
热门标签
热门文章
- 1使用Nodejs搭建简单的web网页并实现公网访问_nodejs 访问网页
- 2一文带你深入浅出Web的自动化测试工具Selenium【建议收藏】
- 3我从来不理解JavaScript闭包,但我用了它好多年
- 4【网安AIGC专题】46篇前沿代码大模型论文、24篇论文阅读笔记汇总
- 5vue 数组转对象与对象转数组(对象与数组的相互转换)_vue数组转换对象
- 6Python “贪吃蛇”游戏,在不断改进中学习pygame编程
- 7边玩边学,30个Python小游戏(含源码)
- 8FastAPI 库(Python 的 Web 框架)基本使用指南(二)
- 9FaceChain V2,Human AIGC开源应用平台
- 10人工智能时代AIGC绘画实战
当前位置: article > 正文
基于Pytorch的DDP训练Mnist数据集
作者:算法构造者 | 2024-01-30 15:54:24
赞
踩
基于Pytorch的DDP训练Mnist数据集
在前几期的博文中我们讲了pytorch的DDP,但是当时的demo是自制的虚拟数据集(Pytorch分布式训练:DDP),这期文章我们使用Mnist数据集做测试,测试并完善代码。
快速开始
1. 我们修改一下main函数,在main函数中导入Mnist数据。我这里把测试集关闭了,需要的可以打开。
- def main(rank, world_size, max_epochs, batch_size):
- ddp_setup(rank, world_size)
- train_dataset = datasets.MNIST(root="./MNIST", train=True, transform=data_tf, download=True)
- train_dataloader = DataLoader(train_dataset,
- batch_size=batch_size,
- shuffle=False,
- sampler=DistributedSampler(train_dataset))
-
- model = Net()
- # optimzer = torch.optim.Adam(model.parameters(), lr=1e-3)
- optimzer = torch.optim.SGD(model.parameters(), lr=1e-2)
- trainer = Trainer(model=model, gpu_id=rank, optimizer=optimzer, train_dataloader=train_dataloader)
- trainer.train(max_epochs)
- destroy_process_group()
-
- # test_dataset = datasets.MNIST(root="./MNIST", train=False, transform=data_tf, download=True)
- # test_dataloader = DataLoader(test_dataset,
- # batch_size=32,
- # shuffle=False)
- # evaluation(model=model, test_dataloader=test_dataloader)

2. 修改模型结构,非常简单的一个网络
-
- class Net(nn.Module):
- def __init__(self):
- super(Net, self).__init__()
- self.conv1 = nn.Conv2d(1, 32, kernel_size=3)
- self.conv2 = nn.Conv2d(32, 64, kernel_size=3)
- self.conv2_drop = nn.Dropout2d()
- self.fc1 = nn.Linear( 64*5*5, 500)
- self.fc2 = nn.Linear(500, 10)
- def forward(self, x):
- x = F.relu(F.max_pool2d(self.conv1(x), 2))
- x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2))
- # print(x.shape)
- x = x.view(-1, 64*5*5)
- x = F.relu(self.fc1(x))
- x = F.dropout(x, training=self.training)
- x = self.fc2(x)
- return x
3. 完整代码如下,增加了计算准确率的功能,这些代码可以自己写个函数进行封装的,我太懒了。。。
- """
- pytorch分布式训练结构
- """
- from time import time
- import os
- import torch.nn as nn
- import torch
- import torch.nn.functional as F
- from torch.utils.data import DataLoader
- from torchvision import datasets, transforms
- # 多gpu训练所需的包
- import torch.multiprocessing as mp
- from torch.utils.data.distributed import DistributedSampler
- from torch.nn.parallel import DistributedDataParallel as DDP
- from torch.distributed import init_process_group, destroy_process_group
-
-
- def ddp_setup(rank, world_size):
- """
- 每个显卡都进行初始化
- """
- os.environ["MASTER_ADDR"] = "localhost"
- os.environ["MASTER_PORT"] = "12355"
- # init_process_group(backend="nccl", rank=rank, world_size=world_size)
- init_process_group(backend="gloo", rank=rank, world_size=world_size)
- torch.cuda.set_device(rank)
-
-
- data_tf = transforms.Compose(
- [transforms.ToTensor(),
- transforms.Normalize([0.5],[0.5])]
- )
-
-
- class Net(nn.Module):
- def __init__(self):
- super(Net, self).__init__()
- self.conv1 = nn.Conv2d(1, 32, kernel_size=3)
- self.conv2 = nn.Conv2d(32, 64, kernel_size=3)
- self.conv2_drop = nn.Dropout2d()
- self.fc1 = nn.Linear( 64*5*5, 500)
- self.fc2 = nn.Linear(500, 10)
- def forward(self, x):
- x = F.relu(F.max_pool2d(self.conv1(x), 2))
- x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2))
- # print(x.shape)
