
- 1MySql多表分页_多表分页合适吗
- 2竞赛保研 基于深度学习的水果识别 设计 开题 技术
- 3Springboot整合druid监控_druid springboot statviewservlet
- 4【完美解决·离线安装】Pip安装时遇到Microsoft Visual C++ 14.0 is required错误,下载离线安装包安装即可(2023年11月8日更新资源)_microsoft visual c++ 14.0离线安装
- 5嵌入式相关开源项目、库、资料-汇总 | 干货_嵌入式命令行开源库
- 6K8S篇之实现利用Prometheus监控pod的实时数据指标_promethues监控k8s pod
- 7数据库课程设计(饭店点餐系统)_数据库课程设计餐饮管理系统的e-r图
- 8人工智能基础部分8-深度学习框架keras入门案例,初学者轻松入门_深度学习框架探索与案例学习
- 9Linux下安装docker教程_linux安装docker教程
- 10【k8s】Kubernetes的学习(2.搭建K8S集群----准备k8s集群环境以及集群环境要求和IP设置相关)_自建k8s网关ip
Android Camera - camera provider启动流程_android.hardware.camera.provider@2.4-service
赞
踩
1.camera provider进程介绍:

其中的pid是736,说明camera provider进程启动的时机比较早,而且权限组是 cameraserver
手机上运行的android.hardware.camera.provider@2.4-service进程是支持camera运行的重要进
程。
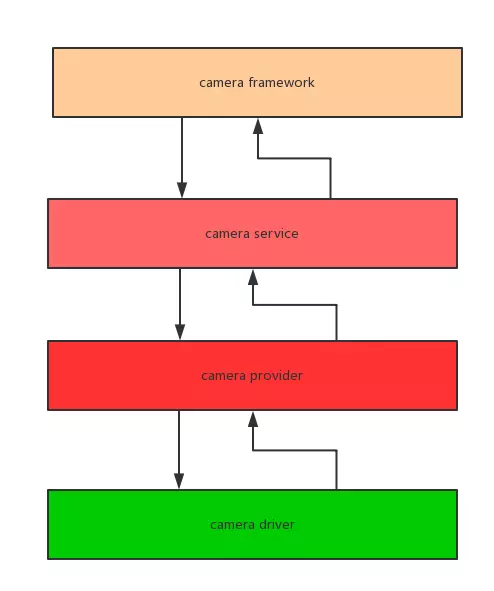
上面这张图比较清楚的表现了camera provider进程在camera架构中位置,作为承上启下的部分,
和cameraserver进程和底层的驱动交互,camera provider进程非常重要,camera HAL层几乎全部
运行在camera provider进程中完成。
2.camera provider进程启动流程
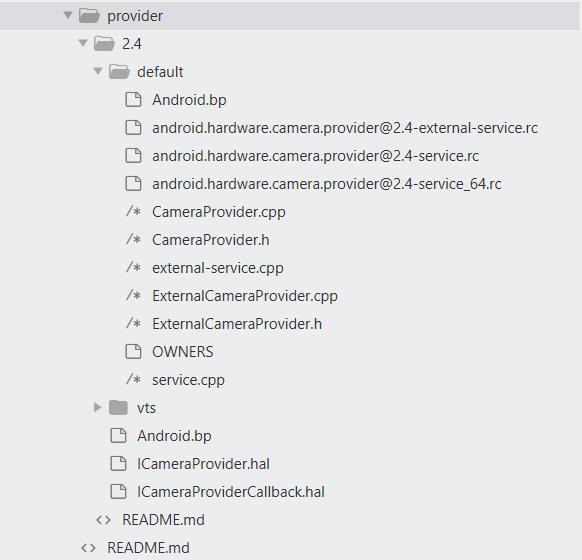
首先看下camera provider所在源码中的位置:hardware/interfaces/camera/provider/
接下来看具体的流程:
cameraserver 与 provider 这两个进程启动、初始化的调用逻辑
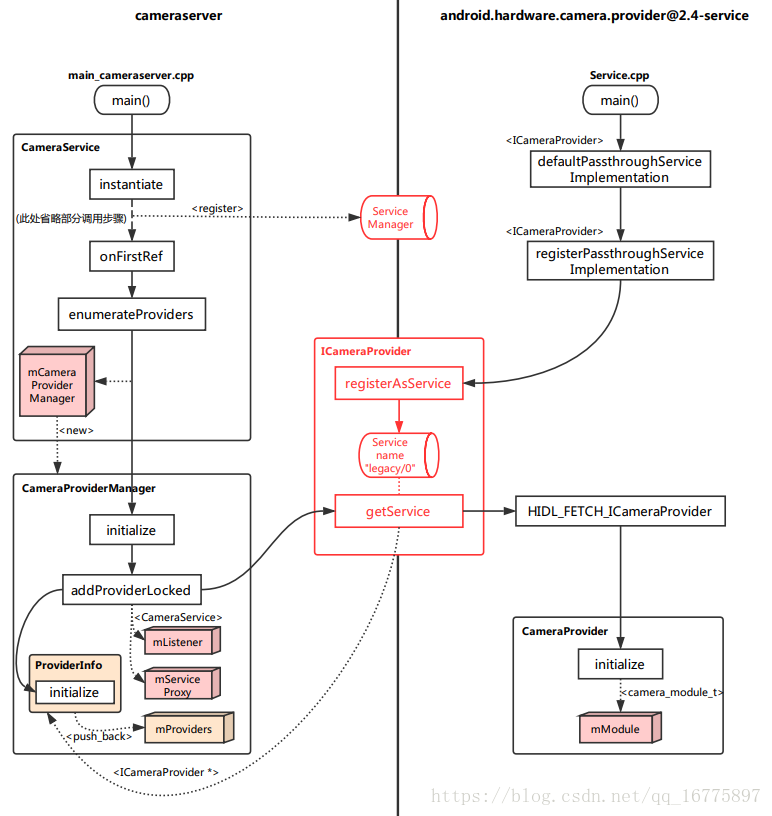
总体逻辑顺序:
provider 进程启动,注册;
cameraserver 进程启动,注册,初始化;
cameraserver 获取远端 provider(此时实例化 CameraProvider 并初始化)。
上图中,实线箭头是调用关系。左边是 cameraserver 进程中的动作,右边则是 provider 进程中的
动作,它们之间通过 ICameraProvider 联系在了一起,而这个东西与 HIDL 相关,我们可以不用关
心它的实现方式。
由图可见:
cameraserver 一侧,Cameraservice 类依旧是主体。它通过 CameraProviderManager 来管理对
CameraProvider 的操作。此处初始化的最终目的是连接上 CameraProvider。
provider 一侧,最终主体是 CameraProvider。初始化最终目的是得到一个 mModule,通过它可以
直接与 HAL 接口定义层进行交互。


