
热门标签
热门文章
- 1Swift使用第三方库MJExtension_mjextention有swift版本吗
- 2AtCoder褐名记
- 3Codeforces Round #700 (Div. 2)-AB题_codeforces div2 700
- 4论文笔记:Color Balance and Fusion for Underwater Image Enhancement(论文及源代码下载链接+公式分析+论文实验MATLAP代码分析)_uciqe
- 5Python 线程,进程,多线程,多进程以及并行执行for循环笔记_pythonfor循环嵌入多进程
- 6【计算机毕设】基于SpringBoot 的二手图书交易系统设计与实现_二手书平台毕业设计
- 7B站狂神Docker学习笔记
- 8python、C# 写企业微信机器人推送【图文消息】_python 企业微信机器人推送图文
- 9Ubuntu 18.04安装D435i 相机驱动及Ros1 Wrapper_ubuntu18.04安装realsense d435i相机sdk及realsense-ros
- 10归并排序_for(k=p,i=0,j=0;i
当前位置: article > 正文
深入浅出 diffusion(4):pytorch 实现简单 diffusion
作者:zyabc | 2024-01-30 15:56:58
赞
踩
深入浅出 diffusion(4):pytorch 实现简单 diffusion
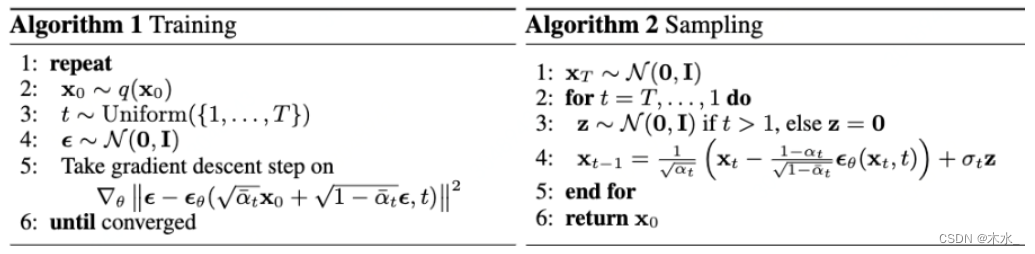
1. 训练和采样流程
2. 无条件实现
- import torch, time, os
- import numpy as np
- import torch.nn as nn
- import torch.optim as optim
- from torchvision.datasets import MNIST
- from torchvision import transforms
- from torch.utils.data import DataLoader
- from torchvision.utils import save_image
- import torch.nn.functional as F
-
-
- class ResidualConvBlock(nn.Module):
- def __init__(
- self, in_channels: int, out_channels: int, is_res: bool = False
- ) -> None:
- super().__init__()
- '''
- standard ResNet style convolutional block
- '''
- self.same_channels = in_channels==out_channels
- self.is_res = is_res
- self.conv1 = nn.Sequential(
- nn.Conv2d(in_channels, out_channels, 3, 1, 1),
- nn.BatchNorm2d(out_channels),
- nn.GELU(),
- )
- self.conv2 = nn.Sequential(
- nn.Conv2d(out_channels, out_channels, 3, 1, 1),
- nn.BatchNorm2d(out_channels),
- nn.GELU(),
- )
-
- def forward(self, x: torch.Tensor) -> torch.Tensor:
- if self.is_res:
- x1 = self.conv1(x)
- x2 = self.conv2(x1)
- # this adds on correct residual in case channels have increased
- if self.same_channels:
- out = x + x2
- else:
- out = x1 + x2
- return out / 1.414
- else:
- x1 = self.conv1(x)
- x2 = self.conv2(x1)
- return x2
-
-
- class UnetDown(nn.Module):
- def __init__(self, in_channels, out_channels):
- super(UnetDown, self).__init__()
- '''
- process and downscale the image feature maps
- '''
- layers = [ResidualConvBlock(in_channels, out_channels), nn.MaxPool2d(2)]
- self.model = nn.Sequential(*layers)
-
- def forward(self, x):
- return self.model(x)
-
-
- class UnetUp(nn.Module):
- def __init__(self, in_channels, out_channels):
- super(UnetUp, self).__init__()
- '''
- process and upscale the image feature maps
- '''
- layers = [
- nn.ConvTranspose2d(in_channels, out_channels, 2, 2),
- ResidualConvBlock(out_channels, out_channels),
- ResidualConvBlock(out_channels, out_channels),
- ]
- self.model = nn.Sequential(*layers)
-
- def forward(self, x, skip):
- x = torch.cat((x, skip), 1)
- x = self.model(x)
