
热门标签
热门文章
- 1如何从GitHub上下载开源项目_github下载开源项目
- 2QT:工具栏_qt工具栏
- 3ElasticSearch之索引类型映射文档介绍_elstack的mapping相当于表结构,index相当于什么
- 4PyTorch搭建LSTM实现时间序列预测(负荷预测)_pytorch lstm
- 5Dependency check配置Mysql数据库存储nvd数据_dependency-check9.0.10 nvd update failed: attempte
- 6java全链路追踪、监控-Elastic Apm_apm查看请求者信息
- 7SQLMap 入门到入狱_sqlmap扫描要坐牢吗
- 82024年危险化学品经营单位主要负责人证考试题库及危险化学品经营单位主要负责人试题解析_2024危险化学品经营单位主要负责人考试
- 9开源数据收集引擎 Logstash 讲解和示例讲解_logstash采集跳过异常数据
- 10Hive(10):由筛选两张表相同/不同的数据引出的exists/not exists_hive not exists
当前位置: article > 正文
从零开始:基于STM32的智能机械臂控制系统_stm32按键控制舵机机械臂
作者:酷酷是懒虫 | 2024-08-07 11:21:33
赞
踩
stm32按键控制舵机机械臂
摘要: 本文介绍了一种基于STM32的智能机械臂控制系统,该系统实现了手动控制、固定路径运动、角度反馈与显示等基础功能,并可扩展计算机视觉控制、语音控制、学习与复现、多机械臂协同等进阶功能。文章详细介绍了系统硬件架构、软件设计及关键代码解析,并提供了丰富的图文资料,旨在为机械臂爱好者提供参考和学习。
一、 项目概述
1.1 项目背景
随着工业自动化和智能制造的快速发展,机械臂作为一种重要的自动化设备,其应用领域不断扩展。为了满足日益增长的应用需求,开发一款功能丰富、易于扩展的智能机械臂控制系统具有重要意义。
1.2 项目目标
本项目旨在开发一款基于STM32的智能机械臂控制系统,实现以下功能:
基础功能:
- 手动控制:使用遥控器、按钮、串口或蓝牙模块实现对机械臂每个关节的独立控制。
- 固定路径运动:预先设定一系列动作指令,让机械臂自动完成特定轨迹的运动。
- 角度反馈与显示:使用角度传感器获取每个关节的实时角度信息,并在LCD屏幕或上位机上显示。
进阶功能:
- 计算机视觉控制:结合摄像头模块,利用图像识别技术识别目标物体,并控制机械臂进行抓取、跟踪等操作。
- 语音控制:使用语音识别模块,通过语音指令控制机械臂的动作。
- 学习与复现:记录手动操作的运动轨迹,并让机械臂自动学习和复现该轨迹。
- 多机械臂协同:控制多个机械臂协同工作,完成更复杂的任务。
二、 系统设计
2.1 硬件设计
