
热门标签
热门文章
- 1深入理解React中的虚拟DOM(源码+分析)_怎么查看react创建的虚拟dom对象
- 2AIGC原理解析、对比与应用_aigc技术原理
- 3Spring如何处理线程并发问题?_springboot async 两个线程抢到了同一数据资源
- 4如何提高gitHub下载速度_github下载速度慢?教你一招变快
- 5测试、开发、运维等 IT 岗位薪酬体系!_产品经理和前端开发哪个工资高
- 6Python:pyinstaller库实现打包代码拷贝到另一台无python环境电脑上运行_ubuntu python项目打包成软件一直到另一个系统中运行
- 7gerrit用户代码审核提交流程_ready to submit
- 8图像SRGB和Adobe RGB伽马校正_标准srgbgamma
- 9第7章 SpringBoot安全管理
- 10超过三十岁就不适合写代码了?看看国外程序员怎么说_程序员30岁还能写代码吗
当前位置: article > 正文
OpenCV + CPP 系列(十九)直方图比较 与 直方图反向投影,投影分割_opencv c++ comparehist cv_comp_intersect
作者:思考机器7 | 2024-01-30 13:27:24
赞
踩
opencv c++ comparehist cv_comp_intersect
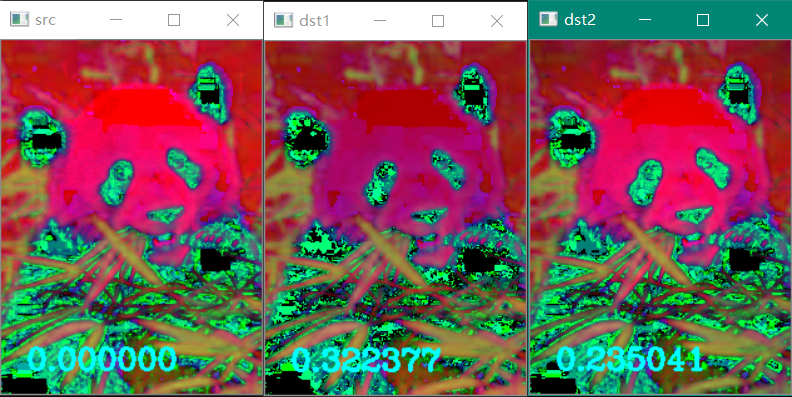
一、直方图比较
对输入的两张图像计算得到直方图H1与H2,归一化到相同的尺度空间,然后可以通过计算H1与H2的之间的距离得到两个直方图的相似程度,进而比较图像本身的相似程度。
Opencv提供的比较方法有四种:
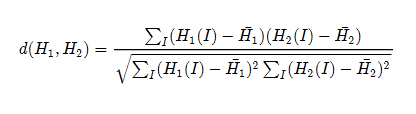
- Correlation 相关性比较 相关性程度 = (1,-1) ,为1时相关性最强
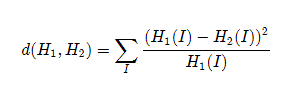
- Chi-Square 卡方比较 (越接近0,两个直方图越相似)
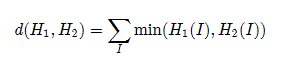
- Intersection 十字交叉性 (取两个直方图每个相同位置的值的最小值,然后求和,这个比较方式不是很好,不建议使用)
- Bhattacharyya distance 巴氏距离 (比较结果是很准的,计算结果范围为 0-1 ,0表示两个直方图非常相关,1最不相似)
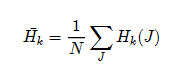
计算公式
其中N是直方图的BIN个数, H ˉ \bar{H} Hˉ 为均值,H1,H2分别表示两个图像的直方图数据
- 相关性计算(CV_COMP_CORREL)
- 卡方计算(CV_COMP_CHISQR)
- 十字计算(CV_COMP_INTERSECT)
- 巴氏距离计算(CV_COMP_BHATTACHARYYA )
颜色空间转换BGR2HSV:
计算图像的直方图,然后归一化到[0~1]之间(calcHist和normalize;)
-
cv::compareHist(
-
InputArray h1, // 直方图数据,下同
InputArray H2,
int method // 比较方法,上述四种方法之一
)
头文件 quick_opencv.h:声明类与公共函数
#pragma once
#include <opencv2\opencv.hpp>
using namespace cv;
class QuickDemo {
public:
...