- return x
-
-
- class EmbedFC(nn.Module):
- def __init__(self, input_dim, emb_dim):
- super(EmbedFC, self).__init__()
- '''
- generic one layer FC NN for embedding things
- '''
- self.input_dim = input_dim
- layers = [
- nn.Linear(input_dim, emb_dim),
- nn.GELU(),
- nn.Linear(emb_dim, emb_dim),
- ]
- self.model = nn.Sequential(*layers)
-
- def forward(self, x):
- x = x.view(-1, self.input_dim)
- return self.model(x)
- class Unet(nn.Module):
- def __init__(self, in_channels, n_feat=256):
- super(Unet, self).__init__()
-
- self.in_channels = in_channels
- self.n_feat = n_feat
-
- self.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)
-
- self.down1 = UnetDown(n_feat, n_feat)
- self.down2 = UnetDown(n_feat, 2 * n_feat)
-
- self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())
-
- self.timeembed1 = EmbedFC(1, 2 * n_feat)
- self.timeembed2 = EmbedFC(1, 1 * n_feat)
-
- self.up0 = nn.Sequential(
- # nn.ConvTranspose2d(6 * n_feat, 2 * n_feat, 7, 7), # when concat temb and cemb end up w 6*n_feat
- nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, 7, 7), # otherwise just have 2*n_feat
- nn.GroupNorm(8, 2 * n_feat),
- nn.ReLU(),
- )
-
- self.up1 = UnetUp(4 * n_feat, n_feat)
- self.up2 = UnetUp(2 * n_feat, n_feat)
- self.out = nn.Sequential(
- nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1),
- nn.GroupNorm(8, n_feat),
- nn.ReLU(),
- nn.Conv2d(n_feat, self.in_channels, 3, 1, 1),
- )
-
- def forward(self, x, t):
- '''
- 输入加噪图像和对应的时间step,预测反向噪声的正态分布
- :param x: 加噪图像
- :param t: 对应step
- :return: 正态分布噪声
- '''
- x = self.init_conv(x)
- down1 = self.down1(x)
- down2 = self.down2(down1)
- hiddenvec = self.to_vec(down2)
-
- # embed time step
- temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)
- temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)
-
- # 将上采样输出与step编码相加,输入到下一个上采样层
- up1 = self.up0(hiddenvec)
- up2 = self.up1(up1 + temb1, down2)
- up3 = self.up2(up2 + temb2, down1)
- out = self.out(torch.cat((up3, x), 1))
- return out
-
- class DDPM(nn.Module):
- def __init__(self, model, betas, n_T, device):
- super(DDPM, self).__init__()
- self.model = model.to(device)
-
- # register_buffer 可以提前保存alpha相关,节约时间
- for k, v in self.ddpm_schedules(betas[0], betas[1], n_T).items():
- self.register_buffer(k, v)
-
- self.n_T = n_T
- self.device = device
- self.loss_mse = nn.MSELoss()
-
- def ddpm_schedules(self, beta1, beta2, T):
- '''
- 提前计算各个step的alpha,这里beta是线性变化
- :param beta1: beta的下限
- :param beta2: beta的下限
- :param T: 总共的step数
- '''
- assert beta1 < beta2 < 1.0, "beta1 and beta2 must be in (0, 1)"
-
- beta_t = (beta2 - beta1) * torch.arange(0, T + 1, dtype=torch.float32) / T + beta1 # 生成beta1-beta2均匀分布的数组
