
- 1Python江西南昌二手房源爬虫数据可视化分析大屏全屏系统 开题报告
- 2从4k到42k,软件测试工程师的涨薪史,给我看哭了
- 3linux centos 系统盘文件系统损坏-已解决_corruption of in-memory data detected
- 4【Linux】公网远程访问AMH服务器管理面板
- 5IOS 查看安装包的公钥 SHA1等信息
- 6IDEA常用插件(30个)_idea插件
- 7【微服务】服务网关----Gateway_gateway 服务覆盖
- 8代码随想录刷题题Day29
- 9什么是云服务器,阿里云优势如何?
- 10周志华:“数据、算法、算力”人工智能三要素,在未来要加上“知识”| CCF-GAIR 2020...
博主自己对于stm32的spi讲解_stm32 spi apb
赞
踩
除非特别说明->本部分适用于整个 STM32F4xx 系列。
spi概论:
它可用于多种用途,包括基于双线的单工同步传输,其中一条可作为双向数据线,或使用CRC 校验实现可靠通信,它可在全双工模式(使用 4 引脚)或半双工模式(使用 3 个引脚)下作为从器件或主器件工作.
SPI特性(特点):
● 基于四条线的全双工同步传输
● 基于双线的单工同步传输,其中一条可作为双向数据线
● 8 位或 16 位传输帧格式选择
● 主模式或从模式操作
● 多主模式功能
● 8 个主模式波特率预分频器(最大值为 f PCLK /2)
● 从模式频率(最大值为 f PCLK /2)
● 对于主模式和从模式都可实现更快的通信
● 对于主模式和从模式都可通过硬件或软件进行 NSS 管理:动态切换主/从操作
● 可编程的时钟极性和相位
● 可编程的数据顺序,最先移位 MSB 或 LSB
● 可触发中断的专用发送和接收标志
● SPI 总线忙状态标志
● SPI TI 模式
● 用于确保可靠通信的硬件 CRC 功能:
— 在发送模式下可将 CRC 值作为最后一个字节发送
— 根据收到的最后一个字节自动进行 CRC 错误校验
