
热门标签
热门文章
- 1CNN基础知识笔记_对于主干特征提取网络来说目标的局部细节是浅层还是深层,目标的边界信息是浅层还
- 2python版本升级后编译_python升级到3.*版本
- 3Hadoop-Hive 内部表/外部表 分区表/分桶表区别_hive分区表和非分区表的区别
- 4使用echartgl构建3D中国地图_echarts 3d中国地图
- 5python的赋值操作浅析_python赋值不赋地址
- 6SpringBoot中使用ElasticSearch聚合功能_sptingboot elasticsearch8 template聚合查询
- 7联想Y9000P安装ubuntu20.04问题记录_拯救者y9000p 4080装ubuntu20.04
- 8Spring Boot整合新版Spring Security:Lambda表达式配置优雅安全
- 9ArchLinux 更换系统语言安装搜狗输入法_archlinux安装搜狗输入法
- 10国内maven镜像_maven 国内镜像
当前位置: article > 正文
物联网毕设 -- ESP32-CAN加摄像头传输图像,STM32驱动小车自动避障图像采集并显示到Android端_esp32摄像头数据传输
作者:程序代码艺术家 | 2024-01-30 11:40:36
赞
踩
esp32摄像头数据传输
前言
小车分为两种模式,自动模式以及手动模式,有小车下位机通过按键可以进行模式的切换,自动模式有三个超声波避障,手动模式可以通过APP连接到小车WIFI进行手动控制,并且会有一个ESP32的图像采集回传给小车
一、视频效果演示
物联网毕设 -- ESP32-CAN+STM32
资源包
二、底层硬件端
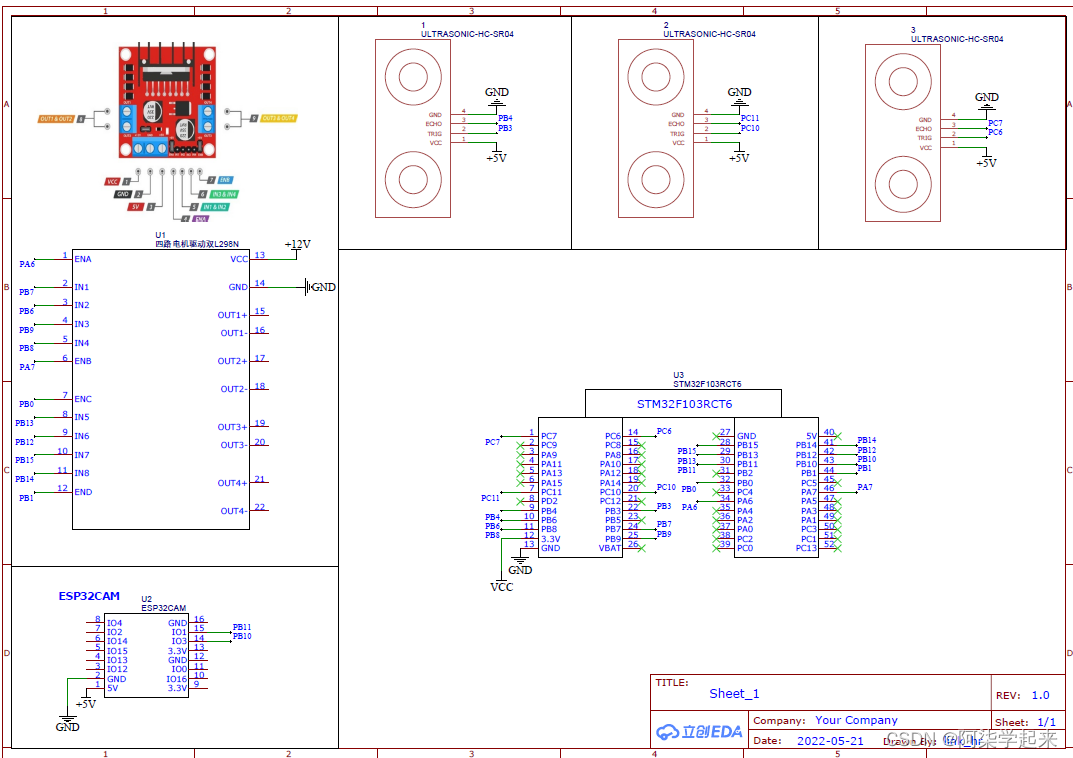
2.1 使用硬件清单
STM32F103RCT6开发板(可以替换为STM32其他系列)
三个超声波测距模块(使用time时钟进行距离的计算)
两个电机驱动板(L2980)---- 使用PWM控制小车的速度
ESP32-CAN模块 ---- 使用串口与STM32经行连接
2.2原理图
2.3 主函数代码
main.h
- #include "stm32f10x.h"
- #include "bsp_usart.h"
- #include "bsp_SysTick.h"
- #include "stm32f10x_it.h"
- #include "hc_sr04.h"
- #include "./dwt_delay/core_delay.h"
- #include "./pwm/user_timer_pwm.h"
- #include "L298N.h"
- #include "car.h"
- #include "timer.h"
- #include "usart_openmv.h"
- #include "timer.h"
- #include "HC_SR04.h"
- #include "car.h"
- #include "key.h"
- //全局变量
- //flage=0 状态手动
- //flage=1 状态自动
- extern int flag;
- 局部变量
- //float Distance1 = 0; //距离
- //float Distance2 = 0; //距离
- //float Distance3 = 0; //距离
- //定义函数
- void Car_run ( void );
- void Hc_rs04 ( void );
- /**
- * @brief 主函数
- * @param 无
- * @retval 无
- */
- extern int flage;
- //小车初始状态
- u8 dir=1;
- u16 led0pwmval=0;
-
- int main ( void )
- {
-
- /* 初始化 */
- /* 配置SysTick 为1us中断一次 */
- SysTick_Init();
-
- CPU_TS_TmrInit(); //初始化DWT计数器,用于延时函数
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- USART_Config (); //初始化串口1
- OpenMV_USART_Config();
