
热门标签
热门文章
- 1vi或vim命令 报错:Can‘t open file for writing_vim can't open file for writing
- 2指针的取值_指针取值
- 3Leetcode 416:分割等和子集(最详细的解法!!!)_等和分割子集解题思路
- 4Stable Diffusion学习指南【安装篇】_秋叶aaaki是谁
- 5命令行查看端口号被哪个进程占用_占用了端口号,用以下命令查看进程名称
- 6100多个经典常用的PHP功能插件大全实例演示和下载_php 常用案例
- 7python库中的ssl.py_python 311 tlsv1_2
- 8什么是GraalVM_graalvm for jdk 中 graalvm什么意思
- 9Linux服务指南_lvm2-lvmetad
- 10【Python】QtDesigner PyUIC PyRcc最新配置方法(PyQt5)_pyrcc配置
当前位置: article > 正文
ros spinonce机制_std_msgs::int32
作者:pjghi | 2024-01-30 22:30:49
赞
踩
std_msgs::int32
创建pub
- #include "ros/ros.h" //包含了使用ROS节点的必要文件
- #include "std_msgs/Int32.h" //包含了使用的数据类型
- #include <sstream>
-
- int main(int argc, char **argv)
- {
- ros::init(argc, argv, "node_a"); //初始化ROS,节点名命名为node_a,节点名必须保持唯一
- ros::NodeHandle n; //实例化节点, 节点进程句柄
- ros::Publisher pub = n.advertise<std_msgs::Int32>("str_message", 1000); //告诉系统要发布话题了,话题名为“str_message”,类型为std_msgs::String,缓冲队列为1000。
- ros::Rate loop_rate(2); //设置发送数据的频率为10Hz
- int count=0;
- //ros::ok()返回false会停止运行,进程终止。
- while(ros::ok())
- {
- std_msgs::Int32 msg;
- msg.data = count;
- count++;
- ROS_INFO("node_a is publishing %d", msg.data);
- pub.publish(msg); //向话题“str_message”发布消息
- ros::spinOnce(); //不是必须,若程序中订阅话题则必须,否则回掉函数不起作用。
- loop_rate.sleep(); //按前面设置的10Hz频率将程序挂起
- }
-
- return 0;
- }

创建sub
- #include "ros/ros.h"
- #include "std_msgs/Int32.h"
- //话题回调函数
- void chatterCallback(const std_msgs::Int32::ConstPtr& msg)
- {
- ROS_INFO("node_b is receiving [%d]", msg->data);
- }
-
-
- int main(int argc, char **argv)
- {
- ros::init(argc, argv, "node_b"); //初始化ROS,节点命名为node_b,节点名必须唯一。
- ros::NodeHandle n; //节点句柄实例化
- ros::Subscriber sub = n.subscribe("str_message", 1000, chatterCallback); //向话题“str_message”订阅,一旦发布节点(node_a)在该话题上发布消息,本节点就会调用chatterCallbck函数。
- ros::Rate loop_rate(1);
- while(ros::ok())
- {
- ros::spinOnce(); //不是必须,若程序中订阅话题则必须,否则回掉函数不起作用。
- loop_rate.sleep(); //按前面设置的10Hz频率将程序挂起
- }
-
- return 0;
- }
上面发布话题是订阅话题发送速度两倍,结果如下:

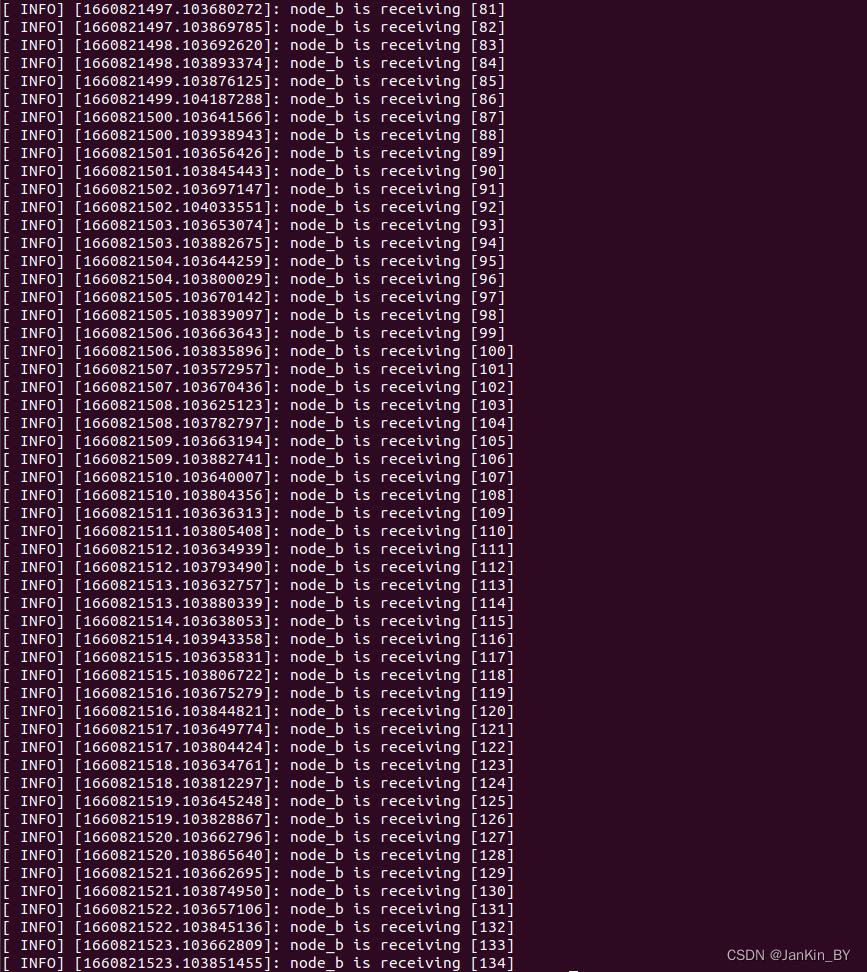
可以看到数据全部接收并打印,ros回调函数是由spinonce触发,触发后会将消息队列中的全部数据处理完成后,进行sleep
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/49926
推荐阅读
相关标签