- x = x.view(-1, 64*5*5)
- x = F.relu(self.fc1(x))
- x = F.dropout(x, training=self.training)
- x = self.fc2(x)
- return x
-
-
- class Trainer:
- def __init__(self, model, train_dataloader, optimizer, gpu_id):
- self.gpu_id = gpu_id
- self.model = model.to(gpu_id)
- self.train_dataloader = train_dataloader
- self.optimizer = optimizer
- self.model = DDP(model, device_ids=[gpu_id])
- self.criterion = torch.nn.CrossEntropyLoss()
-
- def _run_batch(self, xs, ys):
- self.optimizer.zero_grad()
- output = self.model(xs)
- loss = self.criterion(output, ys)
- loss.backward()
- self.optimizer.step()
-
- _, predicted = torch.max(output, 1)
- return ys.size(0), (predicted == ys).sum()
-
- def _run_epoch(self, epoch):
- batch_size = len(next(iter(self.train_dataloader))[0])
- # print(f"|GPU:{self.gpu_id}| Epoch:{epoch} | batchsize:{batch_size} | steps:{len(self.train_dataloader)}")
- # 打乱数据,随机打乱
- self.train_dataloader.sampler.set_epoch(epoch)
- sample_nums = 0
- train_correct = 0
- for xs, ys in self.train_dataloader:
- xs = xs.to(self.gpu_id)
- ys = ys.to(self.gpu_id)
- sample_num, correct = self._run_batch(xs, ys)
- sample_nums += sample_num
- train_correct += correct
- # print(train_correct.item(), sample_nums)
- print(f"train_acc: {train_correct.item() / sample_nums * 100 :.3f}")
-
- def _save_checkpoint(self, epoch):
- ckp = self.model.module.state_dict()
- PATH = f"./params/checkpoint_{epoch}.pt"
- torch.save(ckp, PATH)
-
- def train(self, max_epoch: int):
- for epoch in range(max_epoch):
- self._run_epoch(epoch)
- # if self.gpu_id == 0:
- # self._save_checkpoint(epoch)
-
-
- def evaluation(model, test_dataloader):
- model.eval()
- model.to("cuda:0")
- sample_nums = 0
- train_correct = 0
- for xs, ys in test_dataloader:
- xs = xs.to("cuda:0")
- ys = ys.to("cuda:0")
- output = model(xs)
- _, predicted = torch.max(output, 1)
- sample_nums += ys.size(0)
- train_correct += (predicted == ys).sum()
- print(f"test_acc: {train_correct.item() / sample_nums * 100 :.3f}")
-
-
- def main(rank, world_size, max_epochs, batch_size):
- ddp_setup(rank, world_size)
- train_dataset = datasets.MNIST(root="./MNIST", train=True, transform=data_tf, download=True)
- train_dataloader = DataLoader(train_dataset,
- batch_size=batch_size,
- shuffle=False,
- sampler=DistributedSampler(train_dataset))
-
- model = Net()
- # optimzer = torch.optim.Adam(model.parameters(), lr=1e-3)
- optimzer = torch.optim.SGD(model.parameters(), lr=1e-2)
- trainer = Trainer(model=model, gpu_id=rank, optimizer=optimzer, train_dataloader=train_dataloader)
- trainer.train(max_epochs)
- destroy_process_group()
-
- # test_dataset = datasets.MNIST(root="./MNIST", train=False, transform=data_tf, download=True)
- # test_dataloader = DataLoader(test_dataset,
- # batch_size=32,
- # shuffle=False)
- # evaluation(model=model, test_dataloader=test_dataloader)
-
-
- if __name__ == "__main__":
- start_time = time()
- max_epochs = 50
- batch_size = 128
- world_size = torch.cuda.device_count()
- mp.spawn(main, args=(world_size, max_epochs, batch_size), nprocs=world_size)
- print(time() - start_time)
训练测试
我简单的测试了一下单卡和多卡的GPU性能(一张3090、一张3090ti),表格如下:

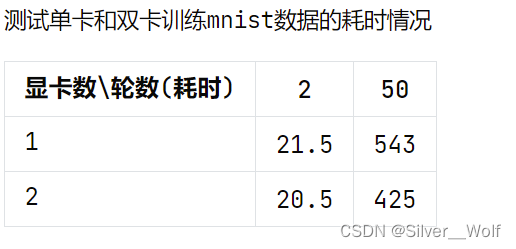
在数据量较小的前提下双卡对单卡优势不明显,加大epoch才能看出明显差距。
结尾
如果不出意外DDP的内容已经结束了,后续发现什么好玩的继续发出来
如果觉得文章对你有用请点赞、关注 ->> 你的点赞对我太有用了
群内交流更多技术
130856474 <-- 在这里
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/47386
推荐阅读
相关标签