3.CameraProvider的启动与注册

NO1: 在系统初始化的时候,系统会去运行android.hardware.camera.provider@2.4-service.rc程序
启动Provider进程,并加入HW Service Manager中接受统一管理,在该过程中实例化了一个
LegacyCameraProviderImpl_2_4对象,并在其构造函数中通过hw_get_module标准方法获取HAL
的camera_module_t结构体,并将其存入CameraModule对象中,之后通过调用该camera_modult_t
结构体的init方法初始化HAL Module,紧接着调用其get_number_of_camera方法获取当前HAL支
持的Camera数量,最后通过调用其set_callbacks方法将LegcyCameraProviderImpl_2a_4
(LegcyCameraProviderImpl_2_4继承了camera_modult_callback_t)作为参数传入CamX-CHI
中,接受来自CamX-CHI中的数据以及事件,当这一系列动作完成了之后,Camera Provider进程
便一直便存在于系统中,监听着来自Camera Service的调用。

NO2: 通过HAL3Module::GetInstance()静态方法实例化了HAL3Module对象,在其构造方法里面通
过HwEnvironment::GetInstance()静态方法又实例化了HwEnvironment对象,在其构造方法中,实
例化了SettingsManager对象,然后又在它构造方法中通过OverrideSettingsFile对象获取了位
于/vendor/etc/camera/camoverridesettings.txt文件中的平台相关的配置信息(通过这种Override机
制方便平台厂商加入自定义配置),该配置文件中,可以加入平台特定的配置项,比如可以通过设
置multiCameraEnable的值来表示当前平台是否支持多摄,或者通过设置overrideLogLevels设置项
来配置CamX-CHI部分的Log输出等级等等。
NO3: 同时在HwEnvironment构造方法中会调用其Initialize方法,在该方法中实例化了
CSLModeManager对象,并通过CSLModeManager提供的接口,获取了所有底层支持的硬件设备
信息,在这个过程中会去打开底层支持的所有子设备,其中包括了Camera Request Manager、
CAPS模块(该驱动模块主要用于CSL获取Camera平台驱动信息,以及IPE/BPS模块的电源控制)
以及Sensor/IPE/Flash等硬件模块,并且通过调用CSLHwInternalProbeSensorHW方法获取了当前
设备安装的Sensor模组信息,并且将获取的信息暂存起来,等待后续阶段使用,总得来说在
HwEnvironment初始化的过程中,通过探测方法获取了所有底层的硬件驱动模块,并将其信息存储
下来供后续阶段使用。
NO4: 之后通过调用HwEnvironment对象中的ProbeChiCompoents方法
在/vendor/lib64/camera/components路径下找寻各个Node生成的So库,并获取Node提供的标准对
外接口,这些Node不但包括CHI部分用户自定义的模块,还包括了CamX部分实现的硬件模块,并
最后都将其都存入ExternalComponentInfo对象中,等待后续阶段使用。
NO5:另外在初始化阶段还有一个比较重要的操作就是CamX 与CHI是通过互相dlopen对方的So
库,获取了对方的入口方法,最后通过彼此的入口方法获取了对方操作方法集合,之后再通过这些
操作方法与对方进行通讯,其主要流程见下图:

从上图不难看出,在HAL3Module构造方法中会去通过dlopen方法加载com.qti.chi.override.so库,
并通过dlsym映射出CHI部分的入口方法chi_hal_override_entry,并调用该方法将HAL3Module对
像中的成员变量m_ChiAppCallbacks(CHIAppCallbacks)传入CHI中,其中包含了很多函数指针,
这些函数指针分别对应着CHI部分的操作方法集中的方法,一旦进入到CHI中,就会将CHI本地的
操作方法集合中的函数地址依次赋值给m_ChiAppCallbacks,这样CamX后续就可以通过这个成员
变量调用到CHI中方法,从而保持了与CHI的通讯。
同样地,CHI中的ExtensionModule在初始化的时候,其构造方法中也会通过调用dlopen方法加载
camera.qcom.so库,并将其入口方法ChiEntry通过dlsym映射出来,之后调用该方法,将
g_chiContextOps(ChiContextOps,该结构体中定义了很多指针函数)作为参数传入CamX中,
一旦进入CamX中,便会将本地的操作方法地址依次赋值给g_chiContextOps中的每一个函数指
针,这样CHI之后就可以通过g_chiContextOps访问到CamX方法。
![Android Termux安装MySQL,并使用cpolar实现公网安全远程连接[内网穿透]](https://img-blog.csdnimg.cn/fabd1c92d58f4f5b8946e9b8f6b49f50.jpeg?x-oss-process=image/resize,m_fixed,h_300,image/format,png)