- sqrt_beta_t = torch.sqrt(beta_t)
- alpha_t = 1 - beta_t
- log_alpha_t = torch.log(alpha_t)
- alphabar_t = torch.cumsum(log_alpha_t, dim=0).exp() # alpha累乘
-
- sqrtab = torch.sqrt(alphabar_t) # 根号alpha累乘
- oneover_sqrta = 1 / torch.sqrt(alpha_t) # 1 / 根号alpha
-
- sqrtmab = torch.sqrt(1 - alphabar_t) # 根号下(1-alpha累乘)
- mab_over_sqrtmab_inv = (1 - alpha_t) / sqrtmab
-
- return {
- "alpha_t": alpha_t, # \alpha_t
- "oneover_sqrta": oneover_sqrta, # 1/\sqrt{\alpha_t}
- "sqrt_beta_t": sqrt_beta_t, # \sqrt{\beta_t}
- "alphabar_t": alphabar_t, # \bar{\alpha_t}
- "sqrtab": sqrtab, # \sqrt{\bar{\alpha_t}} # 加噪标准差
- "sqrtmab": sqrtmab, # \sqrt{1-\bar{\alpha_t}} # 加噪均值
- "mab_over_sqrtmab": mab_over_sqrtmab_inv, # (1-\alpha_t)/\sqrt{1-\bar{\alpha_t}}
- }
- def forward(self, x):
- """
- 训练过程中, 随机选择step和生成噪声
- """
- # 随机选择step
- _ts = torch.randint(1, self.n_T + 1, (x.shape[0],)).to(self.device) # t ~ Uniform(0, n_T)
- # 随机生成正态分布噪声
- noise = torch.randn_like(x) # eps ~ N(0, 1)
- # 加噪后的图像x_t
- x_t = (
- self.sqrtab[_ts, None, None, None] * x
- + self.sqrtmab[_ts, None, None, None] * noise
-
- )
-
- # 将unet预测的对应step的正态分布噪声与真实噪声做对比
- return self.loss_mse(noise, self.model(x_t, _ts / self.n_T))
-
- def sample(self, n_sample, size, device):
- # 随机生成初始噪声图片 x_T ~ N(0, 1)
- x_i = torch.randn(n_sample, *size).to(device)
- for i in range(self.n_T, 0, -1):
- t_is = torch.tensor([i / self.n_T]).to(device)
- t_is = t_is.repeat(n_sample, 1, 1, 1)
-
- z = torch.randn(n_sample, *size).to(device) if i > 1 else 0
-
- eps = self.model(x_i, t_is)
- x_i = x_i[:n_sample]
- x_i = self.oneover_sqrta[i] * (x_i - eps * self.mab_over_sqrtmab[i]) + self.sqrt_beta_t[i] * z
- return x_i
-
-
- class ImageGenerator(object):
- def __init__(self):
- '''
- 初始化,定义超参数、数据集、网络结构等
- '''
- self.epoch = 20
- self.sample_num = 100
- self.batch_size = 256
- self.lr = 0.0001
- self.n_T = 400
- self.device = 'cuda' if torch.cuda.is_available() else 'cpu'
- self.init_dataloader()
- self.sampler = DDPM(model=Unet(in_channels=1), betas=(1e-4, 0.02), n_T=self.n_T, device=self.device).to(self.device)
- self.optimizer = optim.Adam(self.sampler.model.parameters(), lr=self.lr)
-
- def init_dataloader(self):
- '''
- 初始化数据集和dataloader
- '''
- tf = transforms.Compose([
- transforms.ToTensor(),
- ])
- train_dataset = MNIST('./data/',
- train=True,
- download=True,
- transform=tf)
- self.train_dataloader = DataLoader(train_dataset, batch_size=self.batch_size, shuffle=True, drop_last=True)
- val_dataset = MNIST('./data/',
- train=False,
- download=True,
- transform=tf)
- self.val_dataloader = DataLoader(val_dataset, batch_size=self.batch_size, shuffle=False)
-
- def train(self):
- self.sampler.train()
- print('训练开始!!')