void compareHist_Demo(Mat& image1, Mat& image2, Mat& image3);
void backProjection_Demo(Mat& image1);
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
主函数调用该类的公共成员函数
#include <opencv2\opencv.hpp> #include <quick_opencv.h> #include <iostream> using namespace cv; int main(int argc, char** argv) { Mat src1 = imread("D:\\Desktop\\pandas_small22.png"); Mat src2 = imread("D:\\Desktop\\pandas_small22_test1.png"); Mat src3 = imread("D:\\Desktop\\pandas_small22_test2.png"); if (src1.empty()) { printf("Could not load images src1...\n"); return -1; } if (src2.empty()) { printf("Could not load images src2...\n"); return -1; } if (src3.empty()) { printf("Could not load images src3...\n"); return -1; } QuickDemo qk; qk.compareHist_Demo(src1, src2, src3); qk.backProjection_Demo(src1); waitKey(0); destroyAllWindows(); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
源文件 quick_demo.cpp:实现类与公共函数
效果演示
void QuickDemo::compareHist_Demo(Mat& image, Mat& test1, Mat& test2) { Mat hsv_dst1, hsv_dst2, hsv_dst3; cvtColor(image, hsv_dst1, COLOR_BGR2HSV); cvtColor(test1, hsv_dst2, COLOR_BGR2HSV); cvtColor(test2, hsv_dst3, COLOR_BGR2HSV); Mat hsv_src1 = hsv_dst1.clone(); Mat hsv_src2 = hsv_dst2.clone(); Mat hsv_src3 = hsv_dst3.clone(); int h_bins = 50; int s_bins = 60; int histSize[] = { h_bins, s_bins }; //h = [0-179] s=[0,255] float h_ranges[] = { 0,180 }; float s_ranges[] = { 0,256 }; const float* ranges[] = { h_ranges, s_ranges }; // Use the o-th and 1-st channels int channels[] = { 0,1 }; MatND hist_base; MatND hist_test1; MatND hist_test2; calcHist(&hsv_dst1, 1, channels, Mat(), hist_base, 2, histSize, ranges, true, false); normalize(hist_base, hist_base, 0, 1, NORM_MINMAX, -1, Mat()); calcHist(&hsv_dst2, 1, channels, Mat(), hist_test1, 