
热门标签
热门文章
- 1K8S 日志方案
- 2(附源码)springboot学生宿舍管理系统 毕业设计 211955_宿舍管理系统毕业设计
- 3【Linux】Linux之间如何互传文件(详细讲解)_linux把文件传到另一个linux
- 4JavaScript鼠标拖动事件监听使用方法及实例效果_监听鼠标移动
- 5【Elasticsearch篇】详解使用RestClient操作索引库的相关操作
- 6【Python】01快速上手爬虫案例一
- 7深度学习算法应用实战 | 利用 CLIP 模型进行“零样本图像分类”
- 8【C++进阶1--继承】面向对象三大特性之一(附菱形继承讲解
- 9qml学习----------------(progressBar)进度条的学习_qml progress bar 横向为纵向
- 10【Python】文件操作中的a,a+,w,w+几种方式的区别_转_python a+
当前位置: article > 正文
STM32(HAL库)驱动HC-SR04测距模块_hcsr04 stm32 自动跟随
作者:编程挑战者 | 2024-01-30 11:44:19
赞
踩
hcsr04 stm32 自动跟随
1、简介
本文介绍通过STM32F103C8T6单片机对HC-SR04测距模块进行驱动,并且通过串口对数据进行打印。
2、操作流程
2.1 Cubemax初始化配置
首先进行初始化配置,点击进行跳转。
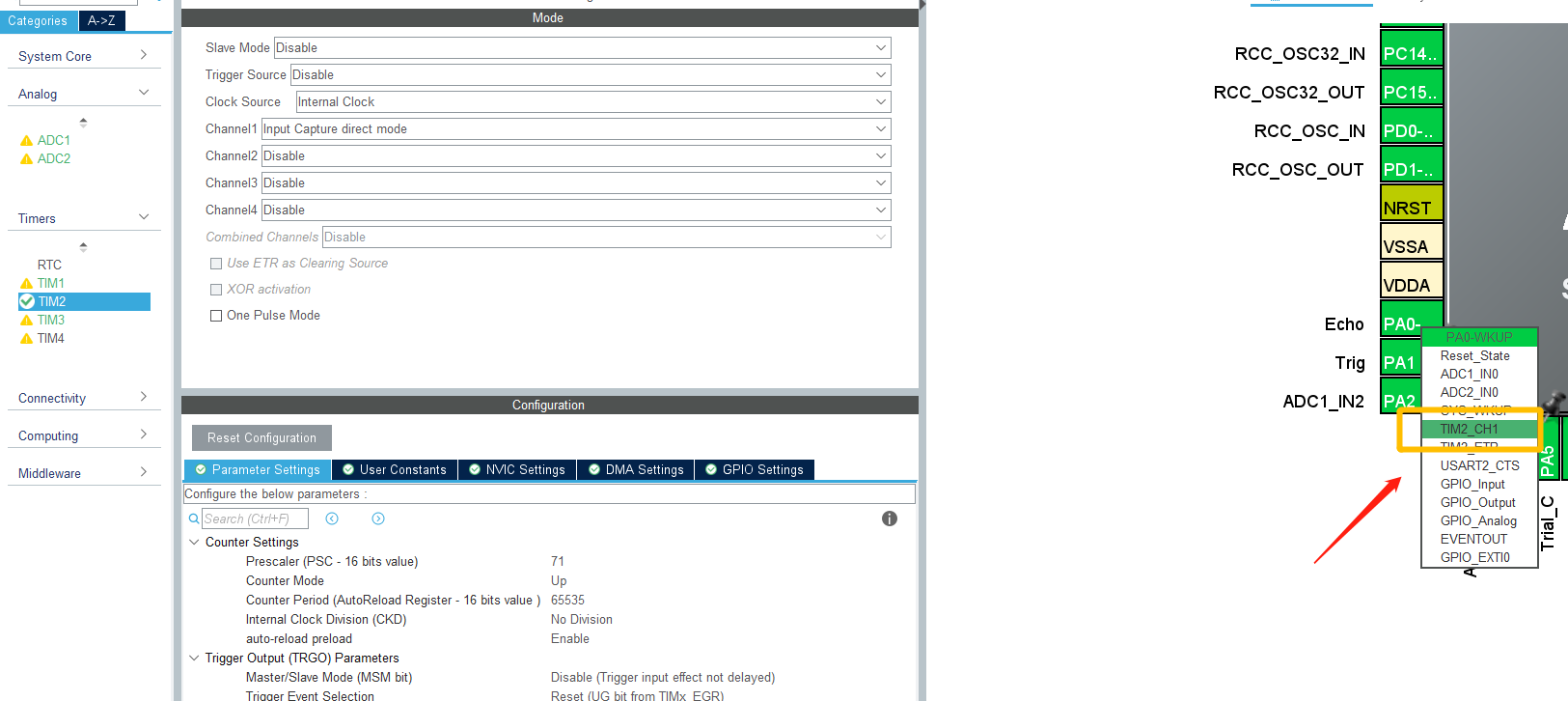
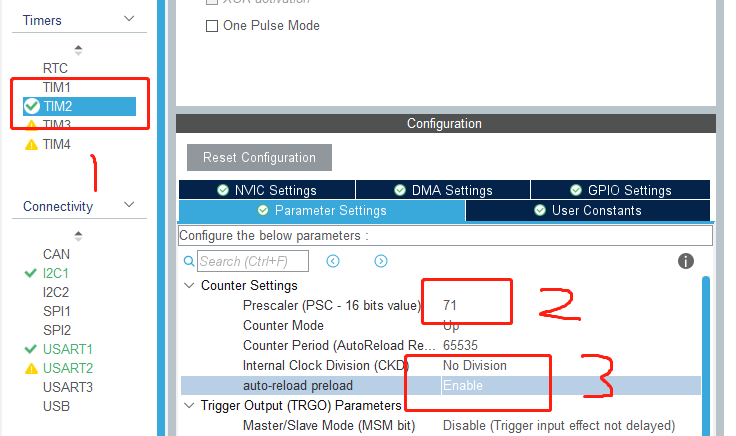
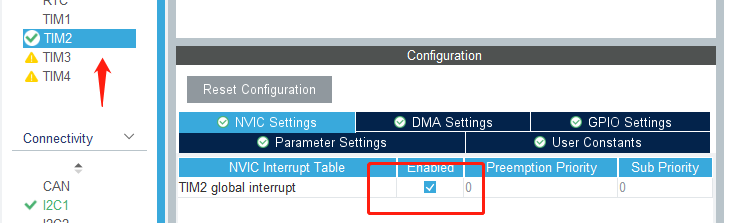
接着对PA0引脚进行TM2_CH1配置,最为Echo管脚,并且使能定时器中断如下图所示。
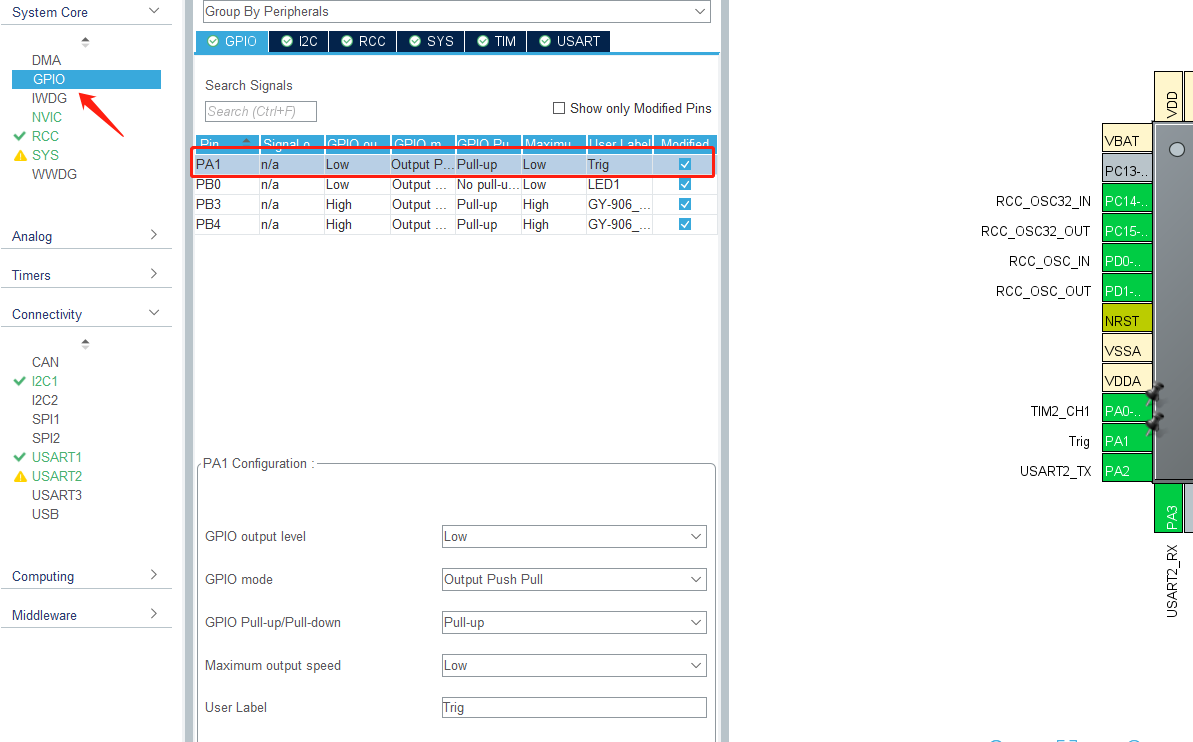
接着对PA1引脚进行配置,作为Trig引脚驱动,配置图如下所示。
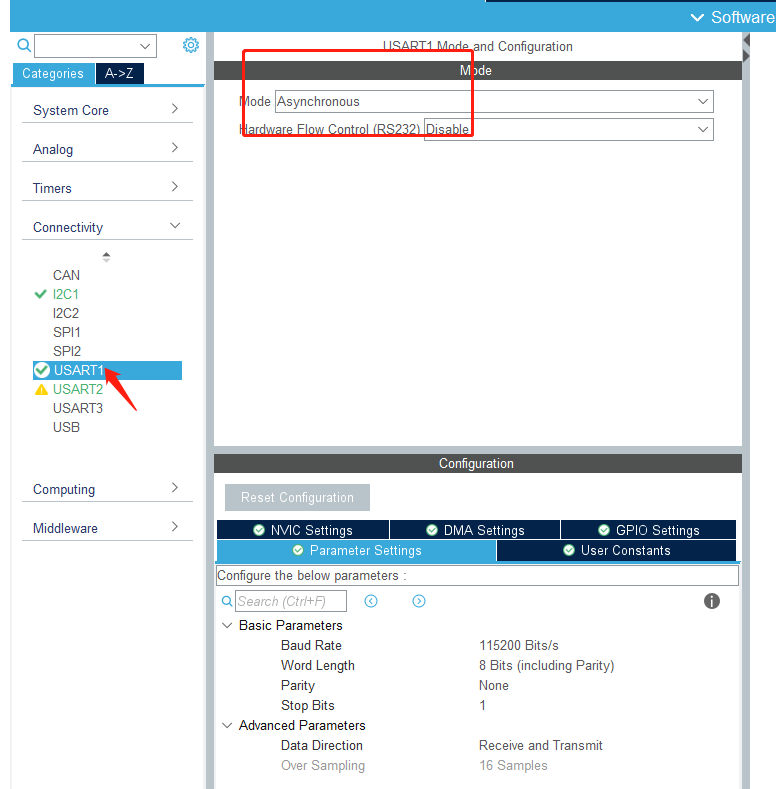
接着对串口1进行配置,如下所示。
最后生成文件,进行程序书写。
2.2 keil端程序书写
-