- EXTI_Key_Config();
- MTR_GPIOInit();
-
- TIM3_PWM_Init(899,0); //不分频,PWM频率=72000000/900=80Khz
- //超声波定时器
- HC_SR04_IO1_Init(); //超声波模块GPIO初始化
- TIM2_Init(7199,0); //以10KHz计数,定时100us
- HC_SR04_IO2_Init(); //超声波模块GPIO初始化
- TIM4_Init(7199,0); //以10KHz计数,定时100us
- HC_SR04_IO3_Init(); //超声波模块GPIO初始化
- TIM5_Init(7199,0); //以10KHz计数,定时100us
- Delay_ms(500); /* 延时500个tick */
- printf("初始化成功\n");
- while ( 1 )
- {
-
- //Car_run ();
-
- if(flag==1){
- Avoid_Car();
- }else MTR_CarBrakeAll();
-
- }
-
- }
-
-
- /**
- * @brief 小车测试
- * @param 无
- * @retval 无
- */
- /** 小车状态码:
- * 1 小车处于正常行驶
- * 2 小车处于减速一(距离200)
- * 3 小车处于减速二(距离100)
- * 4 小车处于低速状态(距离50)
- *
- * 1 小车处于避障状态
- * 1 小车处于避障状态
- */
- void Car_run ( void )
- {
- car_speed(1);
- MTR_CarForward();
- }
-
- /**
- * @brief 小车超声波测试
- * @param 无
- * @retval 无
- */
- /** 小车状态码:
-
- */
- void Hc_rs04 ( void )
- {
-
- // Distance1 = (Get_SR04_Distance1() * 331) * 1.0/1000;
- // Delay_ms(5);
- // Distance2 = (Get_SR04_Distance2() * 331) * 1.0/1000;
- // Delay_ms(5);
- // Distance3 = (Get_SR04_Distance3() * 331) * 1.0/1000;
- // Delay_ms(5); //Get_SR04_Distance()返回单程声波传输时间 us,转换为秒=时间*10^(-6);331m/s等于331000mm/s,
- // //最终换算为Distance =Get_SR04_Distance()*10^(-6)*331000=(Get_SR04_Distance() * 331) * 1.0/1000;
- // //if(Distance1<1000&&Distance2<1000&&Distance3<1000)
- // printf("%.1f %.1f %.1f\n",Distance1,Distance2,Distance3);
- }
- /*********************************************END OF FILE**********************/

三、APP端
编译平台
APP使用Android studio平台编译
四、资源下载
全部资源
APP+STM32程序+ESP32CAN程序![]() https://download.csdn.net/download/herui_2/85840555
https://download.csdn.net/download/herui_2/85840555
STM32程序+ESP32CAN程序
STM32程序+ESP32CAN程序 https://download.csdn.net/download/herui_2/85840511
https://download.csdn.net/download/herui_2/85840511
APP程序
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46165
推荐阅读





相关标签