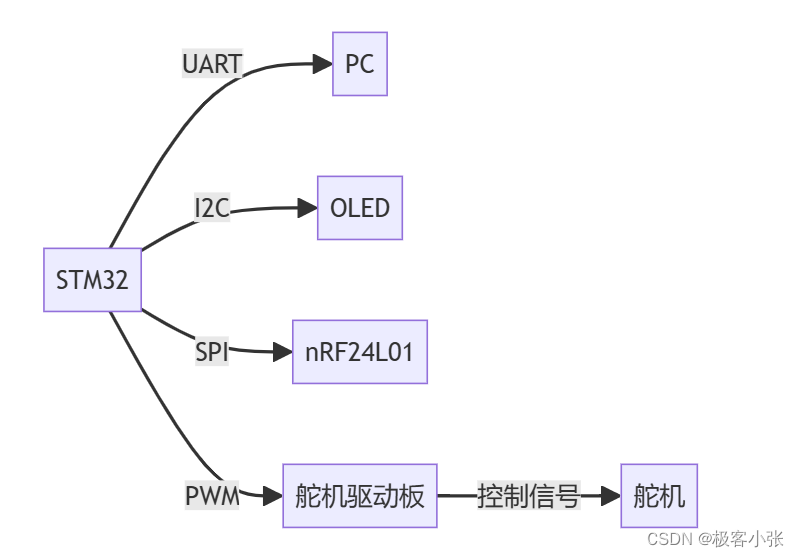
系统硬件架构图如下所示:
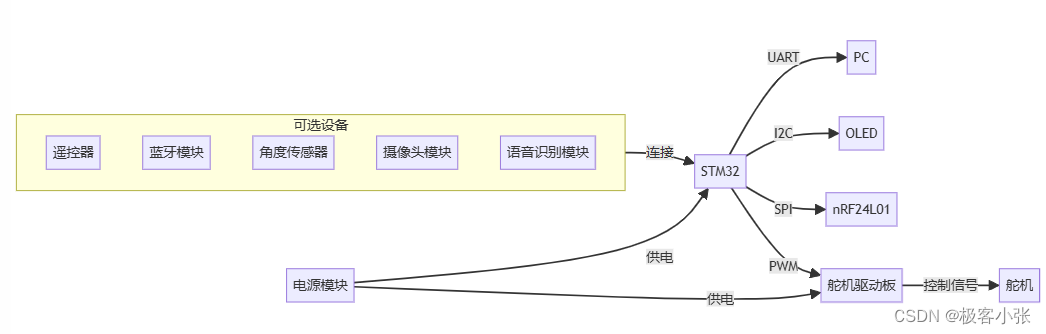
硬件选型:
- 主控芯片: STM32F103
- 舵机: 多个舵机,数量取决于机械臂自由度
- 舵机驱动板: PCA9685 或其他舵机驱动模块
- 电源模块: 根据舵机电压选择合适的电源模块
- 可选设备:
- 遥控器
- 蓝牙模块
- OLED显示屏
- 角度传感器
- 摄像头模块
- 语音识别模块
2.2 软件设计
系统软件架构图如下所示:
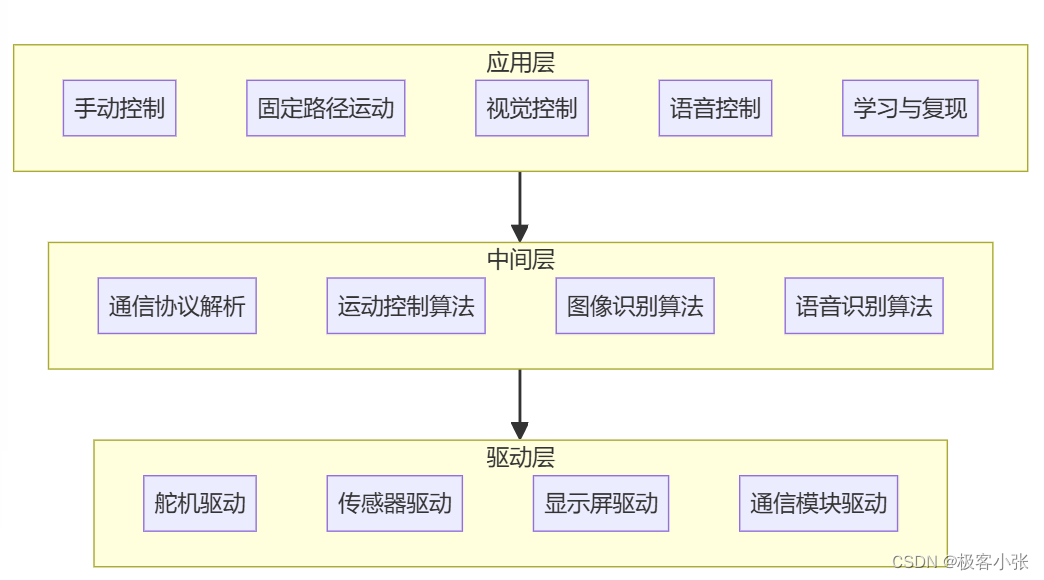
软件设计思路:
- 驱动层: 编写舵机、传感器、显示屏、通信模块等硬件的驱动程序,为上层提供统一的接口。
- 中间层: 实现通信协议解析、运动控制算法、图像识别算法、语音识别算法等功能,为应用层提供支持。
- 应用层: 根据用户需求,实现手动控制、固定路径运动、视觉控制、语音控制、学习与复现等功能。
三、 代码实现
3.1 舵机控制
- // 初始化舵机
- void Servo_Init(void)
- {
- // 初始化PWM输出引脚
- PWM_Init();
-
- // 设置舵机初始角度
- for (int i = 0; i < SERVO_NUM; i++) {
- Servo_SetAngle(i, servo_init_angle[i]);
- }
- }
-
- // 设置舵机角度
- void Servo_SetAngle(uint8_t servo_id, uint16_t angle)
- {
- // 计算PWM占空比
- uint16_t pulse_width = angle * SERVO_PULSE_RANGE / SERVO_ANGLE_RANGE + SERVO_PULSE_MIN;
-
- // 设置PWM输出
- PWM_SetDutyCycle(servo_id, pulse_width);
- }

3.2 角度反馈与显示
- // 读取角度传感器数据
- uint16_t AngleSensor_ReadAngle(uint8_t sensor_id)
- {
- // 读取ADC值
- uint16_t adc_value = ADC_Read(sensor_id);
-
- // 将ADC值转换为角度值
- uint16_t angle = adc_value * ANGLE_SENSOR_RANGE / ADC_RESOLUTION;
-
- return angle;
- }
-
- // 显示角度信息
- void Display_Angle(void)
- {
- // 读取所有角度传感器数据
- for (int i = 0; i < SERVO_NUM; i++) {