2, histSize, ranges, true, false); normalize(hist_base, hist_base, 0, 1, NORM_MINMAX, -1, Mat()); calcHist(&hsv_dst3, 1, channels, Mat(), hist_test2, 2, histSize, ranges, true, false); normalize(hist_base, hist_base, 0, 1, NORM_MINMAX, -1, Mat()); int method[4] = { HISTCMP_CORREL ,HISTCMP_CHISQR, HISTCMP_INTERSECT,HISTCMP_BHATTACHARYYA }; for (int i = 0; i < 4; i++) { double basebase = compareHist(hist_base, hist_base, method[i]); double basetest1 = compareHist(hist_base, hist_test1, method[i]); double basetest2 = compareHist(hist_base, hist_test2, method[i]); putText(hsv_dst1, to_string(basebase), Point(20, image.rows - 20), FONT_HERSHEY_COMPLEX, 0.8, Scalar(255, 255, 0), 2, 8); putText(hsv_dst2, to_string(basetest1), Point(20, image.rows - 20), FONT_HERSHEY_COMPLEX, 0.8, Scalar(255, 255, 0), 2, 8); putText(hsv_dst3, to_string(basetest2), Point(20, image.rows - 20), FONT_HERSHEY_COMPLEX, 0.8, Scalar(255, 255, 0), 2, 8); imshow("src", hsv_dst1); imshow("dst1", hsv_dst2); imshow("dst2", hsv_dst3); // 清空图片文字 hsv_src1.copyTo(hsv_dst1); hsv_src2.copyTo(hsv_dst2); hsv_src3.copyTo(hsv_dst3); waitKey(0); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
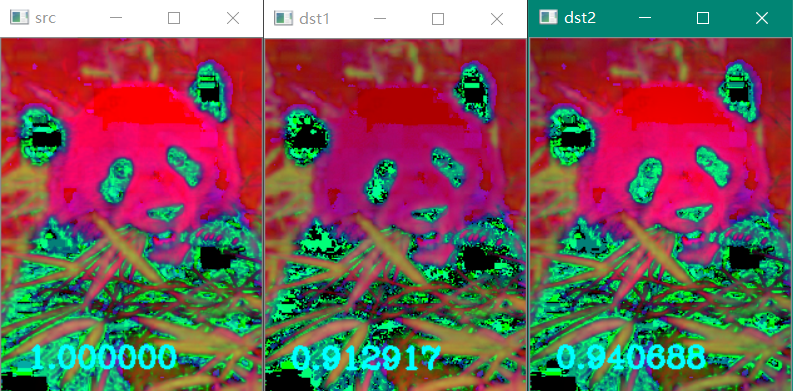
对测试图片进行光影调整后分别保存为test1,test2副本后测试:
比较方法:HISTCMP_CORREL
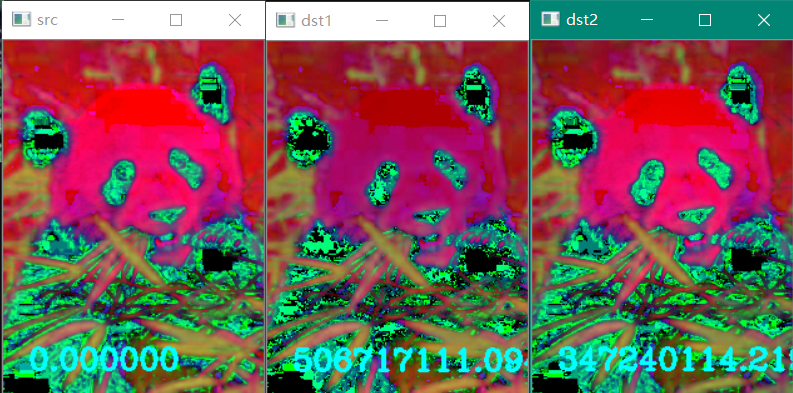
比较方法:HISTCMP_CHISQR
比较方法:HISTCMP_INTERSECT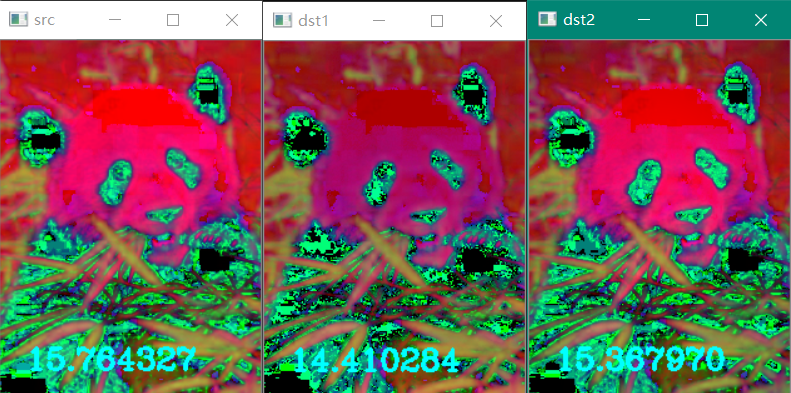
比较方法:HISTCMP_BHATTACHARYYA
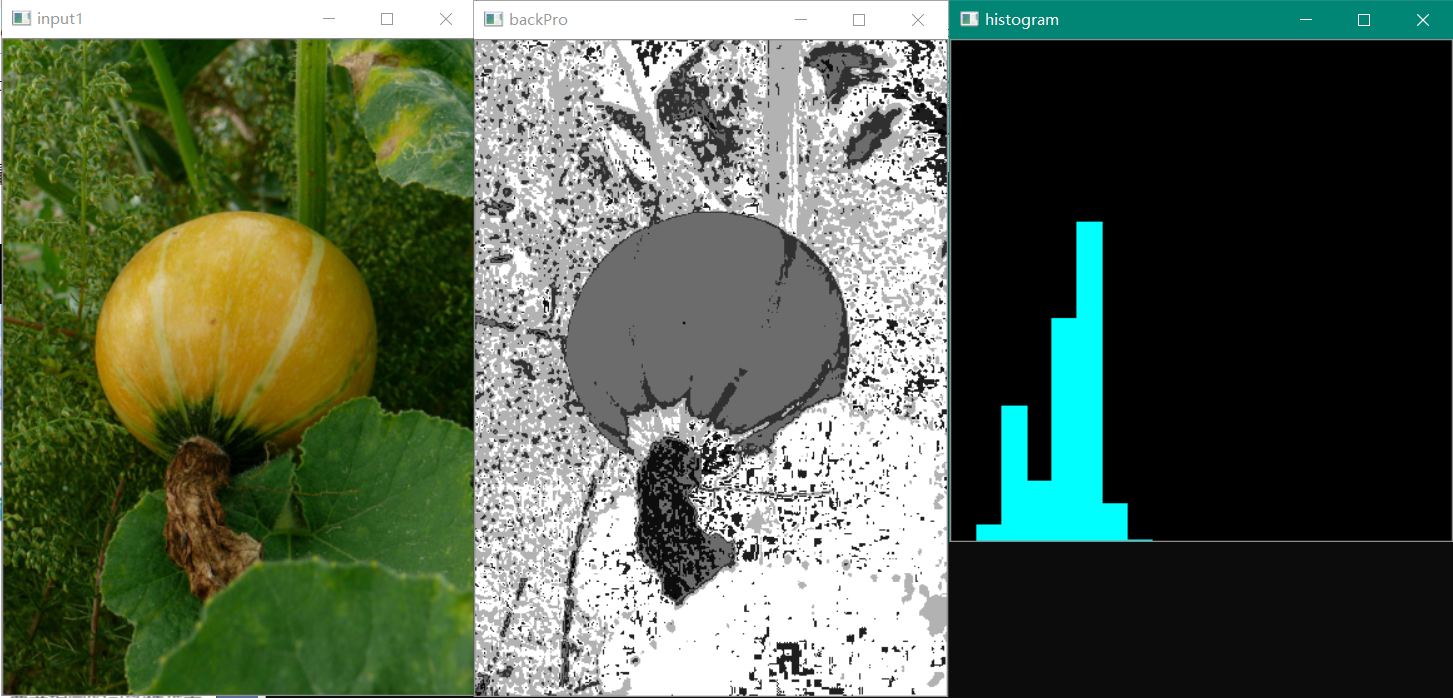
二、直方图反向投影
反向投影是反映直方图模型在目标图像中的分布情况
简单点说就是用直方图模型去目标图像中寻找是否有相似的对象。通常用HSV色彩空间的HS两个通道直方图模型。
一般检查流程
- 加载图片imread
- 将图像从RGB色彩空间转换到HSV色彩空间cvtColor
- 计算直方图和归一化calcHist与normalize
- Mat与MatND其中Mat表示二维数组,MatND表示三维或者多维数据,此处均可以用Mat表示。
- 计算反向投影图像 - calcBackProject
共三个重载函数,我这里只列出一个
-
void calcBackProject(
-
const Mat*
images, 输入图像,图像深度必须位CV_8U,CV_16U或CV_32F中的一种
