
- 1C语言:找出n个数中最大的数和最小的数,并将它们的值输出出来。_找出n个数中最大的数和最小的数,并将它们的值输出出来
- 2Android应用开发(1)Android Studio开发环境搭建_android studio开发app
- 3ubuntu adb 找不到设备问题的解决方法_ubuntu adb找不到设备
- 4js获取给定日期的后几天或者前几天_js获取当前日期后几天
- 5linux usb免驱麦克风,pyaudio检测不到USB 麦克风
- 6基于Visuanl stdio 2017 检测人脸坐标C++代码_c++如何获取人脸识别的坐标
- 7项目开发中遇到的extjs常见问题 _extjs httpproxy 异常关闭后事件
- 8模糊查询like的用法
- 9【数据结构】单链表的层层实现!! !
- 10批量双重加密压缩小工具7z格式_批量压缩文件为加密压缩
matlab做三次拉格朗日插值多项式_机器人轨迹规划:三次样条曲线(matlab)
赞
踩
写在前面
在一些避障的应用场景下,一般都是先在任务空间中对多轴机械臂的末端进行路径规划,得到的是末端的运动路径点数据。这条轨迹只包含位置关系,并没有告诉机器人应该以怎样的速度、加速度运动,这就需要进行带时间参数的轨迹规划处理,也就是对这条空间轨迹进行速度、加速度约束,并且计算运动到每个路点的时间,高级的算法有TOPP等,一般的呢就是贝塞尔、三次准/非/均匀B、五次及三次样条等。下面从最简单的三次样条开始讨论。
三次样条曲线性质
当给出n+1个点时,可以使用n个p次多项式(通常较低)代替唯一的n次插值多项式,每个多项式定义一段轨迹。以这种方式定义的总函数s(t)称为p阶的样条曲线。p的值是根据所需的样条连续度来选择的。例如,为了在两个连续段之间发生过渡的时刻tk获得速度和加速度的连续性,可以假定多项式的阶数p=3(三次多项式)。
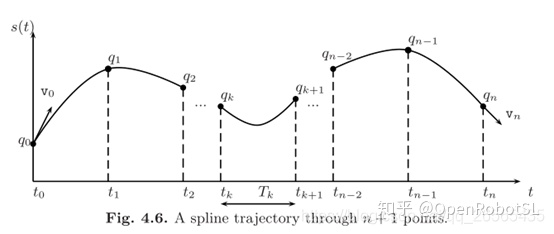
定义三次样条曲线的函数形式为:

这段轨迹由n个三次多项式构成,并且每个多项式需要计算四个参数。由于n个多项式是定义一条通过n+1点的轨迹所必需的,因此需要确定的系数总数为4n。为了解决这个问题,必须考虑以下条件:
- 给定点插值的2n条件,因为每一个三次函数必须在其极值处穿过点。
- n-1个条件,过渡点的速度要连续;
- n-1个条件,过渡点的加速度要连续;
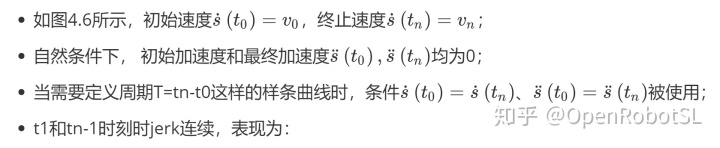
这样的话,就已经限制了2n+2(n-1)个条件,还剩下2个自由度还未限制。通过前面分析,还需要两个限制条件才行,这里讨论的就是初始点和终点的速度以及加速度。下面是几种可能的选择,可以任意选择:

通常情况,样条曲线具有如下几个特性:
- 对于由给定点(tk,qk),k=0,…n得到的p阶样条曲线s(t),[n(p+1)]个参数可以确定
- 给定n+1个点,并且给定边界条件,则p阶插值样条曲线s(t)能被唯一确定
- 用于构造样条曲线的多项式的阶数p不取决于数据点的数目
- 函数s(t)p-1阶连续可导
- 自然样条曲线是指初始加速度和最终加速度均为0的样条曲线
当指定初始速度v0和最终速度vn时的参数计算(也就是v0和vn已知)
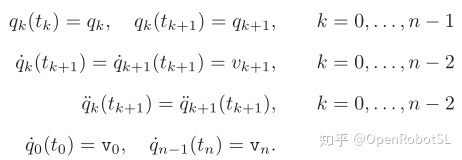
在定义自动机械的轨迹时,速度剖面的连续性条件至关重要。因此,计算样条曲线的典型选择是指定初始和最终速度v0和vn。因此,给定点(tk,qk),k=0,…n以及速度的边界条件(初始速度和最终速度)v0,vn,就有如下几个条件成立:
可以最终确定样条曲线的函数s(t)为

系数ak,i可以由以下算法进行确定:
第一种情况,如果中间点(插补点)的速度我们已知,也就是vk,k=1,…,n-1,对于每段三次样条曲线,有

