
热门标签
热门文章
- 1Microsoft Visual C++ 14.0 is required解决方法_microsoft visual c++ 14.0离线安装
- 2自学大语言模型的应用程序框架Langchain(初入门)_langchain应用框架
- 3vue自定义抽屉组件_vue 抽屉组件 适用手机端
- 4一文学会Axios的使用
- 5STM32F4存储器映射 和 寄存器映射_stm32f4重映射
- 6您知道用 Docker打包 Springboot有多少种方式?
- 7kail-添加静态路由_kali添加路由命令
- 8linux磁盘空间查看及空间满的处理,linux磁盘空间占满问题快速定位并解决
- 9C语言:对称二叉树_对称二叉树c语言
- 10AI之DL:人工智能领域—深度学习的发展历程之深度学习爆发的三大因素、探究DL为什么耗算力
当前位置: article > 正文
基于STM32F103C8T6的六路寻迹小车制作攻略_c8t6循迹车
作者:数据可视化灵魂 | 2024-01-30 12:27:57
赞
踩
c8t6循迹车
文章目录
前言
寻迹小车是一个入门级别的东西,可以通过制作一辆寻迹小车熟悉单片机的一些基础操作,比如运用GPIO口、串口通信等单片机知识。寻迹我采用的是数字量,并没有使用模拟量。数字量会更加容易上手。做寻迹小车最花费时间的地方就是调PWM,需要我们自己一点点去改去试,所以需要有耐心一点。话不多说,进入正文
一、所需材料
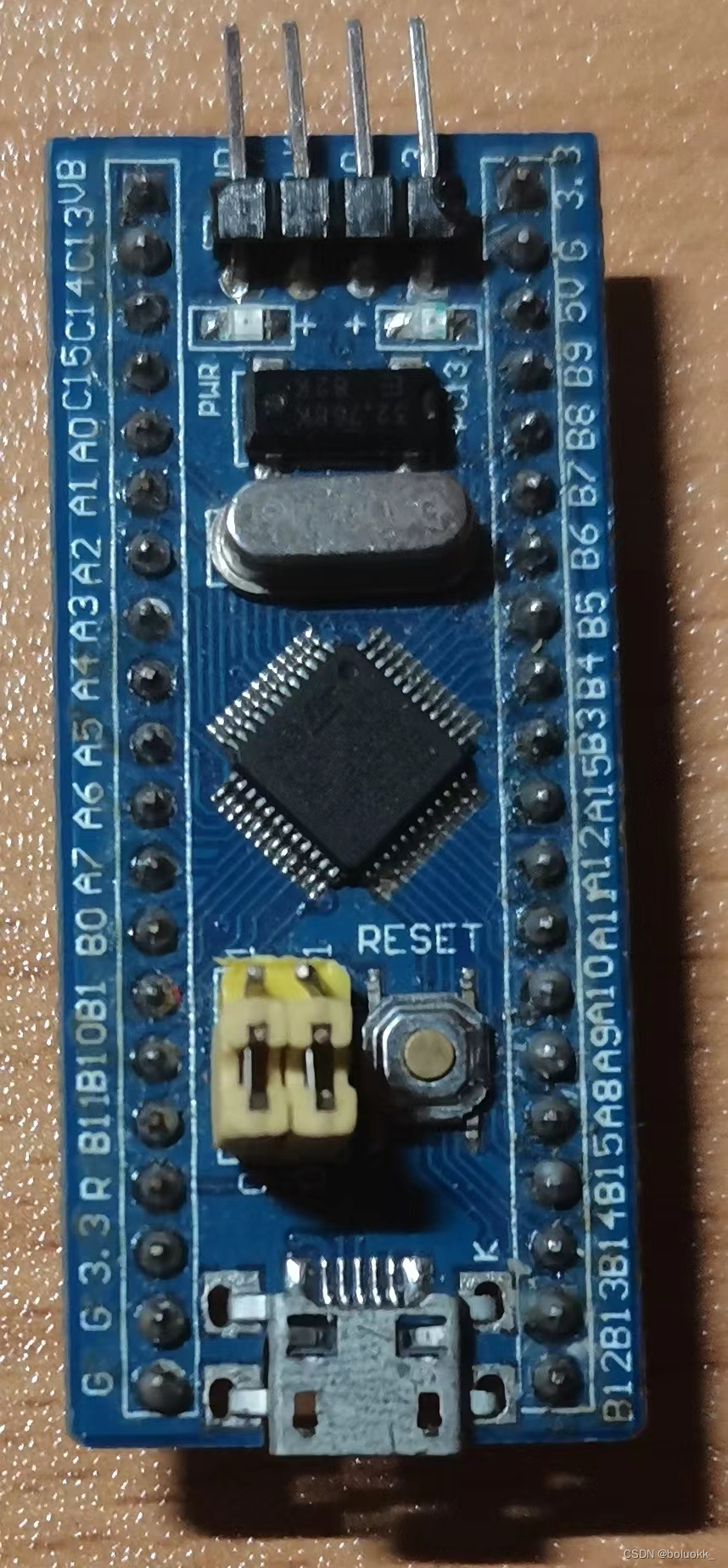
1、STM32F103C8T6最小系统板
具体引脚图我会跟代码放在同一个文件夹
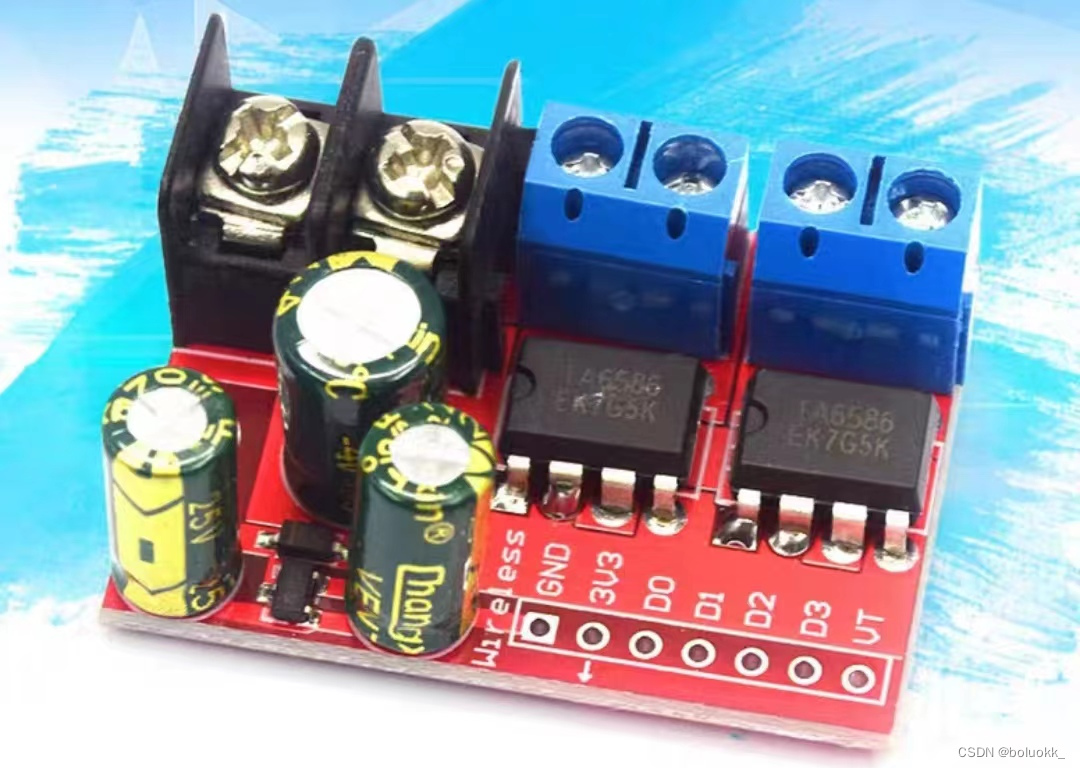
2、L298N电机驱动
可以换成TB6612,性能会比这个好一点
3、降压模块LM2596S*2
一个降压到3.3v给单片机供电
一个作为可调给电机驱动和寻迹供电

