
热门标签
热门文章
- 1django.contrib.auth 登陆注销学习
- 2pip install 安装指定版本的包_pip安装指定版本的包
- 3【人工智能】聊聊Transformer,深度学习的一股清流(13)
- 4软件需求总结(总)_软件需求知识点总结
- 5uniapp+vue3+ts(规范化代码配置ESLint+Prettier+Husky)_uni-app eslint prettier 规则设置
- 6SpringMVC 中的数据绑定如何使用 @InitBinder 注解_springmvc binder
- 7Python 直接赋值、浅拷贝和深度拷贝解析_python深拷贝浅拷贝和赋值
- 8批处理命令_if "%1" == "h" goto begin
- 9【VSCode中ChatGPT中文版插件和Chat Moss合并了】_vscode chatmoss
- 10r、s sm2签名值_1st CHARGEBACKS
当前位置: article > 正文
ROS通信机制_ros subscribe
作者:sysmno | 2024-01-30 22:15:45
赞
踩
ros subscribe
ROS通信机制
为了解耦合,在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的。更确切的讲,ROS是进程(也称为Nodes**)的分布式框架。** 因为这些进程甚至还可分布于不同主机,不同主机协同工作,从而分散计算压力。不过随之也有一个问题: 不同的进程是如何通信的?也
ROS 中的基本通信机制主要有如下三种实现策略:
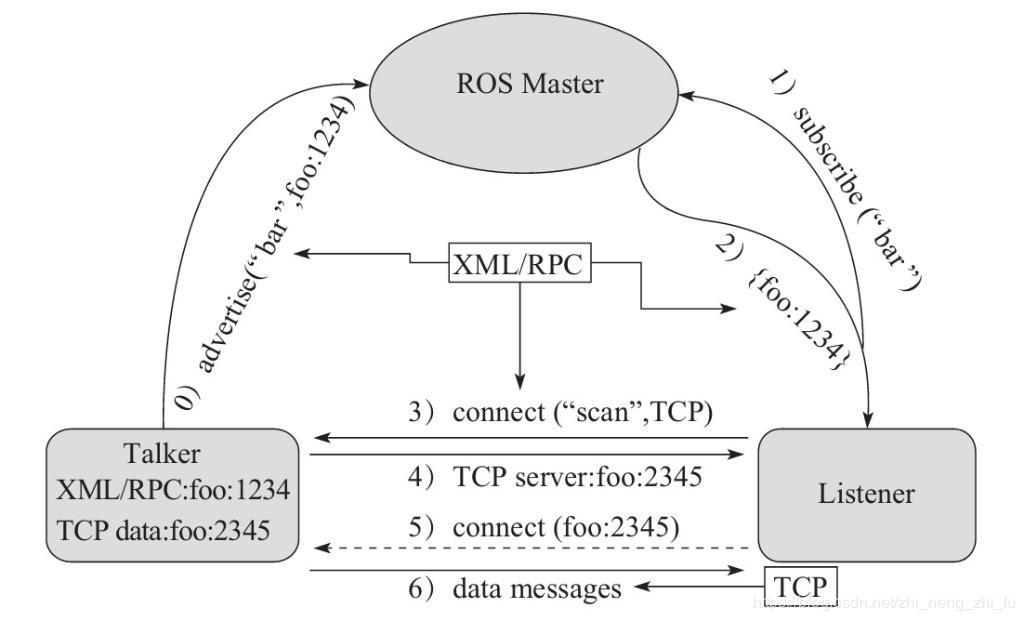
- 话题通信(发布订阅模式)
- 服务通信(请求响应模式)
- 参数服务器(参数共享模式)
参考和完整代码:第 2 章 ROS通信机制 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
话题通信(发布订阅模式)
发布方
- 包含头文件 、导包
- 初始化 ROS 节点:命名(唯一)
- 实例化 ROS 句柄(python中不需初始化句柄)
- 实例化 发布者 对象
- 组织被发布的数据,并编写逻辑发布数据
#include "ros/ros.h" #include "std_msgs/String.h" //普通文本类型的消息 #include <sstream> int main(int argc, char *argv[]) { //设置编码 setlocale(LC_ALL,""); //2.初始化 ROS 节点:命名(唯一) // 参数1和参数2 后期为节点传值会使用 // 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一 ros::init(argc,argv,"talker"); //3.实例化 ROS 句柄 ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能 //4.实例化 发布者 对象 //泛型: 发布的消息类型 //参数1: 要发布到的话题 //参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁) ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10); //5.组织被发布的数据,并编写逻辑发布数据 //数据(动态组织) std_msgs::String msg; // msg.data = "你好啊!!!"; std::string msg_front = "Hello 你好!"; //消息前缀 int count = 0; //消息计数器 //逻辑(一秒10次) ros::Rate r(1); //节点不死 while (ros::ok()) { //使用 stringstream 拼接字符串与编号 std::stringstream ss; ss << msg_front << count; msg.data = ss.str(); //发布消息 pub.publish(msg); //加入调试,打印发送的消息 ROS_INFO("发送的消息:%s",msg.data.c_str()); //根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率; r.sleep(); count++;//循环结束前,让 count 自增 //暂无应用 ros::spinOnce(); } return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
import rospy from std_msgs.msg import String if __name__ == "__main__": #2.初始化 ROS 节点:命名(唯一) rospy.init_node("talker_p") #3.实例化 发布者 对象 pub = rospy.Publisher("chatter",String,queue_size=10) #4.组织被发布的数据,并编写逻辑发布数据 msg = String() #创建 msg 对象 msg_front = "hello 你好" count = 0 #计数器 # 设置循环频率 rate = rospy.Rate(1) while not rospy.is_shutdown(): #拼接字符串 msg.data = msg_front + str(count) pub.publish(msg) rate.sleep() rospy.loginfo("写出的数据:%s",msg.data) count += 1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
