
热门标签
热门文章
- 1初识鸿蒙跨平台开发框架ArkUI-X_鸿蒙开发平台
- 2[HTML]Web前端开发技术3(HTML5、CSS3、JavaScript )超链接,target,scrolling,marginwidth,frameborder,iframe——喵喵画网页
- 3C# Cad2016二次开发选择文本信息导出(六)
- 4数据库总结之高级篇_具体实现还是要看表选择的存储引擎
- 5Unity零基础到入门 ☀️| 游戏引擎 Unity 从0到1的 系统学习 路线【全面总结-建议收藏】!_unity学习路线
- 6《Linux从练气到飞升》No.21 Linux简单实现一个shell
- 7vue+face-api.js实现前端人脸识别功能
- 8MySQL练习《单表操作2》_在student表中查询年龄大于18的学生的所有信息
- 9关于“Python”的核心知识点整理大全45
- 10主机windows与虚拟机Ubuntu联动复制粘贴
当前位置: article > 正文
关于ROS订阅和发布中的问题笔记_python ros 消息订阅 callback 执行时间太久导致数据处理不完
作者:编程领航者 | 2024-01-30 22:26:29
赞
踩
python ros 消息订阅 callback 执行时间太久导致数据处理不完
前言:在学习知乎大佬的定位文章 从零开始做自动驾驶定位(三): 软件框架 。其中提到:
gnss_callback {
gnss 数据解析,赋给变量 gnss_data
}
lidar_callback {
雷达数据解析,得到lidar_data
融合(lidar_data, gnss_data)
}
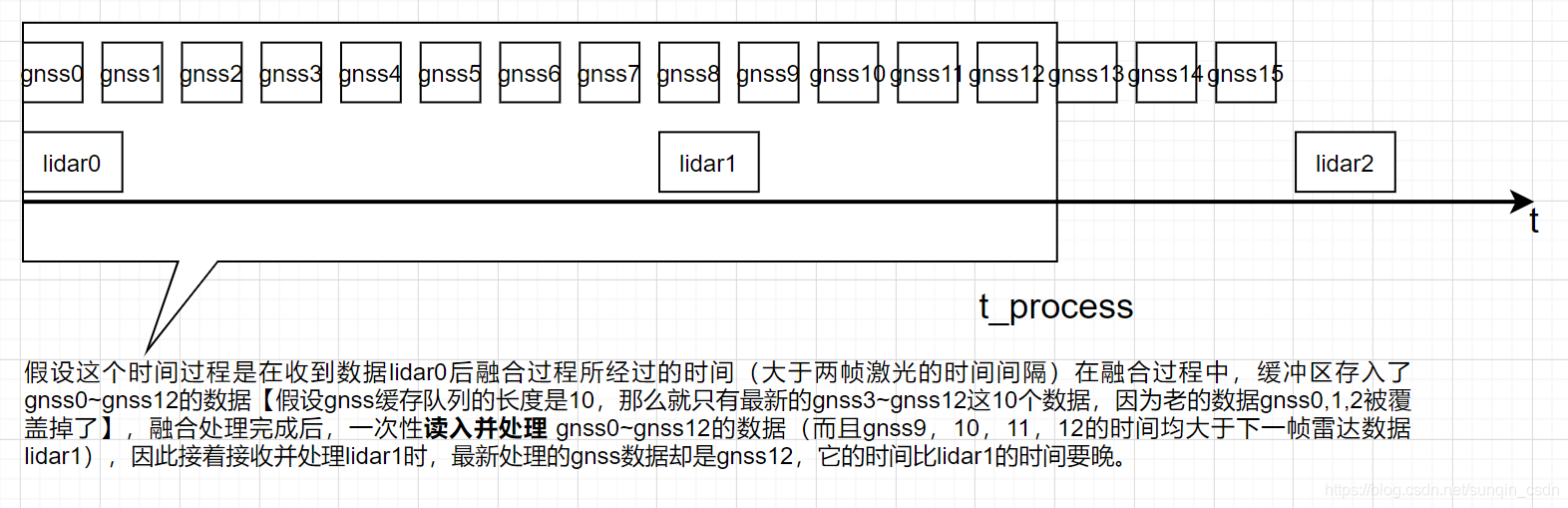
问题在于当融合算法处理时间比较长,超出了传感器信息的发送周期的时候,未被接收的数据会被放在每个subscriber对应的缓冲区中,等当前融合步骤处理完之后,下次ros从缓冲区中读取数据的时候,会先把gnss的数据读完,然后再读lidar的数据,这就导致,我们再一次进入lidar_callback函数时,使用的gnss_data已经不是和这个lidar_data同一时刻的数据了,而是它后面时刻的数据。
我对上面话的理解时这样的:
纸上得来终觉浅,绝知此事要躬行。之前以为出现这种情况时只会有一些老的数据被覆盖掉,而在时间上,两个回调会保持时间上的顺序,经过最终验证,发现我原来的理解时错的。话不多说,这里直接上源码:
“test_ros_pub.cpp”,分别以1Hz和10Hz的频率发布 geometry_msgs::PointStamped 类型的消息topic1, topic2;
#include <ros/ros.h> #include <std_msgs/Int32.h> #include <geometry_msgs/PointStamped.h> #include <iostream> geometry_msgs::PointStamped msg1; geometry_msgs::PointStamped msg2; int main(int argc, char** argv) { ros::init(argc, argv, "test_ros_pub"); ros::NodeHandle nh; ros::Publisher pub1 = nh.advertise<geometry_msgs::PointStamped>("topic1", 10, true); ros::Publisher pub2 = nh.advertise<geometry_msgs::PointStamped>("topic2", 10, true); int i = 1; ros::Rate loop_rate(10); while(ros::ok(

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/49908
推荐阅读


相关标签

