
- 1Linux文件系统与日志管理
- 2Linux中CPU亲和性
- 3比较稳妥的荣品 rk3399刷机,顺便解决无法进入刷入系统问题以及短接针脚刷机麻烦的问题
- 4选择排序 | 冒泡排序 | C语言(详解)
- 5【Spring Boot 3】【数据源】自定义JPA多数据源_springboot3 jpa 多数据源
- 6Jupyter Notebook本地部署并实现公网远程访问内网Jupyter服务器【内网穿透】_本地化部署 内网
- 7全网最全的 Java 技术栈内容梳理(持续更新中)_java技术栈
- 8KubeSphere 接入外部 Elasticsearch 最佳实践_kubesphere 外置es
- 9【最全】PS各个版本下载安装及小试牛刀教程(PhotoShop CS3 ~~ PhotoShop 2022)_ps csdn
- 10LeetCode2859. Sum of Values at Indices With K Set Bits
STM32智能循迹避障小车(2)避障功能的实现_stm32智能小车红外循迹超声波避障程序
赞
踩
一.硬件的选择与连接(增加模块,具体模块请看上篇)
1.HC_SR04超声波测距模块

二.原理介绍
1.超声波测距原理
超声波发射器向外发射超声波信号,同时定时器开始计时,超声波在空气中传播时若遇到障碍物就立即被反射回来,超声波接受器在收到反射波后立即停止定时器;超声波在空气中的传播速度约为340m/s,若定时器记录的时间为t(s),那么超声波传感器距离障碍的距离为s = 340 * t / 2;如下图:

2.超声波传感器原理
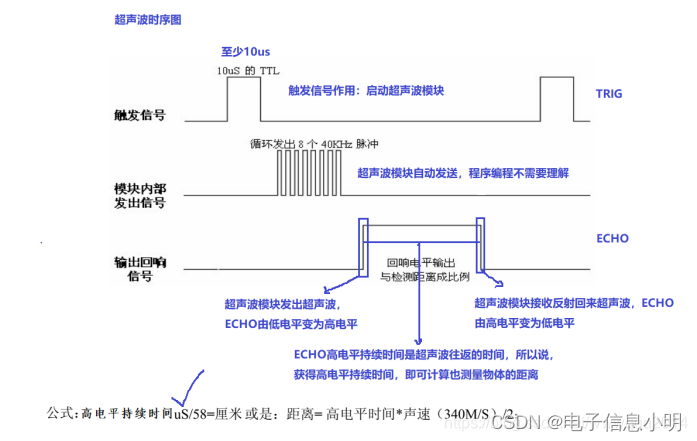
超声波传感器共有四个引脚Vcc,GND,Trig,Echo,其中Vcc和GND为供电引脚,模块工作时向Trig引脚发送一个持续10us以上的高电平行信号,超声波模块就对外发出8个40KHZ的超声波信号,发送完成后Echo引脚自动变为高电平,若超声波模块接收到被反射回来的回波信号Echo引脚又会自动变为低电平,即Echo引脚上高电平的持续时间即为超声波在空气中传播的时间。
3.程序实现
超声波测距:看完程序后我们总会对距离的表达方式会有疑问:所以首先先对以下两种距离表达进行分析。
第一种情况:
return (Time.us*340)/200.0;声音在干燥、摄氏 20度的空气中的传播速度大约为343米/秒,合34,300厘米/秒。或者,我们作一下单位换算,34,300除以1,000,000厘米/微秒。由于定时器定时设置的最小时长为100us(所以Time.us具体对应100*Time.us微秒),又因为距离为往返距离,所以需要除以2。
(Time.us*340)/200.0 = (Time.us*100*34000)/1000000/2(cm)
第二种情况:
(Time.us*100)/58;对于测试距离的解释:(即为什么us/58 =厘米)
声音在干燥、摄氏 20度的空气中的传播速度大约为343米/秒,合34,300厘米/秒。或者,我们作一下单位换算,34,300除以1,000,000厘米/微秒。即为:0.0343厘米/微秒,再换一个角度,1/(0.0343 厘米/微秒)即:29.15 微秒/厘米。
这就意味着,每291.5微秒表示1厘米的距离。1厘米就是29.15微秒。但是发送后到接收到回波,声音走过的是2倍的距离呀。所以实际距离就是1厘米,对应58.3微秒。所以换成距离cm,要除58。当然除以58.3可能更精确。
由于定时器定时设置的最小时长为100us(所以Time.us具体对应100*Time.us微秒)。
1.超声波测距模块
hc_sr04.h
- #ifndef __HC_SR04_H
- #define __HC_SR04_H
- #include "sys.h"
-
- #define Trig PBout(0)// PB0
- #define Echo GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)//读取Echo,PB1
-
- void HC_Init(void);
- float HC_Run(void);
-
- #endif
-
hc_sr04.c
- #include "hc_sr04.h"
- #include "delay.h"
- #include "timer.h"
- void HC_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能PB端口时钟
-
- /*Trig端口配置*/
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PB.0 端口配置
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.0
-
- /*Echo端口配置*/
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PB.1端口配置
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //设置成上拉输入
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.1
-
- Trig = 0; //初始化发射端为0
-
- }
- /*超声波测距运行主函数
- 原理:超声波模块发射端发送一个10us以上的脉冲,
- 发射脉冲后超声波模块会循环发射8个40KHz的脉冲信号,
- 接收端接收到超声波脉冲后会变为高电平,检测高电平时间就可以算出距离
- */
- float HC_Run(void)
- {
- Trig = 1;
- delay_us(15);
- Trig = 0;
-
- while(Echo == 0);
- TIM_Cmd(TIM3, ENABLE); //使能TIMx
- while(Echo == 1);
- TIM_Cmd(TIM3, DISABLE); //失能
- return (Time.us*340)/200.0;
- }