订阅方
- 包含头文件
- 定义接收到数据的回调函数
- 初始化
- 设置循环调用回调函数
#include "ros/ros.h" #include "std_msgs/String.h" void doMsg(const std_msgs::String::ConstPtr& msg_p){ ROS_INFO("我听见:%s",msg_p->data.c_str()); // ROS_INFO("我听见:%s",(*msg_p).data.c_str()); } int main(int argc, char *argv[]) { setlocale(LC_ALL,""); //2.初始化 ROS 节点:命名(唯一) ros::init(argc,argv,"listener"); //3.实例化 ROS 句柄 ros::NodeHandle nh; //4.实例化 订阅者 对象 ros::Subscriber sub = nh.subscribe<std_msgs::String>("chatter",10,doMsg); //5.处理订阅的消息(回调函数) // 6.设置循环调用回调函数 ros::spin();//循环读取接收的数据,并调用回调函数处理 return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
import rospy
from std_msgs.msg import String
def doMsg(msg):
rospy.loginfo("I heard:%s",msg.data)
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("listener_p")
#3.实例化 订阅者 对象
sub = rospy.Subscriber("chatter",String,doMsg,queue_size=10)
#4.处理订阅的消息(回调函数)
#5.设置循环调用回调函数
rospy.spin()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
配置 CMakeLists.txt
add_executable(Hello_pub src/Hello_pub.cpp ) add_executable(Hello_sub src/Hello_sub.cpp ) target_link_libraries(Hello_pub ${catkin_LIBRARIES} ) target_link_libraries(Hello_sub ${catkin_LIBRARIES} ) catkin_install_python(PROGRAMS scripts/talker_p.py scripts/listener_p.py DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
自定义msg
需求:创建自定义消息,该消息包含人的信息:姓名、身高、年龄等。
流程
- 按照固定格式创建 msg 文件
- 编辑配置文件
- 编译生成可以被 Python 或 C++ 调用的中间文件
功能包下新建 msg 目录,添加文件 Person.msg
string name
uint16 age
float64 height
- 1
- 2
- 3
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<!--
exce_depend 以前对应的是 run_depend 现在非法
-->
- 1
- 2
- 3
- 4
- 5
CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation ) # 需要加入 message_generation,必须有 std_msgs ## 配置 msg 源文件 add_message_files( FILES Person.msg ) # 生成消息时依赖于 std_msgs generate_messages( DEPENDENCIES std_msgs ) #执行时依赖 catkin_package( # INCLUDE_DIRS include # LIBRARIES demo02_talker_listener CATKIN_DEPENDS roscpp rospy std_msgs message_runtime # DEPENDS system_lib )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
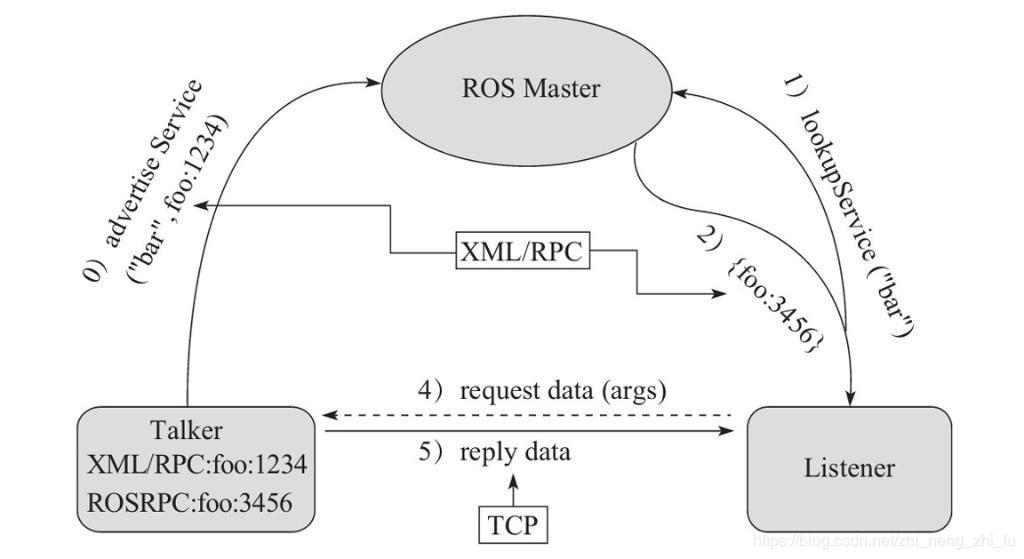
服务通信理论模型
服务通信自定义srv
需求:
服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体。
流程:
srv 文件内的可用数据类型与 msg 文件一致,且定义 srv 实现流程与自定义 msg 实现流程类似:
-
按照固定格式创建srv文件
-
编辑配置文件
-
编译生成中间文件
功能包下新建 srv 目录,添加 xxx.srv 文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum
- 1
- 2
- 3
- 4
- 5
- 6
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<!--
exce_depend 以前对应的是 run_depend 现在非法
-->
- 1
- 2
- 3
- 4
- 5
CMakeLists.txt编辑 srv 相关配置
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation ) # 需要加入 message_generation,必须有 std_msgs add_service_files( FILES AddInts.srv ) generate_messages( DEPENDENCIES std_msgs )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
服务端
- 包含头文件
- 初始化 ROS 节点
- 创建 ROS 句柄
- 创建 服务 对象
- 回调函数处理请求并产生响应
- 由于请求有多个,需要调用 ros::spin()
bool doReq(demo03_server_client::AddInts::Request& req, demo03_server_client::AddInts::Response& resp){ int num1 = req.num1; int num2 = req.num2; ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2); //逻辑处理 if (num1 < 0 || num2 < 0) { ROS_ERROR("提交的数据异常:数据不可以为负数"); return false; } //如果没有异常,那么相加并将结果赋值给 resp resp.sum = num1 + num2; return true; } int main(int argc, char *argv[]) { setlocale(LC_ALL,""); // 2.初始化 ROS 节点 ros::init(argc,argv,"AddInts_Server"); // 3.创建 ROS 句柄 ros::NodeHandle nh; // 4.创建 服务 对象 ros::ServiceServer server = nh.advertiseService("AddInts",doReq); ROS_INFO("服务已经启动...."); // 5.回调函数处理请求并产生响应 // 6.由于请求有多个,需要调用 ros::spin() ros::spin(); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
import rospy from demo03_server_client.srv import AddInts,AddIntsRequest,AddIntsResponse # 回调函数的参数是请求对象,返回值是响应对象 def doReq(req): # 解析提交的数据 sum = req.num1 + req.num2 rospy.loginfo("提交的数据:num1 = %d, num2 = %d, sum = %d",req.num1, req.num2, sum) # 创建响应对象,赋值并返回 # resp = AddIntsResponse() # resp.sum = sum resp = AddIntsResponse(sum) return resp if __name__ == "__main__": # 2.初始化 ROS 节点 rospy.init_node("addints_server_p") # 3.创建服务对象 server = rospy.Service("AddInts",AddInts,doReq) # 4.回调函数处理请求并产生响应 # 5.spin 函数 rospy.spin()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
客户端
- 包含头文件
- 初始化 ROS 节点
- 创建 ROS 句柄
- 创建 客户端 对象
- 请求服务,接收响应
#include "ros/ros.h" #include "demo03_server_client/AddInts.h" int main(int argc, char *argv[]) { setlocale(LC_ALL,""); // 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3 if (argc != 3) // if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径) { ROS_ERROR("请提交两个整数"); return 1; } // 2.初始化 ROS 节点 ros::init(argc,argv,"AddInts_Client"); // 3.创建 ROS 句柄 ros::NodeHandle nh; // 4.