4、寻迹模块(最好采用4个)
博主这里只用到了六路,中间两个没用
可以换成TCRT5000,更加便宜噢


5、电池7.4v
记得买一个接线式DC公头

6、STLINKv2仿真编程器
一定要注意好引脚之间的对接,有个小技巧就是都接好后,可以用黑胶带把杜邦线连在一起,下次再插入就可以更准确更快了

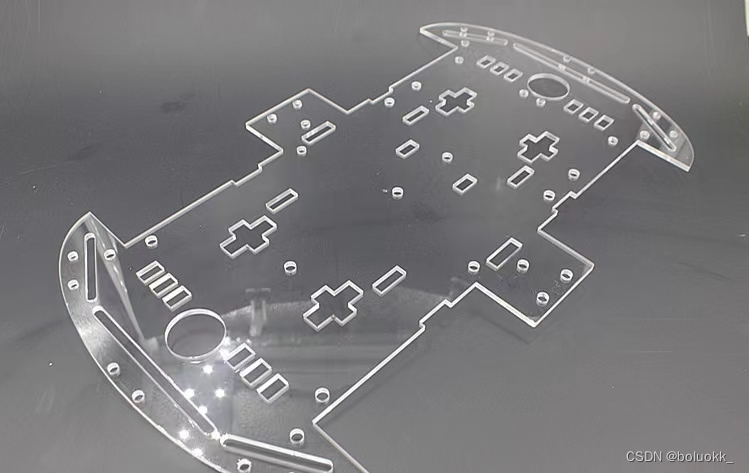
7、电机、轮子、底板、电机支架


8、黑胶带、铜柱、杜邦线
黑胶布用来自制赛道
9、螺丝刀
电子人人手一个,为了以后更好地打螺丝
二、组装步骤
详细步骤可以参考博主同学:无言侠的博客
以下是具体链接:
Arduino循迹小车教程二----组装篇_无言侠的博客-CSDN博客_arduino循迹小车组装说明书
其中我们的寻迹模块使用并不相同,寻迹模块可以参考无言侠的,也可以使用博主的
三、代码讲解
完整代码文件我会放在文章的最后。
1.寻迹函数
.c文件
- void xunji_Init(void)
- {
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_5|GPIO_Pin_9;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- }
.h文件
- #ifndef __XUNJI_H
- #define __XUNJI_H
-
-
- void xunji_Init(void);
-
-
- #endif
2.PWM函数
具体PWM的理解,需要自己去学习噢
.c文件
- void PWM_Init(void)
- {
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_1|GPIO_Pin_0;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- TIM_InternalClockConfig(TIM2);
-
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInitStructure.TIM_Period = 900 - 1; //ARR
- TIM_TimeBaseInitStructure.TIM_Prescaler = 0; //PSC
- TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
-
- TIM_OCInitTypeDef TIM_OCInitStructure;
- TIM_OCStructInit(&TIM_OCInitStructure);
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_Pulse = 899; //CCR
-
- TIM_OC1Init(TIM2, &TIM_OCInitStructure);
- TIM_OC2Init(TIM2, &TIM_OCInitStructure);
- TIM_OC3Init(TIM2, &TIM_OCInitStructure);
- TIM_OC4Init(TIM2, &TIM_OCInitStructure);
-
- TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
- TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
- TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
- TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
-
- TIM_Cmd(TIM2, ENABLE);
- }
-
- void PWM_SetCompare1(uint16_t Compare)
- {
- TIM_SetCompare1(TIM2, Compare);
- }
-
- void PWM_SetCompare2(uint16_t Compare)
- {
- TIM_SetCompare2(TIM2, Compare);
- }
-
-
- void PWM_SetCompare3(uint16_t Compare)
- {
- TIM_SetCompare3(TIM2, Compare);
- }
-
- void PWM_SetCompare4(uint16_t Compare)
- {
- TIM_SetCompare4(TIM2, Compare);
- }