添加HC-SR04库文件
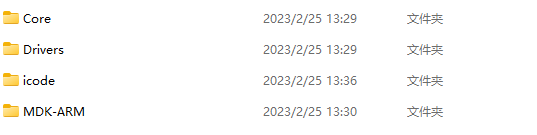
在生成的文件夹中建议新文件夹icode如下所示。
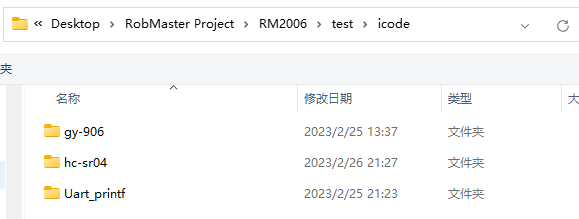
接着在新文件夹中复制gy-906库文件如下所示。
库文件文件链接如下所示。
-
- 链接:https://pan.baidu.com/s/1LpYvlQzCSa8HRgtUxiLu4g
- 提取码:85sl
- --来自百度网盘超级会员V3的分享
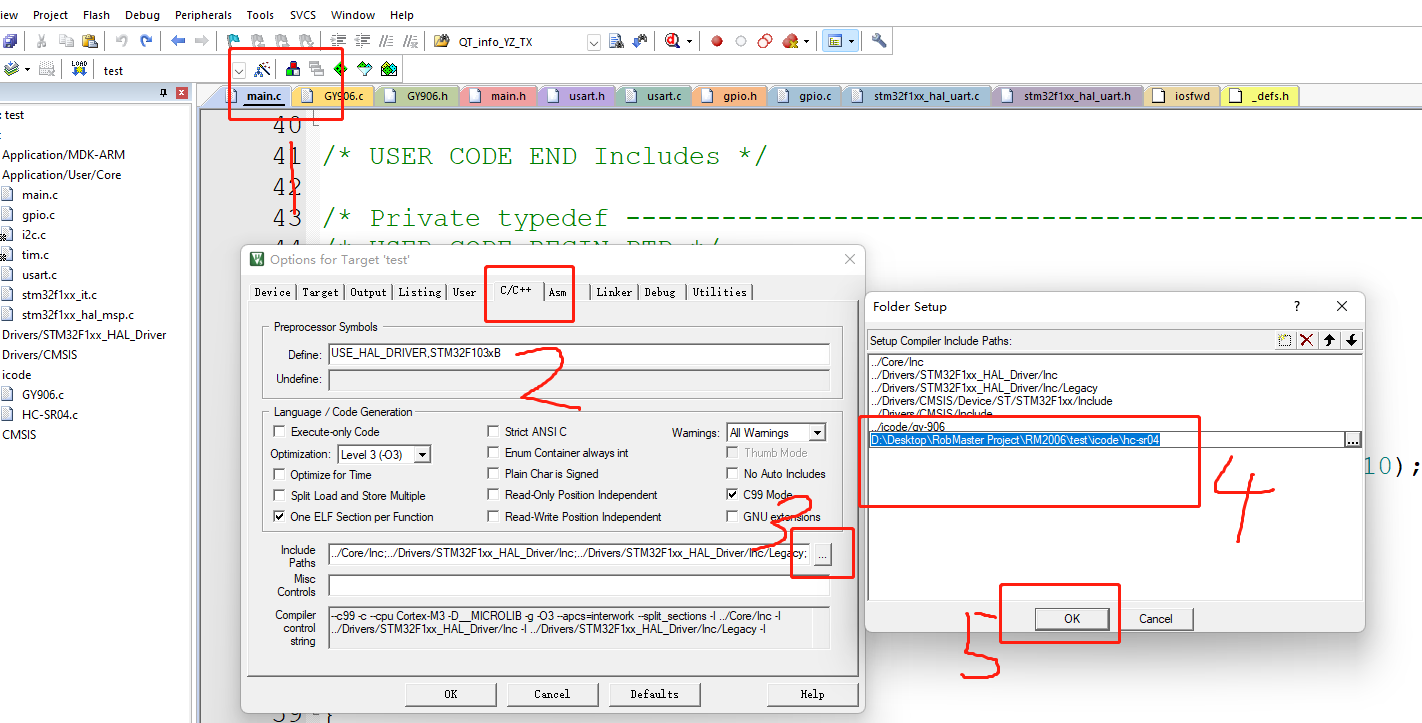
接着在Keil中对驱动文件进行添加,过程如下所示。

如上图所示,将HC-SR04.c文件添加,接着对GY906.h文件进行添加。
2、代码书写
首先引用头文件以及对串口1进行重映射,可以实现printf函数进行数据发送,代码如下所示:
-
- #include "stdio.h"
- #include "HC-SR04.h"
- //#include "Uart_printf.h"
- int fputc(int ch, FILE *f)
- {
- uint8_t temp[1] = {ch};
- HAL_UART_Transmit(&huart1, temp, 1, 2);
- //HAL_UART_Transmit(&huart2, temp, 1, 2);
- return ch;
- }
接着在主函数中对该模块进行数据读取与打印,代码如下所示:
-
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- SR04_GetData();
- printf("\r\n检测距离为:%.2fcm\r\n",distant);
- HAL_Delay(1500);
- /* USER CODE END WHILE */
-
- /* USER CODE BEGIN 3 */
- }
输出结果如下所示:

上文如有错误恳请各位大佬指正。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46193
推荐阅读




相关标签