- for epoch in range(self.epoch):
- self.sampler.model.train()
- loss_mean = 0
- for i, (images, labels) in enumerate(self.train_dataloader):
- images, labels = images.to(self.device), labels.to(self.device)
-
- # 将latent和condition拼接后输入网络
- loss = self.sampler(images)
- loss_mean += loss.item()
- self.optimizer.zero_grad()
- loss.backward()
- self.optimizer.step()
- train_loss = loss_mean / len(self.train_dataloader)
- print('epoch:{}, loss:{:.4f}'.format(epoch, train_loss))
- self.visualize_results(epoch)
-
- @torch.no_grad()
- def visualize_results(self, epoch):
- self.sampler.eval()
- # 保存结果路径
- output_path = 'results/Diffusion'
- if not os.path.exists(output_path):
- os.makedirs(output_path)
-
- tot_num_samples = self.sample_num
- image_frame_dim = int(np.floor(np.sqrt(tot_num_samples)))
- out = self.sampler.sample(tot_num_samples, (1, 28, 28), self.device)
- save_image(out, os.path.join(output_path, '{}.jpg'.format(epoch)), nrow=image_frame_dim)
-
-
-
- if __name__ == '__main__':
- generator = ImageGenerator()
- generator.train()

3. 有条件实现
- import torch, time, os
- import numpy as np
- import torch.nn as nn
- import torch.optim as optim
- from torchvision.datasets import MNIST
- from torchvision import transforms
- from torch.utils.data import DataLoader
- from torchvision.utils import save_image
- import torch.nn.functional as F
-
-
- class ResidualConvBlock(nn.Module):
- def __init__(
- self, in_channels: int, out_channels: int, is_res: bool = False
- ) -> None:
- super().__init__()
- '''
- standard ResNet style convolutional block
- '''
- self.same_channels = in_channels==out_channels
- self.is_res = is_res
- self.conv1 = nn.Sequential(
- nn.Conv2d(in_channels, out_channels, 3, 1, 1),
- nn.BatchNorm2d(out_channels),
- nn.GELU(),
- )
- self.conv2 = nn.Sequential(
- nn.Conv2d(out_channels, out_channels, 3, 1, 1),
- nn.BatchNorm2d(out_channels),
- nn.GELU(),
- )
-
- def forward(self, x: torch.Tensor) -> torch.Tensor:
- if self.is_res:
- x1 = self.conv1(x)
- x2 = self.conv2(x1)
- # this adds on correct residual in case channels have increased
- if self.same_channels:
- out = x + x2
- else:
- out = x1 + x2
- return out / 1.414
- else:
- x1 = self.conv1(x)
- x2 = self.conv2(x1)
- return x2
-
-
- class UnetDown(nn.Module):
- def __init__(self, in_channels, out_channels):
- super(UnetDown, self).__init__()
- '''
- process and downscale the image feature maps
- '''
- layers = [ResidualConvBlock(in_channels, out_channels), nn.MaxPool2d(2)]
- self.model = nn.Sequential(*layers)
-
- def forward(self, x):
- return self.model(x)
-
-
- class UnetUp(nn.Module):
- def __init__(self, in_channels, out_channels):
- super(UnetUp, self).__init__()
- '''
- process and upscale the image feature maps
- '''
- layers = [
- nn.ConvTranspose2d(in_channels, out_channels, 2, 2),
- ResidualConvBlock(out_channels, out_channels),
- ResidualConvBlock(out_channels, out_channels),
- ]
- self.model = nn.Sequential(*layers)
-
- def forward(self, x, skip):
- x = torch.cat((x, skip), 1)
- x = self.model(x)
- return x
-
-
- class EmbedFC(nn.Module):
- def __init__(self, input_dim, emb_dim):
- super(EmbedFC, self).__init__()
- '''
- generic one layer FC NN for embedding things
- '''
- self.input_dim = input_dim
- layers = [
- nn.Linear(input_dim, emb_dim),
- nn.GELU(),
- nn.Linear(emb_dim, emb_dim),
- ]