.h文件
- #ifndef __PWM_H
- #define __PWM_H
-
- void PWM_Init(void);
- void PWM_SetCompare1(uint16_t Compare);
- void PWM_SetCompare2(uint16_t Compare);
- void PWM_SetCompare3(uint16_t Compare);
- void PWM_SetCompare4(uint16_t Compare);
-
-
- #endif
3、电机函数
.c文件
- #include "stm32f10x.h" // Device header
- #include "PWM.h"
- //A3-D0,A2-D1,A1-D2,A0-D1
- void Motor_Init(void)
- {
- PWM_Init();
- }
-
- void go(void)
- {
- PWM_SetCompare1(900);
- PWM_SetCompare2(700);
- PWM_SetCompare3(900);
- PWM_SetCompare4(700);
- }
- void smallright(void)
- {
- PWM_SetCompare1(900);
- PWM_SetCompare2(400);
- PWM_SetCompare3(700);
- PWM_SetCompare4(900);
- }
-
- void middleright(void)
- {
- PWM_SetCompare1(900);
- PWM_SetCompare2(320);
- PWM_SetCompare3(700);
- PWM_SetCompare4(900);
- }
-
- void bigright(void)
- {
- PWM_SetCompare1(900);
- PWM_SetCompare2(5);
- PWM_SetCompare3(900);
- PWM_SetCompare4(800);
- }
-
- void smallleft(void)
- {
- PWM_SetCompare1(900);
- PWM_SetCompare2(700);
- PWM_SetCompare3(320);
- PWM_SetCompare4(900);
- }
-
- void middleleft(void)
- {
- PWM_SetCompare1(900);
- PWM_SetCompare2(700);
- PWM_SetCompare3(350);
- PWM_SetCompare4(900);
- }
-
- void bigleft(void)
- {
- PWM_SetCompare1(800);
- PWM_SetCompare2(900);
- PWM_SetCompare3(0);
- PWM_SetCompare4(900);
- }
-
- void stop(void)
- {
- PWM_SetCompare1(0);
- PWM_SetCompare2(0);
- PWM_SetCompare3(0);
- PWM_SetCompare4(0);
- }
.h文件
- #ifndef __MOTOR_H
- #define __MOTOR_H
-
- void Motor_Init(void);
- void go(void);
- void smallright(void);
- void smallleft(void);
- void middleright(void);
- void middleleft(void);
- void bigright(void);
- void bigleft(void);
- void stop(void);
-
- #endif
4、主函数
- int main(void)
- {
- xunji_Init();
- Motor_Init();
-
- while (1)
- {
- RIGHT1 = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_4);
- RIGHT2 = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5);
- RIGHT3 = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_6);
- LEFT1 = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7);
- LEFT2 = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_8);
- LEFT3 = GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9);
- if(RIGHT1==0 && RIGHT2==0 && RIGHT3==0 && LEFT1==0 && LEFT2==0 && LEFT3==0)
- {
- go();
- }
- if(RIGHT1==0 && RIGHT2==0 && RIGHT3==1 && LEFT1==0 && LEFT2==0 && LEFT3==0)
- {
- smallright();
- }
- if(RIGHT1==0 && RIGHT2==1 && RIGHT3==0 && LEFT1==0 && LEFT2==0 && LEFT3==0)
- {
- middleright();
- }
- if(RIGHT1==1 && RIGHT2==0 && RIGHT3==0 && LEFT1==0 && LEFT2==0 && LEFT3==0)
- {
- bigright();
- }
- if(RIGHT1==0 && RIGHT2==0 && RIGHT3==0 && LEFT1==1 && LEFT2==0 && LEFT3==0)
- {
- smallleft();
- }
- if(RIGHT1==0 && RIGHT2==0 && RIGHT3==0 && LEFT1==0 && LEFT2==1 && LEFT3==0)
- {
- middleleft();
- }
- if(RIGHT1==0 && RIGHT2==0 && RIGHT3==0 && LEFT1==0 && LEFT2==0 && LEFT3==1)
- {
- bigleft();
- }
- if(RIGHT1==1 && RIGHT2==1 && RIGHT3==1 && LEFT1==1 && LEFT2==1&& LEFT3==1)
- {
- stop();
- }
- }
- }
总结
链接:https://pan.baidu.com/s/1KTNfWI-aIuWDQmojF1umhA
提取码:xk30
想学arduino制作寻迹小车的可以无言侠噢!
勤动手,每天设立一个小目标,很快就能做到自己想要做到的事。
欢迎指教!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46443
推荐阅读



相关标签