创建 客户端 对象 ros::ServiceClient client = nh.serviceClient<demo03_server_client::AddInts>("AddInts"); //等待服务启动成功 //方式1 ros::service::waitForService("AddInts"); //方式2 // client.waitForExistence(); // 5.组织请求数据 demo03_server_client::AddInts ai; ai.request.num1 = atoi(argv[1]); ai.request.num2 = atoi(argv[2]); // 6.发送请求,返回 bool 值,标记是否成功 bool flag = client.call(ai); // 7.处理响应 if (flag) { ROS_INFO("请求正常处理,响应结果:%d",ai.response.sum); } else { ROS_ERROR("请求处理失败...."); return 1; } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
import rospy from demo03_server_client.srv import * import sys if __name__ == "__main__": #优化实现 if len(sys.argv) != 3: rospy.logerr("请正确提交参数") sys.exit(1) # 2.初始化 ROS 节点 rospy.init_node("AddInts_Client_p") # 3.创建请求对象 client = rospy.ServiceProxy("AddInts",AddInts) # 请求前,等待服务已经就绪 # 方式1: # rospy.wait_for_service("AddInts") # 方式2 client.wait_for_service() # 4.发送请求,接收并处理响应 # 方式1 # resp = client(3,4) # 方式2 # resp = client(AddIntsRequest(1,5)) # 方式3 req = AddIntsRequest() # req.num1 = 100 # req.num2 = 200 #优化 req.num1 = int(sys.argv[1]) req.num2 = int(sys.argv[2]) resp = client.call(req) rospy.loginfo("响应结果:%d",resp.sum)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
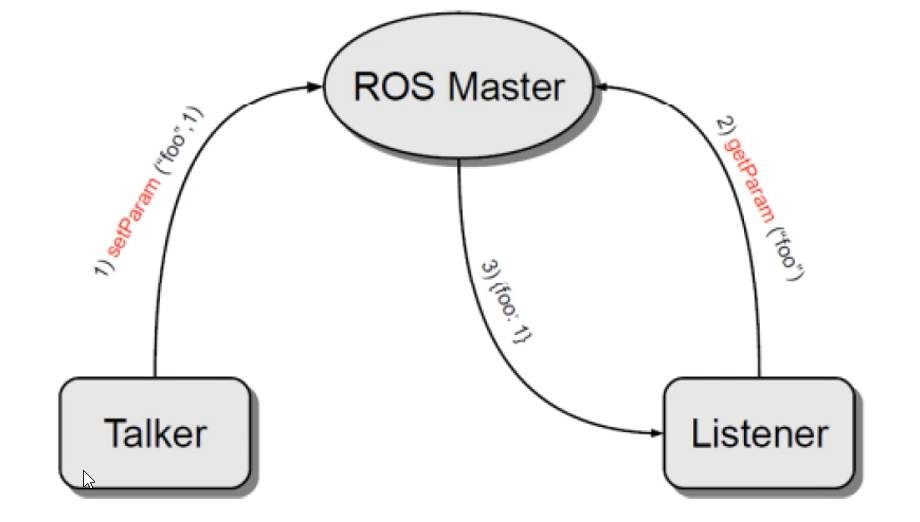
参数服务器
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用。
新增(修改)参数
参数服务器操作之新增与修改(二者API一样)C++实现:
ros::NodeHandle nh;
nh.setParam("键",值)
ros::param::set("键","值")
- 1
- 2
- 3
- 4
rospy.set_param()
- 1
获取参数
ros::NodeHandle param(键,默认值) 存在,返回对应结果,否则返回默认值 getParam(键,存储结果的变量) 存在,返回 true,且将值赋值给参数2 若果键不存在,那么返回值为 false,且不为参数2赋值 getParamCached键,存储结果的变量)--提高变量获取效率 存在,返回 true,且将值赋值给参数2 若果键不存在,那么返回值为 false,且不为参数2赋值 getParamNames(std::vector<std::string>) 获取所有的键,并存储在参数 vector 中 hasParam(键) 是否包含某个键,存在返回 true,否则返回 false searchParam(参数1,参数2) 搜索键,参数1是被搜索的键,参数2存储搜索结果的变量 ros::param ----- 与 NodeHandle 类似
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
rospy
get_param(键,默认值)
当键存在时,返回对应的值,如果不存在返回默认值
get_param_cached(键)
- 1
- 2
- 3
- 4
删除参数
ros::NodeHandle
deleteParam("键")
根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false
ros::param
del("键")
根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false
- 1
- 2
- 3
- 4
- 5
- 6
- 7
try:
rospy.delete_param("p_int")
except Exception as e:
rospy.loginfo("删除失败")
- 1
- 2
- 3
- 4
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/49867
推荐阅读
相关标签