- self.model = nn.Sequential(*layers)
-
- def forward(self, x):
- x = x.view(-1, self.input_dim)
- return self.model(x)
- class Unet(nn.Module):
- def __init__(self, in_channels, n_feat=256, n_classes=10):
- super(Unet, self).__init__()
-
- self.in_channels = in_channels
- self.n_feat = n_feat
-
- self.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)
-
- self.down1 = UnetDown(n_feat, n_feat)
- self.down2 = UnetDown(n_feat, 2 * n_feat)
-
- self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())
-
- self.timeembed1 = EmbedFC(1, 2 * n_feat)
- self.timeembed2 = EmbedFC(1, 1 * n_feat)
- self.conditionembed1 = EmbedFC(n_classes, 2 * n_feat)
- self.conditionembed2 = EmbedFC(n_classes, 1 * n_feat)
-
- self.up0 = nn.Sequential(
- # nn.ConvTranspose2d(6 * n_feat, 2 * n_feat, 7, 7), # when concat temb and cemb end up w 6*n_feat
- nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, 7, 7), # otherwise just have 2*n_feat
- nn.GroupNorm(8, 2 * n_feat),
- nn.ReLU(),
- )
-
- self.up1 = UnetUp(4 * n_feat, n_feat)
- self.up2 = UnetUp(2 * n_feat, n_feat)
- self.out = nn.Sequential(
- nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1),
- nn.GroupNorm(8, n_feat),
- nn.ReLU(),
- nn.Conv2d(n_feat, self.in_channels, 3, 1, 1),
- )
-
- def forward(self, x, c, t):
- '''
- 输入加噪图像和对应的时间step,预测反向噪声的正态分布
- :param x: 加噪图像
- :param c: contition向量
- :param t: 对应step
- :return: 正态分布噪声
- '''
- x = self.init_conv(x)
- down1 = self.down1(x)
- down2 = self.down2(down1)
- hiddenvec = self.to_vec(down2)
-
- # embed time step
- temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)
- temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)
- cemb1 = self.conditionembed1(c).view(-1, self.n_feat * 2, 1, 1)
- cemb2 = self.conditionembed2(c).view(-1, self.n_feat, 1, 1)
-
- # 将上采样输出与step编码相加,输入到下一个上采样层
- up1 = self.up0(hiddenvec)
- up2 = self.up1(cemb1 * up1 + temb1, down2)
- up3 = self.up2(cemb2 * up2 + temb2, down1)
- out = self.out(torch.cat((up3, x), 1))
- return out
-
- class DDPM(nn.Module):
- def __init__(self, model, betas, n_T, device):
- super(DDPM, self).__init__()
- self.model = model.to(device)
-
- # register_buffer 可以提前保存alpha相关,节约时间
- for k, v in self.ddpm_schedules(betas[0], betas[1], n_T).items():
- self.register_buffer(k, v)
-
- self.n_T = n_T
- self.device = device
- self.loss_mse = nn.MSELoss()
-
- def ddpm_schedules(self, beta1, beta2, T):
- '''
- 提前计算各个step的alpha,这里beta是线性变化
- :param beta1: beta的下限
- :param beta2: beta的下限
- :param T: 总共的step数
- '''
- assert beta1 < beta2 < 1.0, "beta1 and beta2 must be in (0, 1)"
-
- beta_t = (beta2 - beta1) * torch.arange(0, T + 1, dtype=torch.float32) / T + beta1 # 生成beta1-beta2均匀分布的数组
- sqrt_beta_t = torch.sqrt(beta_t)
- alpha_t = 1 - beta_t
- log_alpha_t = torch.log(alpha_t)
- alphabar_t = torch.cumsum(log_alpha_t, dim=0).exp() # alpha累乘
-
- sqrtab = torch.sqrt(alphabar_t) # 根号alpha累乘
- oneover_sqrta = 1 / torch.sqrt(alpha_t) # 1 / 根号alpha
-
- sqrtmab = torch.sqrt(1 - alphabar_t) # 根号下(1-alpha累乘)
- mab_over_sqrtmab_inv = (1 - alpha_t) / sqrtmab
-
- return {
- "alpha_t": alpha_t, # \alpha_t
- "oneover_sqrta": oneover_sqrta, # 1/\sqrt{\alpha_t}
- "sqrt_beta_t": sqrt_beta_t, # \sqrt{\beta_t}
- "alphabar_t": alphabar_t, # \bar{\alpha_t}
- "sqrtab": sqrtab, # \sqrt{\bar{\alpha_t}} # 加噪标准差
- "sqrtmab": sqrtmab, # \sqrt{1-\bar{\alpha_t}} # 加噪均值