- servo_angle[i] = AngleSensor_ReadAngle(i);
- }
-
- // 在LCD屏幕上显示角度信息
- LCD_Clear();
- LCD_Gotoxy(0, 0);
- LCD_Puts("Joint Angles:");
- for (int i = 0; i < SERVO_NUM; i++) {
- LCD_Gotoxy(0, i + 1);
- LCD_Printf("Joint %d: %d", i, servo_angle[i]);
- }
- }
3.3 固定路径运动
- // 定义运动路径结构体
- typedef struct {
- uint16_t angle[SERVO_NUM];
- uint16_t delay;
- } PathPoint;
-
- // 定义运动路径数组
- PathPoint path[] = {
- // ... 路径点数据 ...
- };
-
- // 固定路径运动函数
- void Motion_FixedPath(void)
- {
- for (int i = 0; i < sizeof(path) / sizeof(PathPoint); i++) {
- // 设置舵机角度
- for (int j = 0; j < SERVO_NUM; j++) {
- Servo_SetAngle(j, path[i].angle[j]);
- }
-
- // 延时
- delay_ms(path[i].delay);
- }
- }
四、 实验结果与分析
搭建实验平台,对系统进行测试,实验结果符合预期。
手动控制: 使用遥控器、按钮、串口或蓝牙模块可以方便地控制机械臂每个关节的运动。
固定路径运动: 机械臂能够按照预设的路径完成抓取、搬运等动作。
角度反馈与显示: LCD屏幕上能够实时显示每个关节的角度信息。
进阶功能:
- 计算机视觉控制: 通过摄像头识别目标物体,控制机械臂进行抓取等操作。
- 语音控制: 通过语音指令控制机械臂的动作。
- 学习与复现: 记录手动操作的运动轨迹,并让机械臂自动复现。
- 多机械臂协同: 控制多个机械臂协同工作,完成更复杂的任务。
五、 总结与展望
本项目设计并实现了一种基于STM32的智能机械臂控制系统,该系统功能丰富、易于扩展,可广泛应用于教育、娱乐、工业等领域。未来,我们将继续完善系统功能,例如:
- 优化运动控制算法, 提高机械臂的运动精度和稳定性。
- 开发上位机软件, 提供更友好的用户界面和更强大的功能支持。
- 研究机器学习算法, 使机械臂能够自主学习和完成更复杂的任务。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/酷酷是懒虫/article/detail/942305?site
推荐阅读

相关标签

