改成功

编译安装
- mkdir build && cd build
-
- cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
-
- sudo make uninstall && make clean && make -j8 && sudo make install
测试
realsense-viewer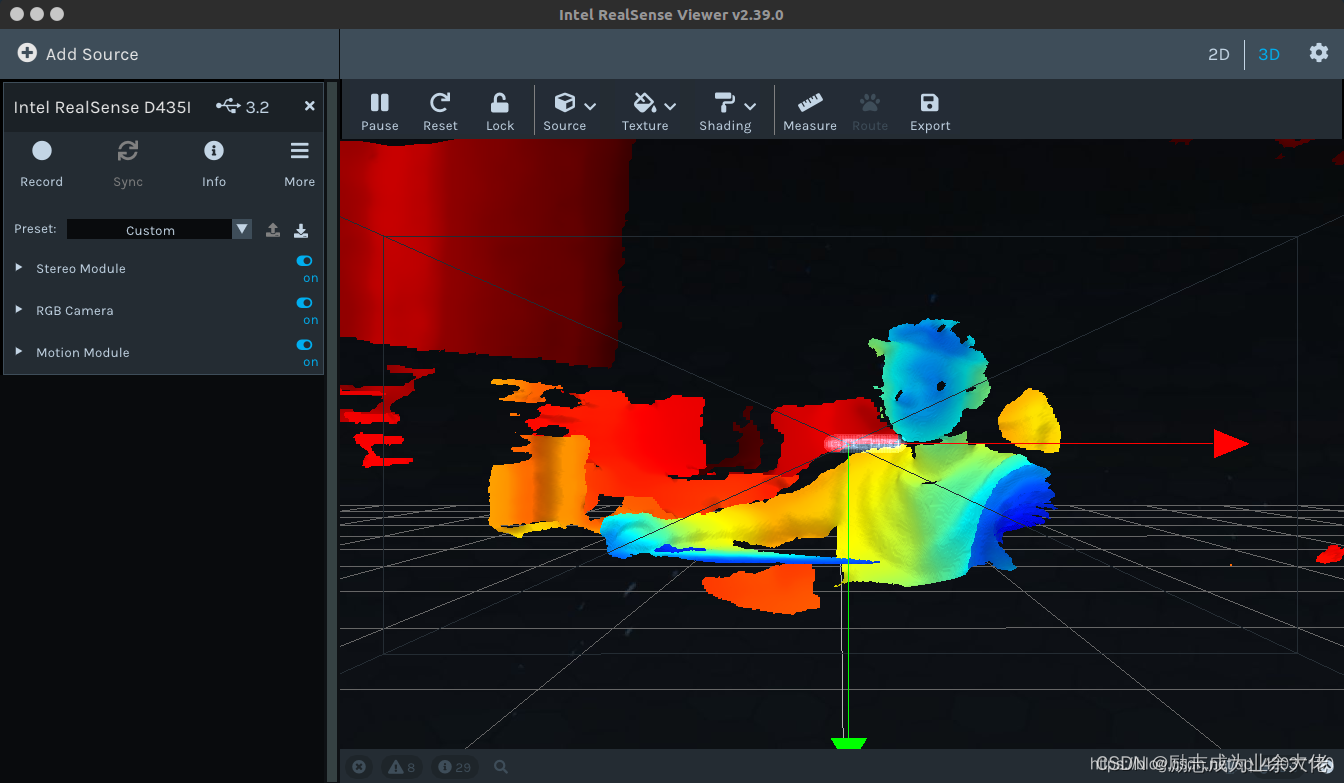
二. 安装realsense-ros
创建ros工作空间
mkdir -p ~/realsense_ws/src && cd ~/realsense_ws/src下载源码并检查依赖
- git clone -b 2.3.2 https://github.com/IntelRealSense/realsense-ros.git
- sudo apt install ros-$ROS_DISTRO-ddynamic-reconfigure
- cd ~/realsense_ws
- catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
- catkin_make install
- echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
测试
- roslaunch realsense2_camera rs_camera.launch
-
- rostopic list
- #查看话题列表
-
- rviz
- #打开rviz订阅几个节点就可以看到效果
到此realsense-ros安装完成,所有关于realsense的驱动都已经安装完了
参考博客:https://blog.csdn.net/qq_42037180/article/details/109163699
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59639
推荐阅读

相关标签