int nimages, 输入图像的数量
const int* channels, 用于计算反向投影的通道列表,通道数必须与直方图维度相匹配
InputArray hist, 输入的直方图,直方图的bin可以是密集(dense)或稀疏(sparse)
OutputArray backProject, 目标反向投影输出图像,是一个单通道图像
const float** ranges, 方图中每个维度bin的取值范围
double scale = 1, 可选输出反向投影的比例因子
bool uniform = true 直方图是否均匀分布(uniform)的标识符,有默认值true
)
void QuickDemo::backProjection_Demo(Mat& image, Mat& test1) { Mat hsv,h_mat; cvtColor(image, hsv, COLOR_BGR2HSV); h_mat = Mat::zeros(hsv.size(), hsv.depth()); int nchannels[] = { 0,0 }; mixChannels(&hsv,1, &h_mat, 1, nchannels, 1); int binSize = 12; float range[] = { 0,180 }; const float* histRange{ range }; Mat h_hist; calcHist(&h_mat, 1, 0, Mat(), h_hist, 1, &binSize, &histRange, true, false); normalize(h_hist, h_hist, 0, 255, NORM_MINMAX, -1, Mat()); Mat backProjectImage; calcBackProject(&h_mat, 1,0, h_hist, backProjectImage, &histRange, 1, true); imshow("backPro", backProjectImage); int hist_h = 400; int hist_w = 400; Mat hist_Image = Mat::zeros(hist_w, hist_h, CV_8UC3); int bin_w = hist_w / binSize; for (int i = 0; i < binSize; i++) { rectangle(hist_Image, Point((i - 1) * bin_w, hist_h - cvRound(h_hist.at<float>(i - 1) * (400 / 255))), Point(i* bin_w, hist_h), Scalar(255, 255, 0), -1); } imshow("histogram", hist_Image); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
使用效果:
使用 trackbar 详情
使用trackbar, 代码有问题,请教大佬。
static void on_bin_hist(int binSize_, void* h_mat_) { Mat h_hist; Mat h_mat = *((Mat*)h_mat_); int binSize = MAX(binSize_, 2); float range[] = { 0,180 }; const float* histRange{ range }; calcHist(&h_mat, 1, 0, Mat(), h_hist, 1, &binSize, &histRange, true, false); normalize(h_hist, h_hist, 0, 255, NORM_MINMAX, -1, Mat()); Mat backProjectImage; calcBackProject(&h_mat, 1, 0, h_hist, backProjectImage, &histRange, 