
- 1k8s 将pod节点上的文件拷贝到本地_pod里面的文件怎么复制出来
- 2BP神经网络入门(原理+matlab代码实现)_bp神经网络matlab
- 3uniapp通讯录等敏感权限检查、申请。获取通话记录等内容_uniapp 打开通话记录权限
- 4经典目标检测YOLO系列(一)复现YOLOV1(5)模型的训练及验证
- 5自然语言处理(Natural Language Processing,NLP)解密
- 6【物联网】继续深入探索ADC模拟转数字的原理——Flash ADC&流水线ADC&逐次逼近型SAR ADC_为什么4bit的flash adc会用到16个比较器
- 7华为od模式违反了法律和道德吗?【华为OD面试常见问题解析2023版】_华为od综面有问题
- 8华为机试(Python)真题Od【A卷+B卷+C卷+D卷】_华为od机试好过吗
- 9Git入门教程
- 10WebFlux中使用WebSocket的拓展功能分析
jetson nano配置ubuntu和ros安装(2)_jetson nano安装ubuntu
赞
踩
jetson nano配置ubuntu和ros安装
1 Ubuntu安装
1 系统安装
因为使用的是jetson nano 4g emmc 16g版,系统内存勉强能用,使用的sdk manager安装方法… 因为太简单了一下子安装好了,没留好截图。如果不会可以看微雪的教程,有问题可以留言!!
2 换源
此处给系统换源 华为云源或者阿里云源2选一 也可以自行选择其他的源,参考前面那个树莓派版一摸一样,因为后面使用华为的源最稳定,所以还是建议华为源
2.1华为云源
这里我使用的是华为云的源,因为使用的是arm架构体系所以使用的是华为云的ubuntu-port接口,操作如下
sudo mv /etc/apt/sources.list /etc/apt/sources.list.bak
wget -O /etc/apt/sources.list http://mirrors.myhuaweicloud.com/repo/aarch64/sources.list.bionic
sudo apt-get update
sudo apt-get upgrade
- 1
- 2
- 3
- 4
如果遇到第二行报错,可能是你的网络网口问题,可以直接下载这个文件密码是ucpj然后移动到/etc/apt/目录下就可以,如果没问题直接跳到3.1
sudo mv sources.list /etc/apt/
sudo apt-get update
sudo apt-get upgrade
- 1
- 2
- 3
或者你可以直接在/etc/apt/目录下的sources.list 输入以下内容
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic main restricted universe multiverse deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic main restricted universe multiverse deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-security main restricted universe multiverse deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-security main restricted universe multiverse deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-updates main restricted universe multiverse deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-updates main restricted universe multiverse deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-backports main restricted universe multiverse deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-backports main restricted universe multiverse ## Not recommended # deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse # deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
2.2 阿里云源
如果使用的是阿里云的源,那么arm架构这里使用应该例子如下
阿里云
3 配置vnc和删除垃圾软件
3.1 节约内存
这里删除不常用文件,因为emmc只有16g ,所以寸土寸金只能删掉做ros开发用处不大的文件,先查看内存
df -h
- 1
然后根据这篇文章1删除自己不常用的文件,以下是我删除的文件操作,大家可以根据自己需求删除。大概能多出2g内存,安装完ros 和配置完rtabmap登slam还是有多余的足够
sudo apt remove deja-dup -y # 卸载备份工具
sudo apt remove remmina -y # 卸载远程工具
sudo apt remove -y libreoffice-common # 卸载系统自带office
sudo apt remove -y transmission-common # 卸载自带下载器
sudo apt remove -y aisleriot # 卸载系统自带的接龙游戏
sudo apt remove -y gnome-mahjongg # 卸载系统自带对对碰游戏
sudo apt remove -y gnome-mines # 卸载系统自带扫雷游戏
sudo apt remove -y gnome-sudoku # 卸载系统自带数独游戏
sudo apt remove -y rhythmbox # 卸载系统自带音乐播放器
sudo apt -y autoremove # 清理卸载软件依赖包
sudo apt remove -y thunderbird # 卸载系统自带的邮件工具
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
3.2 配置vnc
3.2.1 安装vino 和更新
sudo apt-get update
sudo apt-get install vino
- 1
- 2
3.2.2 编辑共享文件
此处桌面共享是有问题的,配置了2台nano都有这个问题。解决方法如下
因为我喜欢使用nano编辑 所以第一条命令先下载nano编辑器
sudo apt-get install nano
sudo nano /usr/share/glib-2.0/schemas/org.gnome.Vino.gschema.xml
- 1
- 2
在打开的文件滑倒末端倒数第三行添加以下代码
<key name='enabled' type='b'>
<summary>Enable remote access to the desktop</summary>
<description>
If true, allows remote access to the desktop via the RFB
protocol. Users on remote machines may then connect to the
desktop using a VNC viewer.
</description>
<default>false</default>
</key>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
切记此处代码的标签格式一定要和该文件的xml相同。不要乱粘贴!!!!!!
最后ctrl+x 退出
按y 确认保存
3.2.3 编译 共享文件
sudo glib-compile-schemas /usr/share/glib-2.0/schemas
- 1
这时候打开system settings 里面的桌面共享配置桌面共享,用户密码只能为八位!!!!