2.定时器计时模块
timer.h
- #ifndef __TIMER_H
- #define __TIMER_H
-
- #include "sys.h"
-
- //本程序只供学习使用,未经作者许可,不得用于其它任何用途
- //定时器 驱动代码
- //正点原子@ALIENTEK
- //技术论坛:www.openedv.com
-
- //时间参数
- typedef struct
- {
- unsigned int us;
- unsigned int ms;
- unsigned int s;
- unsigned int min;
- }Times;
- extern Times Time;
-
- void TIM3_Int_Init(u16 arr,u16 psc);
-
- #endif
timer.c
- #include "stm32f10x.h" // Device header
-
- #include "timer.h"
-
- //本程序只供学习使用,未经作者许可,不得用于其它任何用途
- //定时器 驱动代码
- //正点原子@ALIENTEK
- //技术论坛:www.openedv.co
-
- Times Time; //定义时间结构体
-
- //通用定时器3中断初始化
- //这里时钟选择为APB1的2倍,而APB1为36M
- //arr:自动重装值。
- //psc:时钟预分频数
- //这里使用的是定时器3!
- void TIM3_Int_Init(u16 arr,u16 psc)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
-
- //定时器TIM3初始化
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
-
- TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
-
- //中断优先级NVIC设置
- NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级0级
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
- NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
-
- TIM_Cmd(TIM3, DISABLE); //失能
-
- /*时间参数初始化*/
- Time.us = 0;
- Time.ms = 0;
- Time.s = 0;
- Time.min = 0;
- }
- //定时器3中断服务程序
- void TIM3_IRQHandler(void) //TIM3中断,100us进一次中断
- {
- if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否
- {
- TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志
- Time.us++;
- }
- }
避障功能即在测距功能基础上实现,如当超声波测距小于设定值时,再调用小车运动函数来进行合理避障。
本文只是自己在所做stm32循迹避障小车时的体会与笔记,所学浅薄,如有不对,还望指正。