1, true); imshow("backPro", backProjectImage); int hist_h = 400; int hist_w = 400; Mat hist_Image = Mat::zeros(hist_w, hist_h, CV_8UC3); int bin_w = cvRound((double)hist_w / binSize); for (int i = 0; i < binSize; i++) { rectangle(hist_Image, Point((i - 1) * bin_w, hist_h - cvRound(h_hist.at<float>(i - 1) * (400 / 255))), Point(i * bin_w, hist_h), Scalar(255, 255, 0), -1); } imshow("histogram", hist_Image); } void QuickDemo::backProjection_track_bar_Demo(Mat& image) { namedWindow("histogram", WINDOW_NORMAL); namedWindow("backPro", WINDOW_NORMAL); int binSize = 12; Mat hsv, h_mat; cvtColor(image, hsv, COLOR_BGR2HSV); h_mat = Mat::zeros(hsv.size(), hsv.depth()); int nchannels[] = { 0,0 }; mixChannels(&hsv, 1, &h_mat, 1, nchannels, 1); createTrackbar("hist_bins", "histogram", &binSize, 180, on_bin_hist, &h_mat); on_bin_hist(binSize, &h_mat); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
三、投影分割
if (image.empty() || image.cols != 150 || image.rows != 70) return; cv::Mat Image2; int chanels = image.channels(); if (4 == chanels) cv::cvtColor(image, image, cv::COLOR_BGRA2GRAY); else if (3 == chanels) cv::cvtColor(image, image, cv::COLOR_BGR2GRAY); cv::threshold(image, image, 250, 255, cv::THRESH_BINARY); cv::bitwise_not(image, image); int height = image.rows; int width = image.cols; // 水平投影:统计并存储每一行的和 std::vector<int> horizontal(height); for (size_t h = 0; h < height; h++) { uchar* row_ptr = image.ptr<uchar>(h); for (size_t w = 0; w < width; w++) { horizontal[h] += *row_ptr++; } } cv::transpose(image, Image2); // 垂直投影:统计并存储每一列的和 std::vector<int> vertical(width); for (size_t h = 0; h < width; h++) { uchar* row_ptr = Image2.ptr<uchar>(h); for (size_t w = 0; w < height; w++) { vertical[h] += *row_ptr++; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46622
推荐阅读



相关标签