● 可触发中断的主模式故障、上溢和 CRC 错误标志
● 具有 DMA 功能的 1 字节发送和接收缓冲器:发送和接收请求
SPI 通过 4 个引脚与外部器件连接:
● MISO:主输入/从输出数据。此引脚可用于在从模式下发送数据和在主模式下接收数据。
● MOSI:主输出/从输入数据。此引脚可用于在主模式下发送数据和在从模式下接收数据。
● SCK:用于 SPI 主器件的串行时钟输出以及 SPI 从器件的串行时钟输入。
● NSS:从器件选择。这是用于选择从器件的可选引脚。此引脚用作“片选”,可让 SPI主器件与从器件进行单独通信,从而并避免数据线上的竞争。从器件的 NSS 输入可由主器件上的标准 IO 端口驱动。NSS 引脚在使能(SSOE 位)时还可用作输出,并可在SPI 处于主模式配置时驱动为低电平。通过这种方式,只要器件配置成 NSS 硬件管理模式,所有连接到该主器件 NSS 引脚的其它器件 NSS 引脚都将呈现低电平,并因此而作为从器件。当配置为主模式,且 NSS 配置为输入(MSTR=1 且 SSOE=0)时,如果NSS 拉至低电平,SPI 将进入主模式故障状态:MSTR 位自动清零,并且器件配置为从模式
SPI“一对一”基本示例:
MOSI 引脚连接在一起,MISO 引脚连接在一起。通过这种方式,主器件和从器件之间以串行方式传输数据(最高有效位在前)。
特别注意:通信始终由主器件发起。当主器件通过 MOSI 引脚向从器件发送数据时,从器件MISO 引脚做出响应。这是一个数据输出和数据输入都由同一时钟进行同步的 1 全双工通信同时通过过程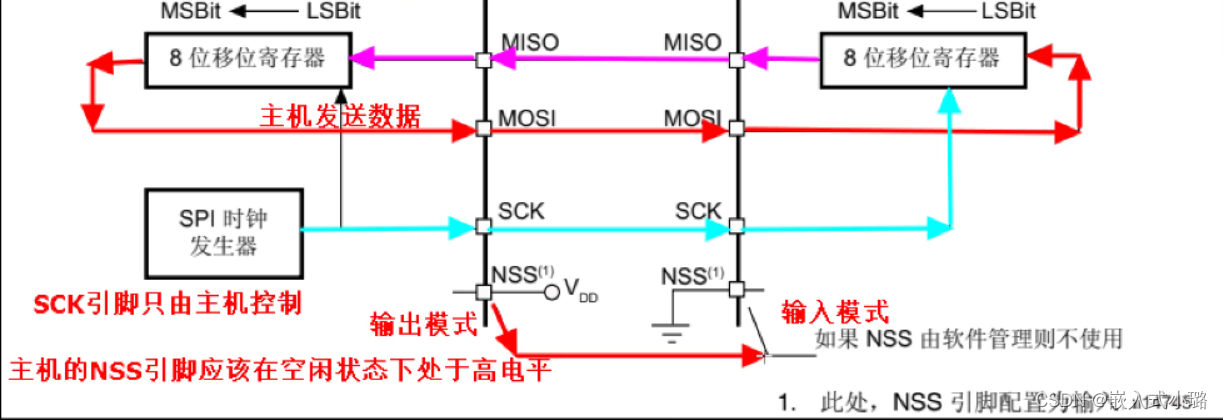
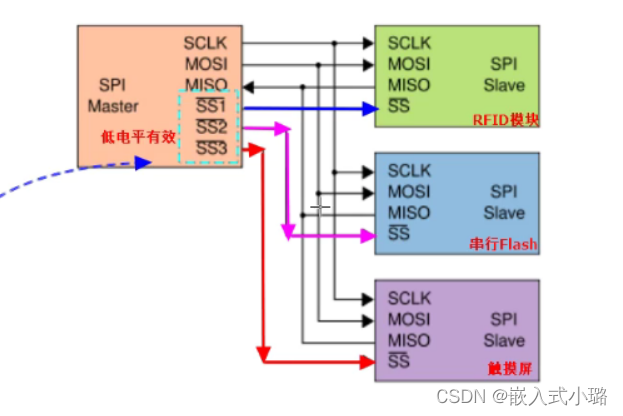
SPI“一对多”基本示例:
主机通过控制css引脚,对于从机的选择,如果设计css引脚拉低,从而从机的引脚也检测到低频信号,说明自己被选中,搜索ss1,ss2 ss3,几个片选引脚应该是互斥的,同一时刻,只有一个电平是低的.
SPI“如何通过css引脚对从机的选择:
● 软件管理 NSS (SSM = 1)--->(常用方式)
● 硬件管理 NSS (SSM = 0)
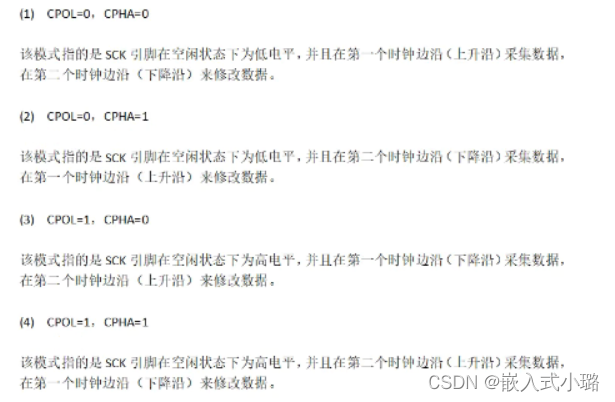
时钟相位和时钟极性:(决定了四种模式)
通过 SPI_CR1 寄存器中的 CPOL 和 CPHA 位,可以用软件选择四种可能的时序关系。
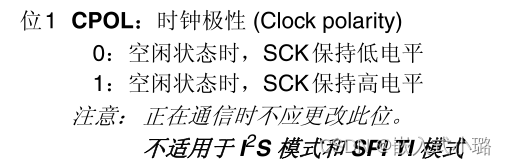
CPOL(时钟极性)位控制不传任何数据时的时钟电平状态。此位对主器件和从 器件都有作
用。如果复位 CPOL,SCK 引脚在空闲状态处于低电平。如果将 CPOL 置 1,SCK 引脚在
空闲状态处于高电平。
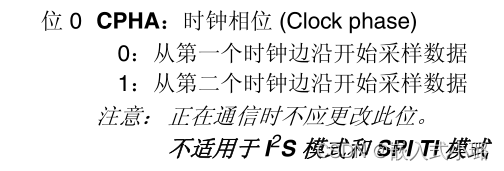
如果将 CPHA(时钟相位)位置 1,则 SCK 引脚上的第二个边沿(如果复位 CPOL 位,则为下降沿;如果将 CPOL 位置 1,则为上升沿)对 MSBit 采样。即,在第二个时钟边沿锁存数据。如果复位 CPHA 位,则 SCK 引脚上的第一个边沿(如果将 CPOL 位置 1,则为下降
沿;如果复位 CPOL 位,则为上升沿)对 MSBit 采样。即,在第一个时钟边沿锁存数据。
四种模式:(其中模式0和模式三较为常用)
四种模式的波形图示 :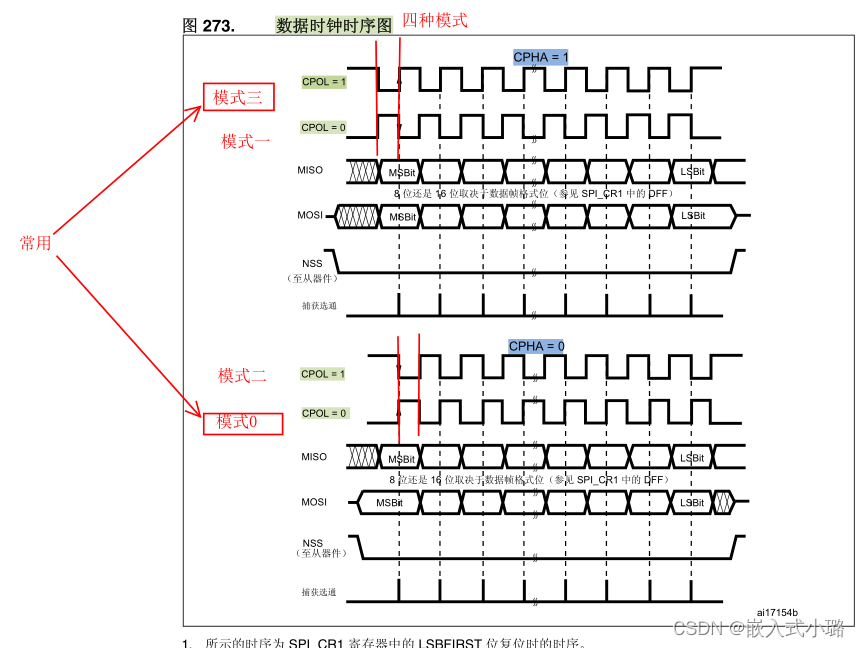
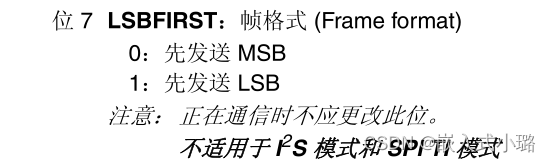
数据帧格式:
主机传输一位一位的传输,低位传输还是高位传输看从机。
移出数据时 MSB (高位)在前还是 LSB(低位) 在前取决于 SPI_CR1 寄存器中 LSBFIRST 位的值。每个数据帧的长度均为 8 位或 16 位,具体取决于使用 SPI_CR1 寄存器中的 DFF 位。所选
的数据帧格式适用于发送和/或接收。
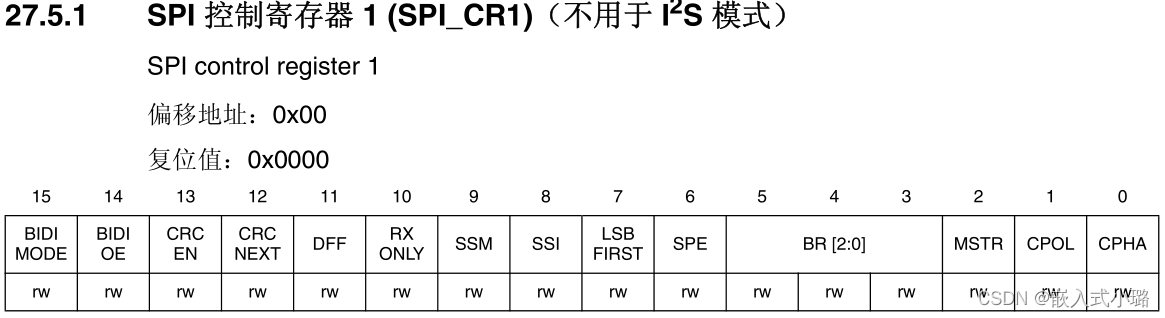
SPI寄存器的介绍:
SPI总线stm32代码配置的方式:







