
热门标签
热门文章
- 1【C++学习手札】模拟实现list
- 22024年华为OD机试真题-虚拟游戏理财-Python-OD统一考试(C卷)
- 3【实用技巧】更改ArduinoIDE默认库文件位置,解放系统盘,将Arduino15中的库文件移动到其他磁盘_arduino 库文件位置
- 4HUAWEI华为MateBook X Pro 2022 12代酷睿版(MRGF-16)笔记本电脑原装出厂Windows11系统工厂模式含F10还原
- 5ISFP型人格的优势和劣势分析(mbti性格测试)_mbti职业性格测试isfp计算机
- 6全国职业院校技能大赛-GZ037工业互联网集成应用赛项-赛题3~4_山东省技改提级职业技能竞赛工业互联网标识解析赛项
- 7SpringSecurity6 | 默认用户生成(下)
- 8【数据结构】 链队列的基本操作 (C语言版)
- 9【腾讯云HAI】都2023年了,HAI没玩过AIGC?
- 10【生成对抗网络】Conditional GAN (CGAN,条件GAN) 详细解读_condition gan
当前位置: article > 正文
ROS 18.04 + DepthCamera D455 问题汇总_failed to claim usb interface: 0, error: rs2_usb_s
作者:pgrmghi | 2024-02-04 19:18:18
赞
踩
failed to claim usb interface: 0, error: rs2_usb_status_busy
ROS 18.04 + DepthCamera D455 问题汇总
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
sudo apt-get update
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
mkdir -p ~/RealSense/src
cd ~/RealSense/src
git clone https://github.com/intel-ros/realsense.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
cd ~/RealSense
catkin_make
source devel/setup.bash
roslaunch realsense2_camera rs_rgbd.launch
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
问题1.
报错如下
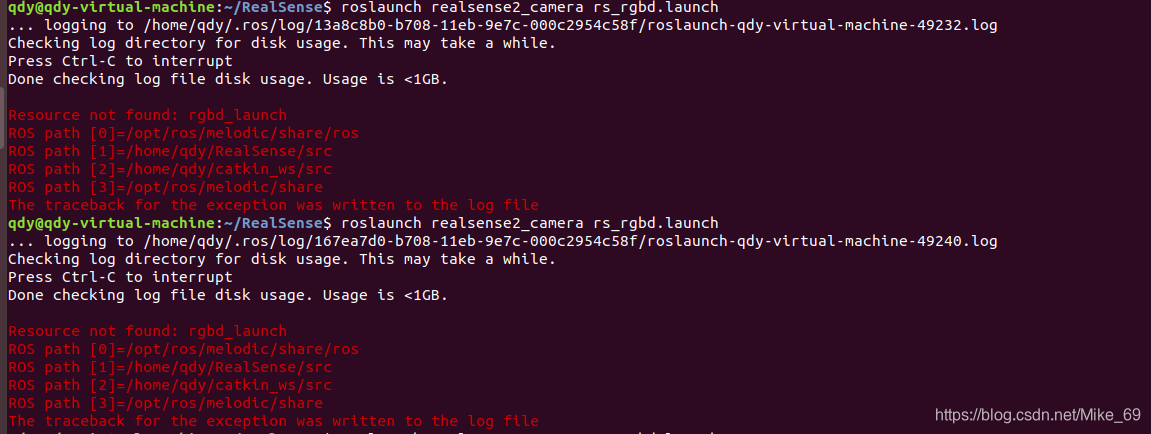
ResourceNotFound: rgbd_launch
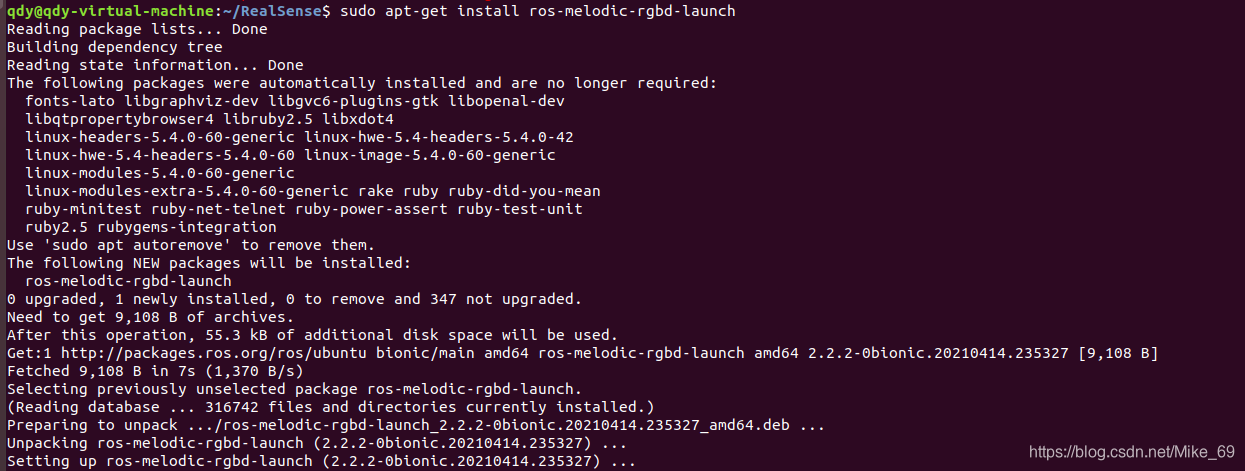
解决方案:
sudo apt-get install ros-melodic-rgbd-launch
- 1
解决后:
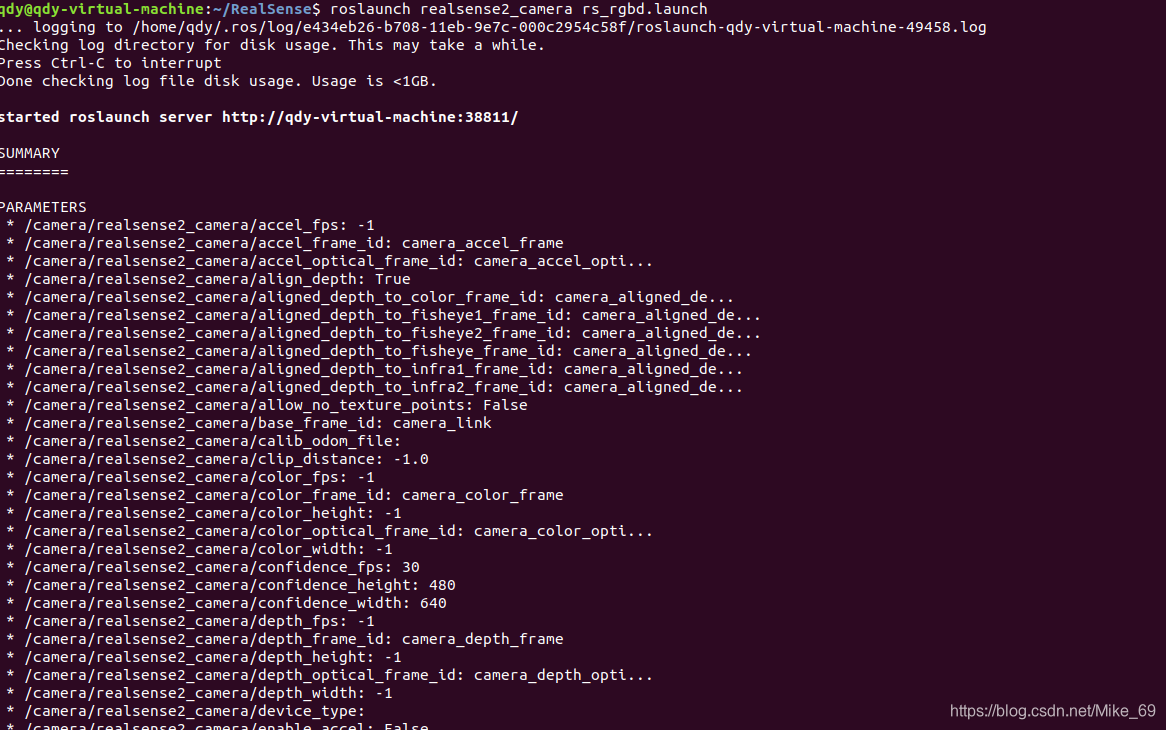
问题2
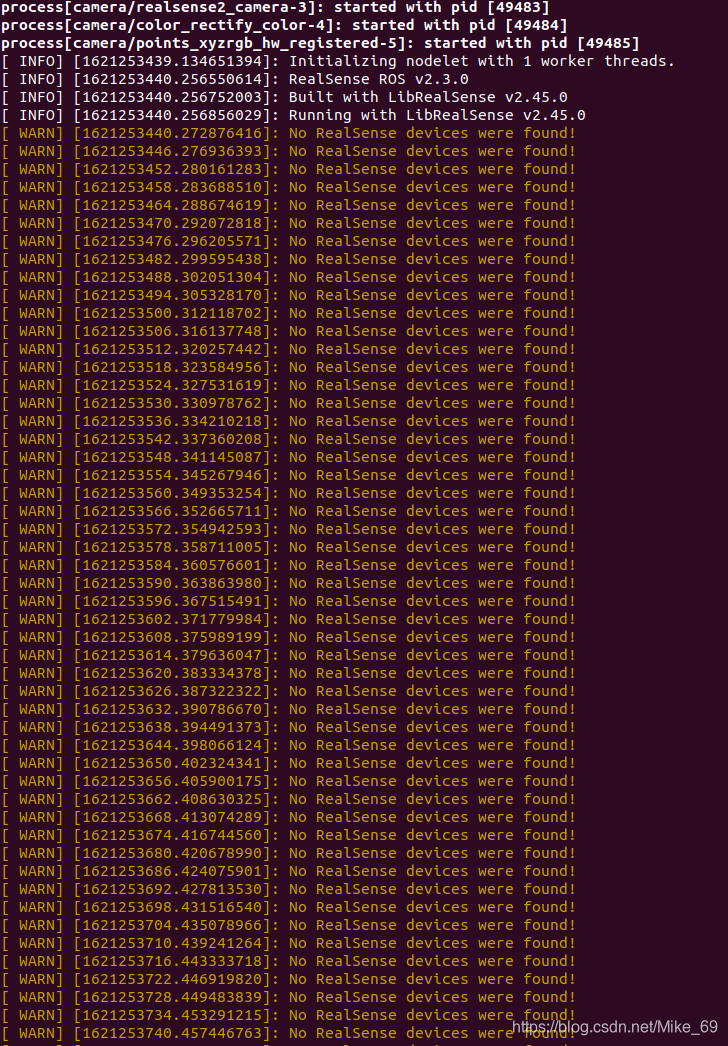
原因。。。比较傻
- USB口如果有3.0限制,要连对
- 我这个是在虚拟机上跑的,我忘了选择设备连接虚拟机了,导致搜索不到设备
2D
3D
问题3.

fatal: unable to access XXX
解决方法
将https改成git
git clone git://github.com/intel-ros/realsense.git
- 1
问题4.
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
- 1
报错
failed to claim usb interface: 0, error: RS2_USB_STATUS_BUSY
解决方法:
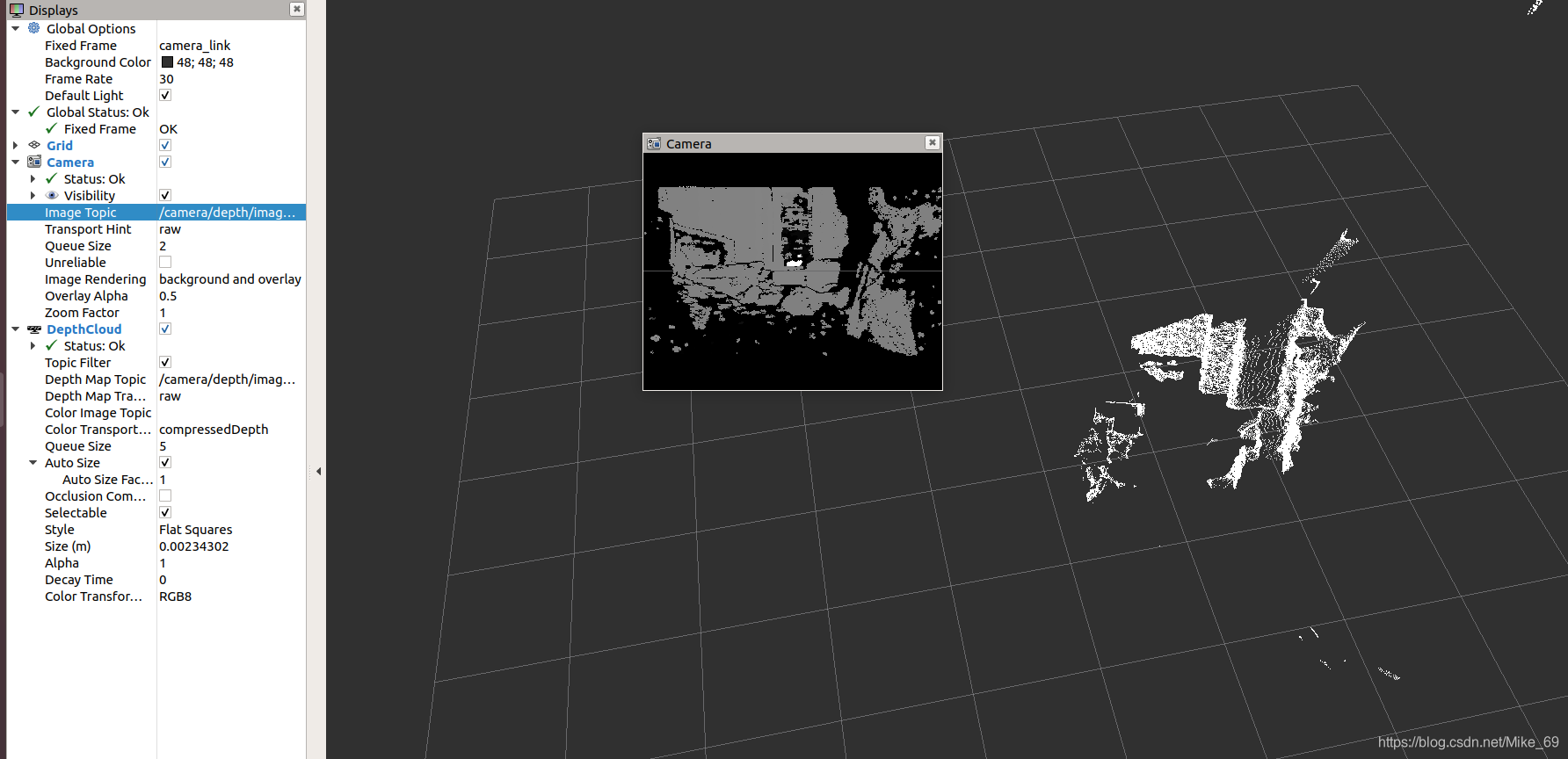
roslaunch realsense2_camera rs_camera.launch
- 1
打开rviz,Global Option- >Fixed Frame后面下拉框选择camera_link
Add添加camera,Depthcloud等,然后再对应的列表里选Topic
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59689
推荐阅读
相关标签