3.2.4 配置vnc开机自启动
cd ~ && mkdir script
cd script && nano openvino
- 1
- 2
粘贴下面的内容
#!/bin/bash
export DISPLAY=:0
gsettings set org.gnome.Vino enabled true
gsettings set org.gnome.Vino prompt-enabled false
gsettings set org.gnome.Vino require-encryption false
xrandr --fb 1280x1024
/usr/lib/vino/vino-server &
- 1
- 2
- 3
- 4
- 5
- 6
- 7
设置的屏幕分辨率是1280x1024 可以自己根据需求设定,我自己根据买的屏幕设定的是1280x800,不要乱改屏幕无法满足的分辨率,那样很容易导致开不了机(踩过坑!!!)
3.2.5添加自启动程序
在启动台输入startup 找到如下软件
点击add - 添加 如下
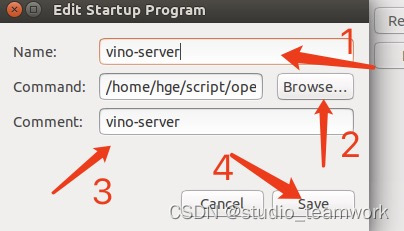
第二步中找到刚刚第五步 创建的文件即可。
3.2.6 下载vnc连接jetson
sudo reboot
- 1
用笔记本的vnc-viewer就能连接jetson-nano了,查找nano的ip 在jetson-nano终端直接输入
ifconfig
- 1
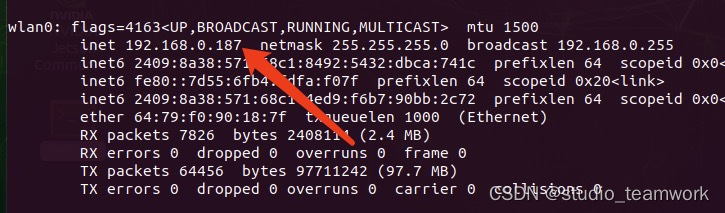
即可连接jetson-nano
4 一些小bug配置
4.1 chorme 输入密码问题
每次点击chorme总是要输入密码2,这个问题就很迷,大家可以根据下面进行操作。
1 在启动台搜索 passwords and keys
2 在 login 选项上右键 选择change password 输入旧密码,然后不输入新密码 一直 continue 就好了
3 重启就可以了
- 1
- 2
- 3
4.2 关闭待机密码
启动台搜索brightness& lock 设置成never lock设置成off 就好了
2 Ros安装
这里配置ros的安装,因为使用的是jetpack4.6 所以使用的ubuntu18.04必须配备 对应的ros版本,这里使用的是arm版的ubuntu,此处安装等同于树莓派4 ubuntu18版安装ros。
2.1 官网流程安装
dpkg --print-architecture
- 1
因为nano使用的是arm架构,我这里配置的是上面说的jetpack4 所以根据官方流程4走就可以了,不想看官方流程的可以根据下面的步骤:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
- 1
- 2
- 3
这里根据需求自己选择安装什么版本的ros,因为我使用的是16g只想节省空间,所以使用的是桌面版的,因为后续要使用的rviz进行调参。
sudo apt install ros-melodic-desktop
- 1
sudo rosdep init
rosdep update
- 1
- 2
这里上面2条命令 进行初始化会报错,可以先使用下面的命令更新初始化源
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
- 1
- 2
- 3
再进行上面的 sudo rosdep init 和 rosdep update 这里的三条命令同时适用于树莓派版ubuntu18安装ros,树莓派ubuntu20 安装ros 是没有这个问题5的。
最后设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 1
- 2
此时ros安装已经完成可以进行ros 开发。
测试一下可以输入
roscore
rosrun turtlesim turtlesim_node
- 1
- 2
2.2 ros主从机配置
这里配置主从关系是把笔记本当服务器,jetson-nano当客户端进行控制,前提是2台电脑必须在同一网络下。通过输入
arp -a
- 1
查找网络下其他设备ip 或者在笔记本电脑和jetson-nano中输入ifconfig 查找自身ip。查找到各自ip后,在笔记本电脑(此处的笔记本是假设安装好了ros的)的终端添加自身ip。
cd ~
nano .bashrc
- 1
- 2
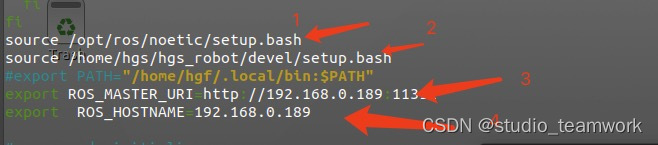
上图是笔记本电脑的.bashrc添加内容,1是笔记本电脑安装的ros和ros路径,在2.1官网安装过程中完成了。234是我们需要添加的,2 是自定义的项目路径,可有可无。3 是这个网络下的ros master的ip 因为笔记本电脑ip是189,master设定在这个ip上后面的客户也需要添加这个到各自的bashrc文件下,4是本机在ros里面的ip。
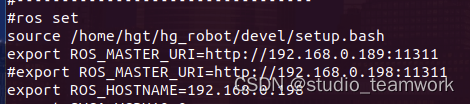
此处是jetson-nano设定的ros 网络下的ip,大家根据自己的网络ip 修改 ros_master_uri 和 ros_hostname
修改完成,在笔记本启动roscore,jetson-nano启动ros节点可以完成 通网络下的主从控制,和多机器协同。
https://blog.csdn.net/cyz141001/article/details/110673651 ↩︎
https://blog.csdn.net/qq_26697045/article/details/89350403 ↩︎
https://blog.csdn.net/weixin_41010198/article/details/109166131 ↩︎
http://wiki.ros.org/cn/melodic/Installation/Ubuntu ↩︎
https://blog.csdn.net/leida_wt/article/details/115120940 ↩︎