- "mab_over_sqrtmab": mab_over_sqrtmab_inv, # (1-\alpha_t)/\sqrt{1-\bar{\alpha_t}}
- }
-
- def forward(self, x, c):
- """
- 训练过程中, 随机选择step和生成噪声
- """
- # 随机选择step
- _ts = torch.randint(1, self.n_T + 1, (x.shape[0],)).to(self.device) # t ~ Uniform(0, n_T)
- # 随机生成正态分布噪声
- noise = torch.randn_like(x) # eps ~ N(0, 1)
- # 加噪后的图像x_t
- x_t = (
- self.sqrtab[_ts, None, None, None] * x
- + self.sqrtmab[_ts, None, None, None] * noise
-
- )
-
- # 将unet预测的对应step的正态分布噪声与真实噪声做对比
- return self.loss_mse(noise, self.model(x_t, c, _ts / self.n_T))
-
- def sample(self, n_sample, c, size, device):
- # 随机生成初始噪声图片 x_T ~ N(0, 1)
- x_i = torch.randn(n_sample, *size).to(device)
- for i in range(self.n_T, 0, -1):
- t_is = torch.tensor([i / self.n_T]).to(device)
- t_is = t_is.repeat(n_sample, 1, 1, 1)
-
- z = torch.randn(n_sample, *size).to(device) if i > 1 else 0
-
- eps = self.model(x_i, c, t_is)
- x_i = x_i[:n_sample]
- x_i = self.oneover_sqrta[i] * (x_i - eps * self.mab_over_sqrtmab[i]) + self.sqrt_beta_t[i] * z
- return x_i
-
-
- class ImageGenerator(object):
- def __init__(self):
- '''
- 初始化,定义超参数、数据集、网络结构等
- '''
- self.epoch = 20
- self.sample_num = 100
- self.batch_size = 256
- self.lr = 0.0001
- self.n_T = 400
- self.device = 'cuda' if torch.cuda.is_available() else 'cpu'
- self.init_dataloader()
- self.sampler = DDPM(model=Unet(in_channels=1), betas=(1e-4, 0.02), n_T=self.n_T, device=self.device).to(self.device)
- self.optimizer = optim.Adam(self.sampler.model.parameters(), lr=self.lr)
-
- def init_dataloader(self):
- '''
- 初始化数据集和dataloader
- '''
- tf = transforms.Compose([
- transforms.ToTensor(),
- ])
- train_dataset = MNIST('./data/',
- train=True,
- download=True,
- transform=tf)
- self.train_dataloader = DataLoader(train_dataset, batch_size=self.batch_size, shuffle=True, drop_last=True)
- val_dataset = MNIST('./data/',
- train=False,
- download=True,
- transform=tf)
- self.val_dataloader = DataLoader(val_dataset, batch_size=self.batch_size, shuffle=False)
-
- def train(self):
- self.sampler.train()
- print('训练开始!!')
- for epoch in range(self.epoch):
- self.sampler.model.train()
- loss_mean = 0
- for i, (images, labels) in enumerate(self.train_dataloader):
- images, labels = images.to(self.device), labels.to(self.device)
- labels = F.one_hot(labels, num_classes=10).float()
- # 将latent和condition拼接后输入网络
- loss = self.sampler(images, labels)
- loss_mean += loss.item()
- self.optimizer.zero_grad()
- loss.backward()
- self.optimizer.step()
- train_loss = loss_mean / len(self.train_dataloader)
- print('epoch:{}, loss:{:.4f}'.format(epoch, train_loss))
- self.visualize_results(epoch)
-
- @torch.no_grad()
- def visualize_results(self, epoch):
- self.sampler.eval()
- # 保存结果路径
- output_path = 'results/Diffusion'
- if not os.path.exists(output_path):
- os.makedirs(output_path)
-
- tot_num_samples = self.sample_num
- image_frame_dim = int(np.floor(np.sqrt(tot_num_samples)))
- labels = F.one_hot(torch.Tensor(np.repeat(np.arange(10), 10)).to(torch.int64), num_classes=10).to(self.device).float()
- out = self.sampler.sample(tot_num_samples, labels, (1, 28, 28), self.device)
- save_image(out, os.path.join(output_path, '{}.jpg'.format(epoch)), nrow=image_frame_dim)
-
-
-
- if __name__ == '__main__':
- generator = ImageGenerator()
- generator.train()
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/47400?site
推荐阅读


相关标签

