
- 1《由浅入深学习SAP财务》:第2章 总账模块 - 2.4 会计凭证处理
- 2Flutter系列--Row属性_flutter row的宽度
- 3第十章:AI大模型的实战项目10.3 实战项目三:语音识别_ai语音大模型
- 4jieba库中基于 TextRank 算法的关键词抽取——源代码分析(三)_使用了jieba的textrank进行高频词的提取,请问textrank实现高频词提取的原理是
- 5鸿蒙Harmony谈了这么久,和Android到底啥区别?_如何区分apk与hap文件
- 6TCP-IP 知识汇总
- 7uni-app 页面级组件onLoad 不触发问题_app.vue不会触发onload
- 8LSTM的备胎,用卷积处理时间序列——TCN与因果卷积(理论+Python实践)_因果卷积代码
- 9android-studio 4.0安装配置_android studio4.0安装
- 10基于自然选择和随机扰动的改进磷虾群算法_随机扰动策略
【算法系列】卡尔曼滤波算法
赞
踩
系列文章目录
·【算法系列】卡尔曼滤波算法
前言
如果信号中的某些频段混入了噪声,可以用低通滤波器、高通滤波器等对这些噪声进行过滤,但当信号中要是混入了白噪声这种没有明显频率段的噪声,这种滤波器的效果将会大大下降,这时就需要采用统计学的方法对信号进行估计,同时采用某种统计准则来衡量估计的误差,使得误差尽可能小,这种滤波器叫现代滤波器,其中简洁、高效的当属卡尔曼滤波。
《麻省理工学院技术评论》在一篇纪念卡尔曼先生的文章中提到道:“卡尔曼最重要的发明是卡尔曼滤波算法,该算法成就了过去50年间的许多基本技术,如把阿波罗号宇航员送上月球的航天计算机系统、把人类送去探索深海和星球的机器人载体,以及几乎所有需要从噪声数据去估算实际状态的项目。有人甚至把包括环绕地球的卫星系统、卫星地面站及各类计算机系统在内的整个GPS系统统称为一个巨大无比的卡尔曼滤波器。”
由此可见卡尔曼滤波在现代科学技术中的重要地位,而在SLAM中卡尔曼滤波也进行了广泛的应用,因此算法系列先讲一下卡尔曼滤波。
一、通俗解释
这个通俗解释是我在学习过程中偶然发现的文章,加上我的理解和解释,分享给大家。
假设一辆在公路上行驶的汽车,起点位置A,下一秒汽车驶入林荫道中的B点,再下一秒汽车驶出林荫道来到C点,行驶到B点的密林中因为我们眼睛看不到,真实位置是需要估计的。
这辆汽车上安装有IMU和GNSS(卫星)两种定位传感器。起点A的位置和速度假设是已知的,距离惯性坐标系X轴原点的距离为2m,速度为。
当车辆驶入到B点时,一方面我们可以根据IMU测量得到汽车本体的三轴加速度和三轴角速度,结合初始速度,便可以计算得到B点相对于A点在X轴方向行驶距离的估计值,这里我们假设估计值为10m(在SLAM系统中,这就是通过状态方程中代入里程计或者IMU测得的状态量估计值)
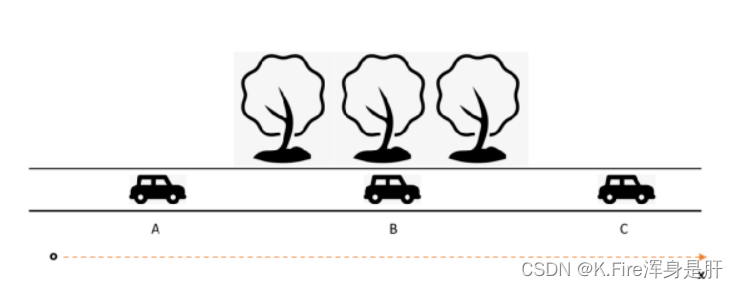
另一方面,通过GNSS我们可以直接测量出来B点的经纬度,通过坐标转换之后可以直接获得B点在X轴方向行驶的观测值,这里我们假设观测值为13m(在SLAM系统中,这就是通过观测方程代入激光雷达或相机数据测得的状态量估计值)
问题来了,距离惯性坐标系点的距离现在有估计值(12m=10m+2m)和观测值(13m)两个值,且两个值不一致,我们该如何确定B点的准确估计值呢?
众所周知,IMU测量汽车本体的加速度和角速度过程中,存在误差和噪声,GNSS通过卫星信号定位车辆经纬度的过程中也存在误差和噪声。
两种传感器给出的值都是一种概率最大,意思是在这个位置的概率最大,其它位置不是不可能只是概率较小。
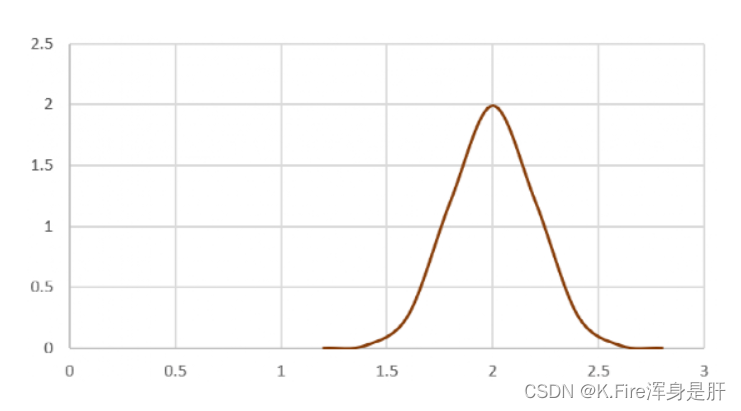
而在卡尔曼滤波算法的理论中,无论是汽车上一秒的位置,IMU的测量数据,还是GNSS的直接观测值均被认为服从正态分布,服从正态分布的随机变量取与均值邻近的值的概率大,取与均值越远的值的概率越小,同时方差越小,分布越集中在均值附近,方差越大,分布越分散
这里我们假设A点位置Xt-1服从N(2,0.22),如下图所示。从图中可以看出2m处纵坐标最大,概率最大,其它取值概率均小于此处。方差0.22则代表A点位置的误差水平。
而对于IMU和GNSS这两种传感器来说,他们的噪声方差是可以测量的,在使用时是已知的,这里我们省略移动模型建模过程,直接假设基于IMU获得B点相对于A点的距离估计值XI服从N(10,0.12) ,方差0.12则代表IMU噪声的误差水平,此误差水平受IMU的精度,测量的累积时长有关。
GNSS通过卫星信号获得B点相对于原点的测量值XG服从N(13,0.42) ,方差0.42代表GNSS噪声的误差水平,此误差水平一方面受GNSS里卫星板卡的精度水平,另一方面主要受所处的环境有关,是否有遮挡,是否多金属环境等。由于B点处于林荫道下,卫星信号时有时无,因此此时0.42的误差水平还是比较高的。
现在我们有了两组数据,一组是B点相对于原点O的估计值XBOI = XI + XA = N(10,0.12) + N(2,0.22) = N(12,0.12 +0.22),一组是B点相对于原点O的观测值XG = N(13,0.42)。
全文的高潮点来了,我该如何从两个概率分布中找到最准确的那个估计值呢,可以想象的是这个准确的估计值也遵从正态分布,这个正态分布的均值就是我们苦苦追寻的值。
卡尔曼给出的答案是,直接将两个概率分布相乘,即N(12,0.12 +0.22) * N(13,0.42)。

正态分布的乘法公式如上,将N(12,0.12 +0.22) * N(13,0.42)中的值带入下面公式,则可以得到如下正态分布。
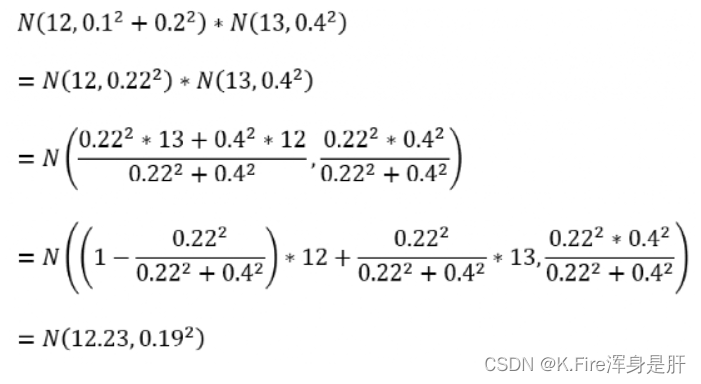
B点的(12.23,0.192)又将作为计算C点位置的初始值,重复上述过程。
二、数学推导
1.问题建模
在很多实际问题中(如SLAM中估计机器人位姿),估计量不能通过直接测量得到,一般会用状态方程和观测方程来描述问题。
状态方程描述的是上一个状态在一定输入
(风力)的作用下到达当前时刻系统状态
的过程,当然这个过程肯定存在一定噪声
(轮胎打滑)
观测方程描述在当前时刻系统状态下观测
(GPS观测)的过程,也存在一定噪声
(GPS信号干扰)
这两个过程中的噪声都服从正态分布,假设
卡尔曼两遍只能处理线性系统,而这里的状态转移函数g和观测函数h往往是非线性函数,需要对其先进性线性化处理,一般线性化的方式都是泰勒展开,这个地方不具体讨论,展开后形式如下:
2.推导过程
(1)数学准备
首先引入一些数学上的概念。
协方差:
当状态量为m维向量时,,这m个随机变量的协方差构成一个协方差矩阵P
另外,我们经常用MSE(均方误差)来衡量估计的准确性,MSE由方差加一个偏差项构成,在无偏估计下MSE就等于方差,也就是可以用方差去描述准确性,这时协方差矩阵的迹tr(P)也等于MSE。
另外还有一些矩阵求导的公式:
(2)具体推导
现在我们有了状态方程,已知上一个时刻状态和输入,以及系数,可以求出一个当前时刻状态的预测值(带噪声);有了观测方程,已知观测,可以反求出一个当前时刻状态的预测值(带噪声),观测偏差可以表示为
将这两种得到预测值的方式加权合并得到:
现在只需要求出权重使得估计误差(MSE)最小就能求出比较准确的估计值,用到上面的结论,在无偏估计中,MSE=方差=tr(P),所以我们现在要求出来协方差矩阵的迹。
代入上面的后整理可得:
将P的迹对K求导后等于0,即可求出取最小值时的K:
这个称为卡尔曼增量,带入方程(后面两项消掉,第二项
不动):
再带入预测值后将整理一下:
3.实际应用
总结来说卡尔曼滤波分为两个过程:预测和更新
更新过程有两个核心公式:
更新过程有三个核心公式:
总结
最后公式推导可能有的公式只写了个结论,但其实也没用到很多数学知识,把上面的值带入,进行一些矩阵多项式展开,合并同类项就能得到结论,大家最好拿张纸自己推导一下,印象也能更深。

